 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerspectives on Sim2Real Transfer for Robotics: A Summary of the R:SS 2020 Workshop
Dec 07, 2020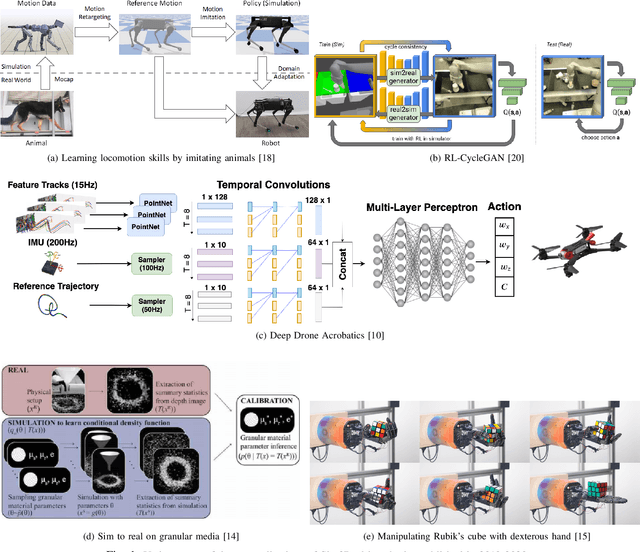
This report presents the debates, posters, and discussions of the Sim2Real workshop held in conjunction with the 2020 edition of the "Robotics: Science and System" conference. Twelve leaders of the field took competing debate positions on the definition, viability, and importance of transferring skills from simulation to the real world in the context of robotics problems. The debaters also joined a large panel discussion, answering audience questions and outlining the future of Sim2Real in robotics. Furthermore, we invited extended abstracts to this workshop which are summarized in this report. Based on the workshop, this report concludes with directions for practitioners exploiting this technology and for researchers further exploring open problems in this area.
Patterns for Learning with Side Information
Feb 10, 2016

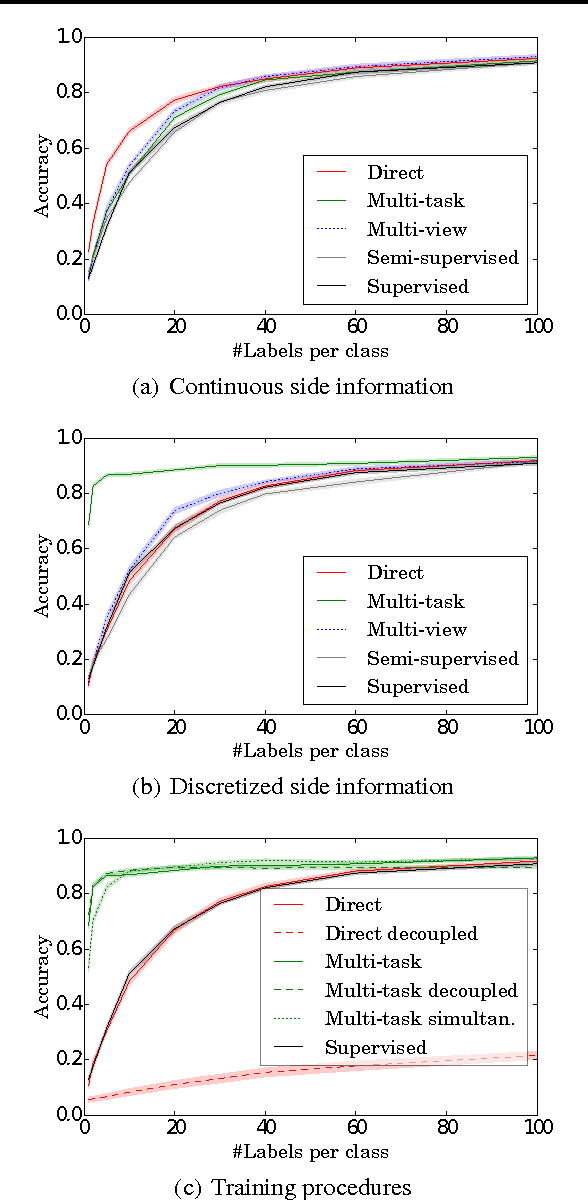

Supervised, semi-supervised, and unsupervised learning estimate a function given input/output samples. Generalization of the learned function to unseen data can be improved by incorporating side information into learning. Side information are data that are neither from the input space nor from the output space of the function, but include useful information for learning it. In this paper we show that learning with side information subsumes a variety of related approaches, e.g. multi-task learning, multi-view learning and learning using privileged information. Our main contributions are (i) a new perspective that connects these previously isolated approaches, (ii) insights about how these methods incorporate different types of prior knowledge, and hence implement different patterns, (iii) facilitating the application of these methods in novel tasks, as well as (iv) a systematic experimental evaluation of these patterns in two supervised learning tasks.
Cavlectometry: Towards Holistic Reconstruction of Large Mirror Objects
Sep 14, 2014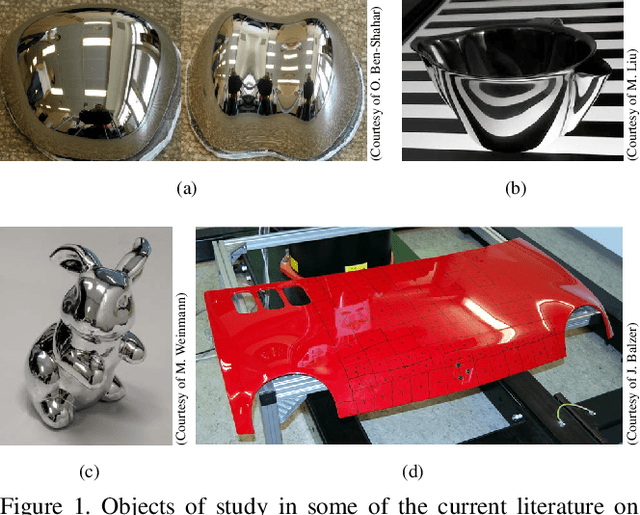


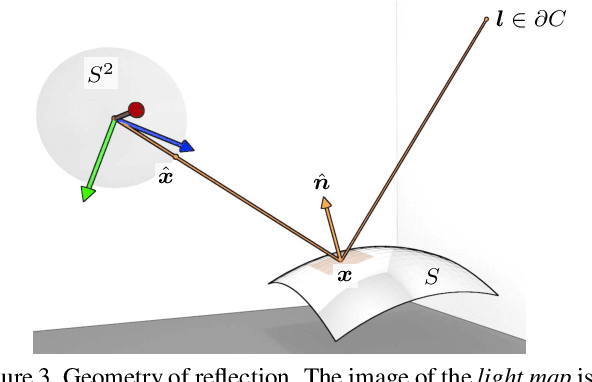
We introduce a method based on the deflectometry principle for the reconstruction of specular objects exhibiting significant size and geometric complexity. A key feature of our approach is the deployment of an Automatic Virtual Environment (CAVE) as pattern generator. To unfold the full power of this extraordinary experimental setup, an optical encoding scheme is developed which accounts for the distinctive topology of the CAVE. Furthermore, we devise an algorithm for detecting the object of interest in raw deflectometric images. The segmented foreground is used for single-view reconstruction, the background for estimation of the camera pose, necessary for calibrating the sensor system. Experiments suggest a significant gain of coverage in single measurements compared to previous methods. To facilitate research on specular surface reconstruction, we will make our data set publicly available.