 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNew Feature Detection Mechanism for Extended Kalman Filter Based Monocular SLAM with 1-Point RANSAC
Paper and Code
May 31, 2018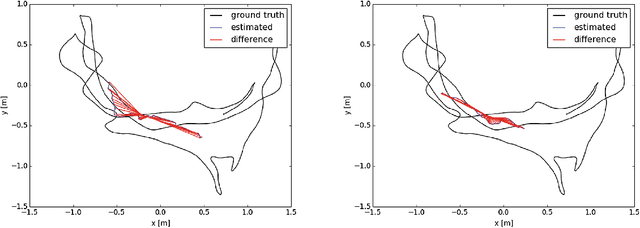
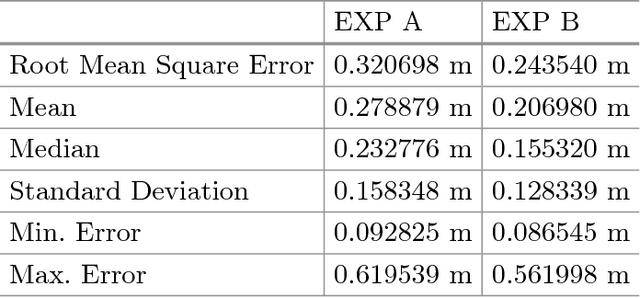
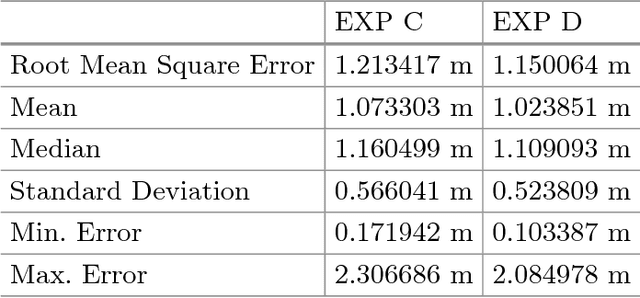
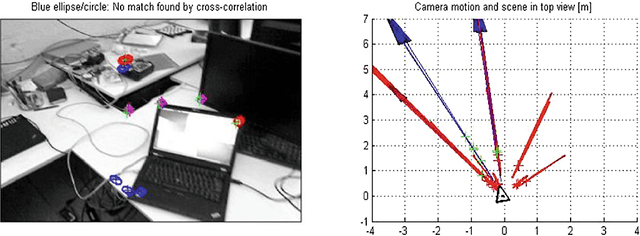
We present a different approach of feature point detection for improving the accuracy of SLAM using single, monocular camera. Traditionally, Harris Corner detection, SURF or FAST corner detectors are used for finding feature points of interest in the image. We replace this with another approach, which involves building a non-linear scale-space representation of images using Perona and Malik Diffusion equation and computing the scale normalized Hessian at multiple scale levels (KAZE feature). The feature points so detected are used to estimate the state and pose of a mono camera using extended Kalman filter. By using accelerated KAZE features and a more rigorous feature rejection routine combined with 1-point RANSAC for outlier rejection, short baseline matching of features are significantly improved, even with a lesser number of feature points, especially in the presence of motion blur. We present a comparative study of our proposal with FAST and show improved localization accuracy in terms of absolute trajectory error.