Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Human Model Dataset for Skeleton Driven Non-rigid Motion Tracking and 3D Reconstruction
Paper and Code
Mar 07, 2019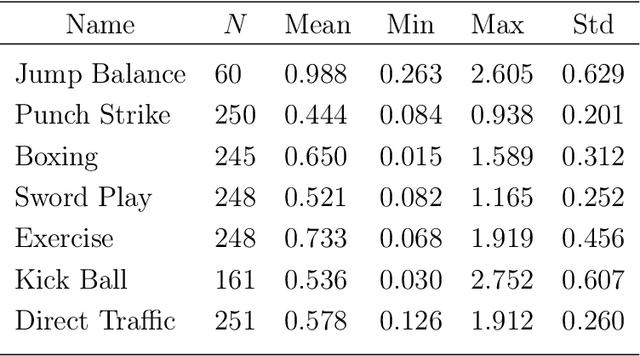
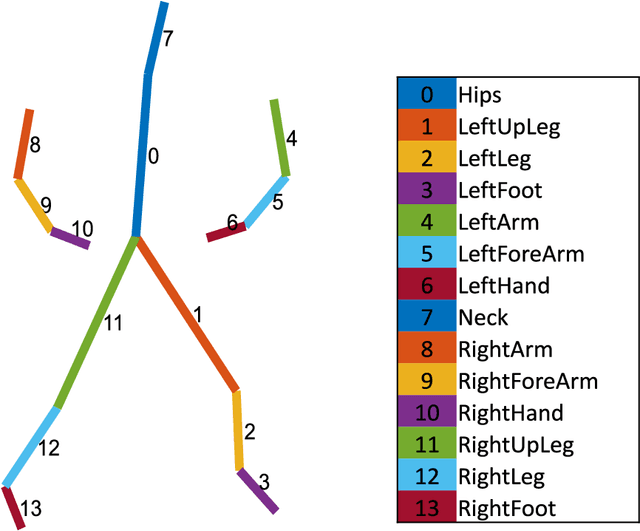
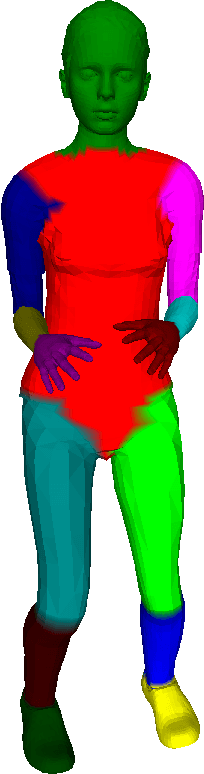
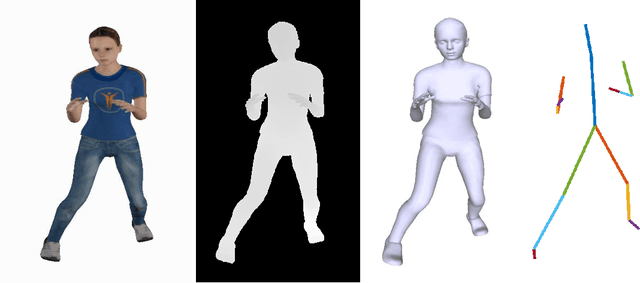
We introduce a synthetic dataset for evaluating non-rigid 3D human reconstruction based on conventional RGB-D cameras. The dataset consist of seven motion sequences of a single human model. For each motion sequence per-frame ground truth geometry and ground truth skeleton are given. The dataset also contains skinning weights of the human model. More information about the dataset can be found at: https://research.csiro.au/robotics/our-work/databases/synthetic-human-model-dataset/
* More information at
https://research.csiro.au/robotics/our-work/databases/synthetic-human-model-dataset/
View paper on