 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizing Shape-from-Template to Topological Changes
Nov 05, 2025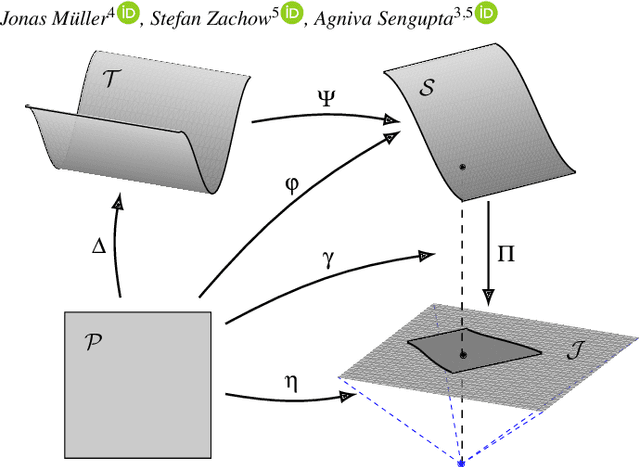



Reconstructing the surfaces of deformable objects from correspondences between a 3D template and a 2D image is well studied under Shape-from-Template (SfT) methods; however, existing approaches break down when topological changes accompany the deformation. We propose a principled extension of SfT that enables reconstruction in the presence of such changes. Our approach is initialized with a classical SfT solution and iteratively adapts the template by partitioning its spatial domain so as to minimize an energy functional that jointly encodes physical plausibility and reprojection consistency. We demonstrate that the method robustly captures a wide range of practically relevant topological events including tears and cuts on bounded 2D surfaces, thereby establishing the first general framework for topological-change-aware SfT. Experiments on both synthetic and real data confirm that our approach consistently outperforms baseline methods.
Convex Relaxations for Isometric and Equiareal NRSfM
Nov 29, 2022
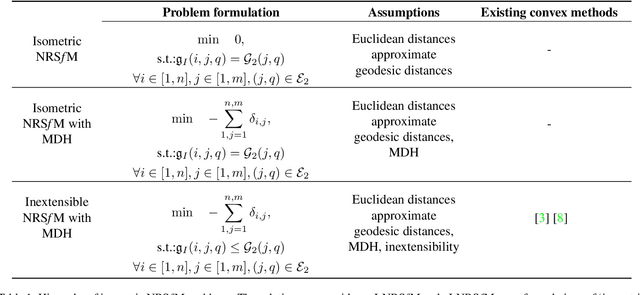

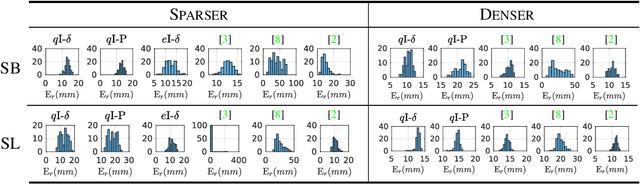
Extensible objects form a challenging case for NRSfM, owing to the lack of a sufficiently constrained extensible model of the point-cloud. We tackle the challenge by proposing 1) convex relaxations of the isometric model up to quasi-isometry, and 2) convex relaxations involving the equiareal deformation model, which preserves local area and has not been used in NRSfM. The equiareal model is appealing because it is physically plausible and widely applicable. However, it has two main difficulties: first, when used on its own, it is ambiguous, and second, it involves quartic, hence highly nonconvex, constraints. Our approach handles the first difficulty by mixing the equiareal with the isometric model and the second difficulty by new convex relaxations. We validate our methods on multiple real and synthetic data, including well-known benchmarks.
New Feature Detection Mechanism for Extended Kalman Filter Based Monocular SLAM with 1-Point RANSAC
May 31, 2018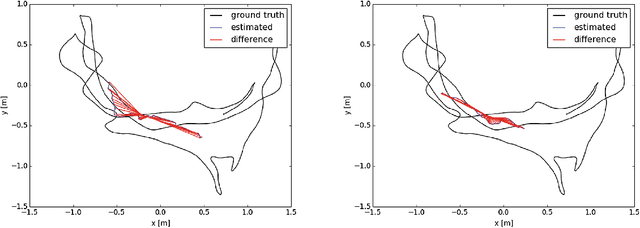
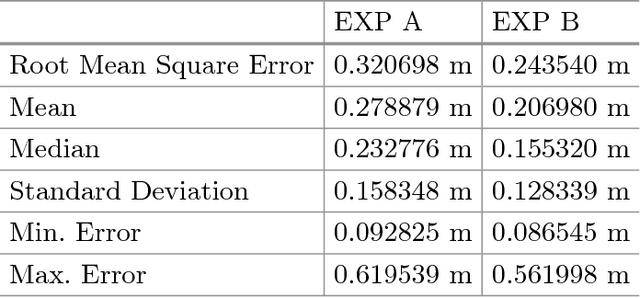
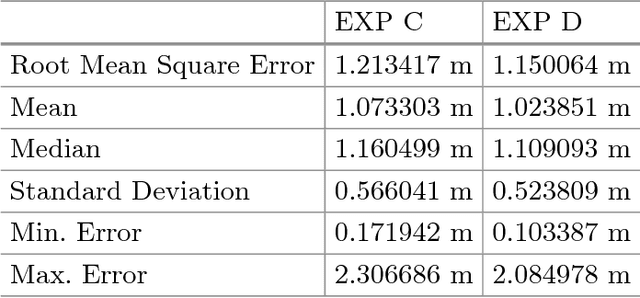
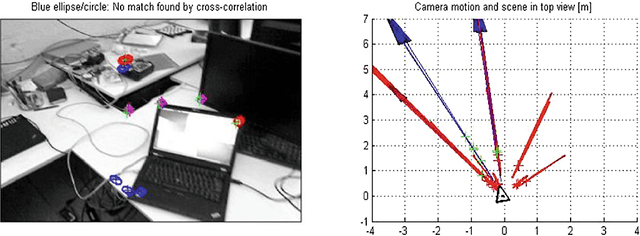
We present a different approach of feature point detection for improving the accuracy of SLAM using single, monocular camera. Traditionally, Harris Corner detection, SURF or FAST corner detectors are used for finding feature points of interest in the image. We replace this with another approach, which involves building a non-linear scale-space representation of images using Perona and Malik Diffusion equation and computing the scale normalized Hessian at multiple scale levels (KAZE feature). The feature points so detected are used to estimate the state and pose of a mono camera using extended Kalman filter. By using accelerated KAZE features and a more rigorous feature rejection routine combined with 1-point RANSAC for outlier rejection, short baseline matching of features are significantly improved, even with a lesser number of feature points, especially in the presence of motion blur. We present a comparative study of our proposal with FAST and show improved localization accuracy in terms of absolute trajectory error.