 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Human Model Dataset for Skeleton Driven Non-rigid Motion Tracking and 3D Reconstruction
Mar 07, 2019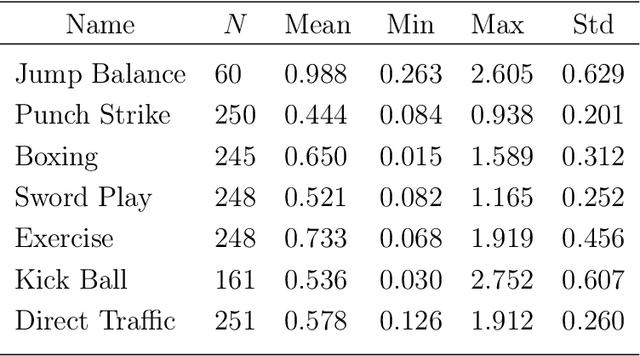
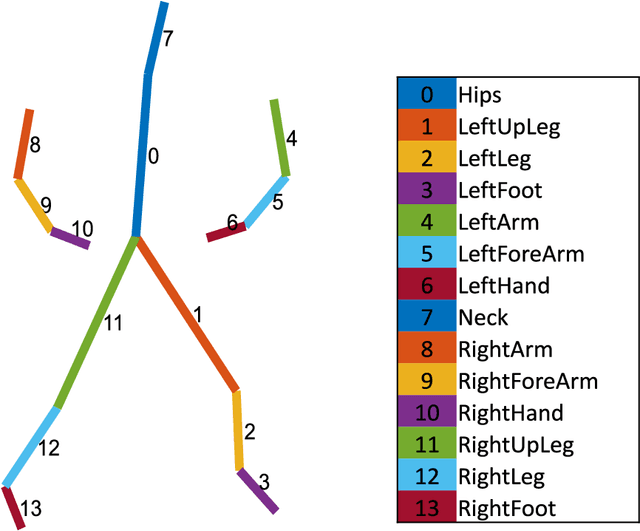
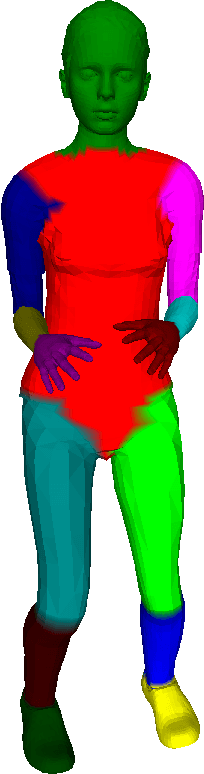
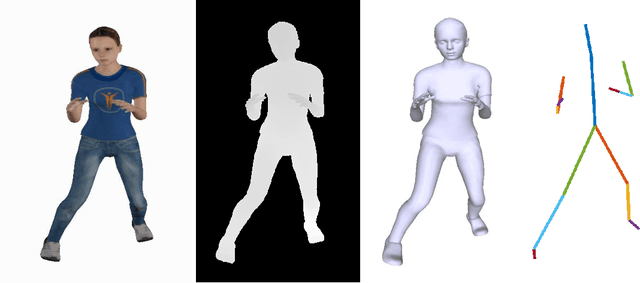
We introduce a synthetic dataset for evaluating non-rigid 3D human reconstruction based on conventional RGB-D cameras. The dataset consist of seven motion sequences of a single human model. For each motion sequence per-frame ground truth geometry and ground truth skeleton are given. The dataset also contains skinning weights of the human model. More information about the dataset can be found at: https://research.csiro.au/robotics/our-work/databases/synthetic-human-model-dataset/
Skeleton Driven Non-rigid Motion Tracking and 3D Reconstruction
Oct 09, 2018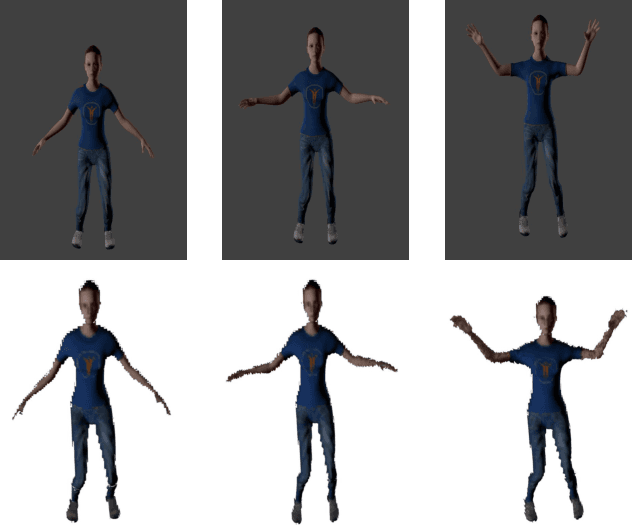
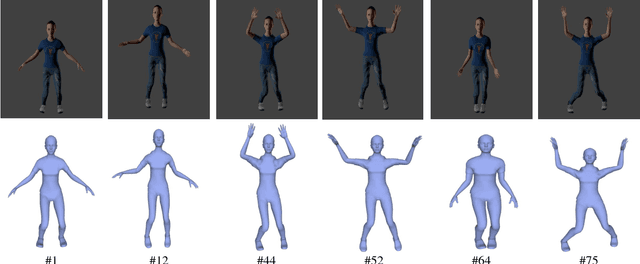
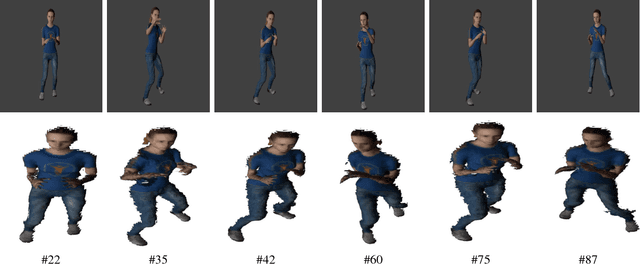
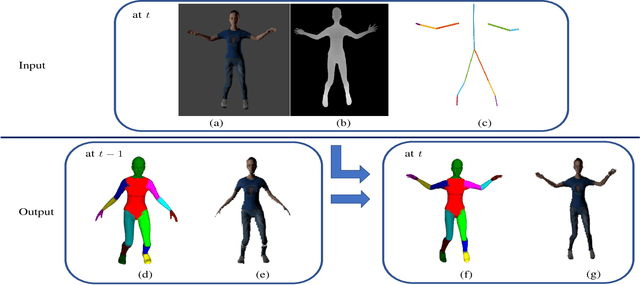
This paper presents a method which can track and 3D reconstruct the non-rigid surface motion of human performance using a moving RGB-D camera. 3D reconstruction of marker-less human performance is a challenging problem due to the large range of articulated motions and considerable non-rigid deformations. Current approaches use local optimization for tracking. These methods need many iterations to converge and may get stuck in local minima during sudden articulated movements. We propose a puppet model-based tracking approach using skeleton prior, which provides a better initialization for tracking articulated movements. The proposed approach uses an aligned puppet model to estimate correct correspondences for human performance capture. We also contribute a synthetic dataset which provides ground truth locations for frame-by-frame geometry and skeleton joints of human subjects. Experimental results show that our approach is more robust when faced with sudden articulated motions, and provides better 3D reconstruction compared to the existing state-of-the-art approaches.
New Feature Detection Mechanism for Extended Kalman Filter Based Monocular SLAM with 1-Point RANSAC
May 31, 2018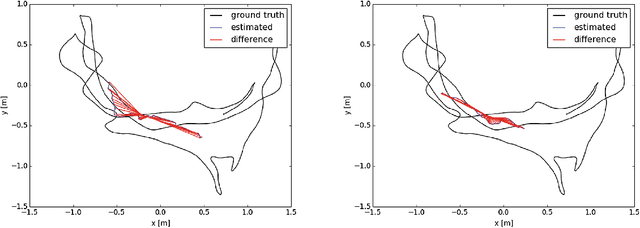
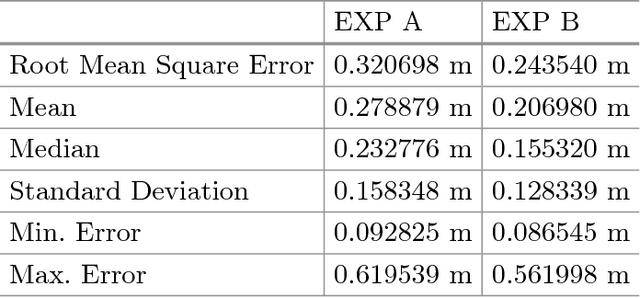
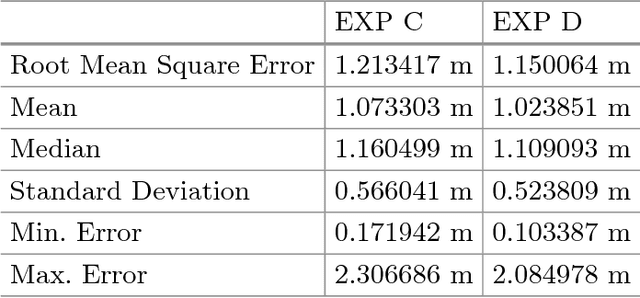
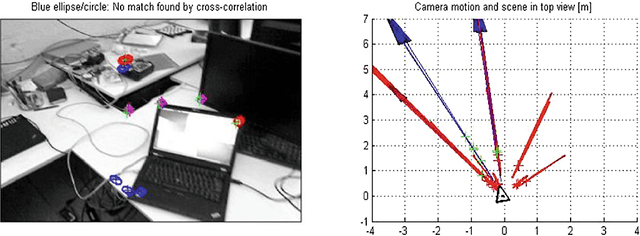
We present a different approach of feature point detection for improving the accuracy of SLAM using single, monocular camera. Traditionally, Harris Corner detection, SURF or FAST corner detectors are used for finding feature points of interest in the image. We replace this with another approach, which involves building a non-linear scale-space representation of images using Perona and Malik Diffusion equation and computing the scale normalized Hessian at multiple scale levels (KAZE feature). The feature points so detected are used to estimate the state and pose of a mono camera using extended Kalman filter. By using accelerated KAZE features and a more rigorous feature rejection routine combined with 1-point RANSAC for outlier rejection, short baseline matching of features are significantly improved, even with a lesser number of feature points, especially in the presence of motion blur. We present a comparative study of our proposal with FAST and show improved localization accuracy in terms of absolute trajectory error.
Non-rigid Reconstruction with a Single Moving RGB-D Camera
May 30, 2018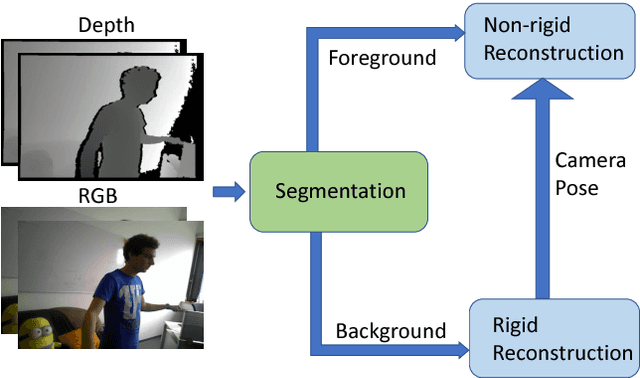
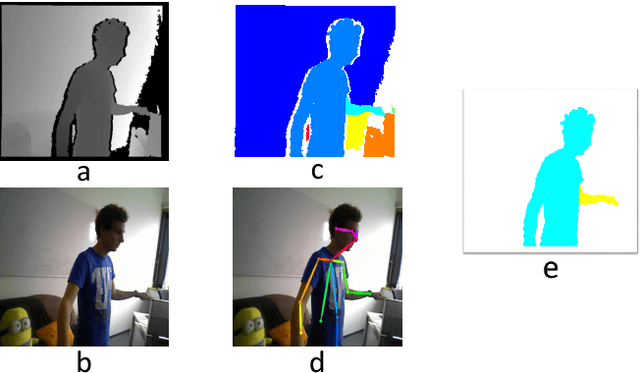
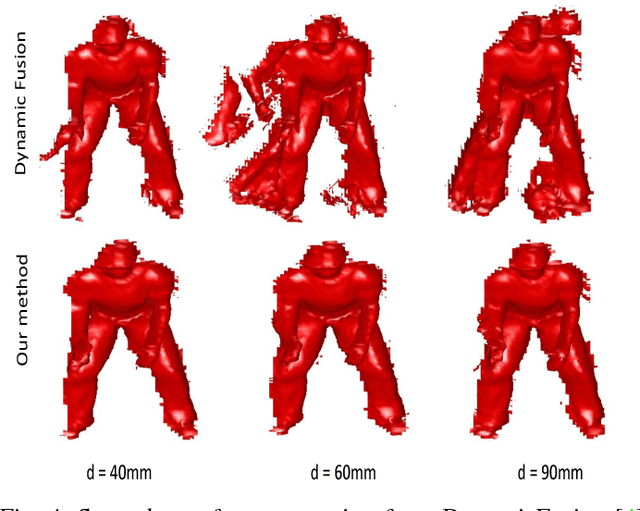
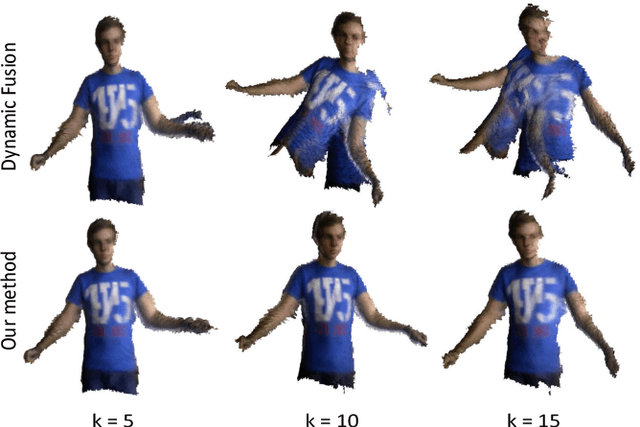
We present a novel non-rigid reconstruction method using a moving RGB-D camera. Current approaches use only non-rigid part of the scene and completely ignore the rigid background. Non-rigid parts often lack sufficient geometric and photometric information for tracking large frame-to-frame motion. Our approach uses camera pose estimated from the rigid background for foreground tracking. This enables robust foreground tracking in situations where large frame-to-frame motion occurs. Moreover, we are proposing a multi-scale deformation graph which improves non-rigid tracking without compromising the quality of the reconstruction. We are also contributing a synthetic dataset which is made publically available for evaluating non-rigid reconstruction methods. The dataset provides frame-by-frame ground truth geometry of the scene, the camera trajectory, and masks for background foreground. Experimental results show that our approach is more robust in handling larger frame-to-frame motions and provides better reconstruction compared to state-of-the-art approaches.