 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUruBots Autonomous Cars Challenge Pro Team Description Paper for FIRA 2025
Jun 09, 2025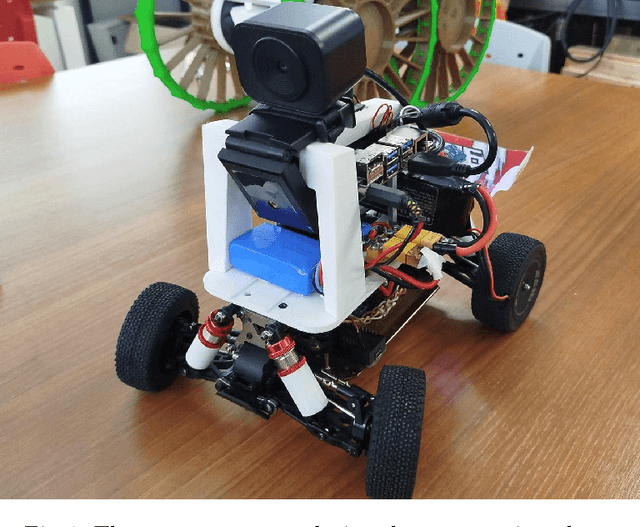
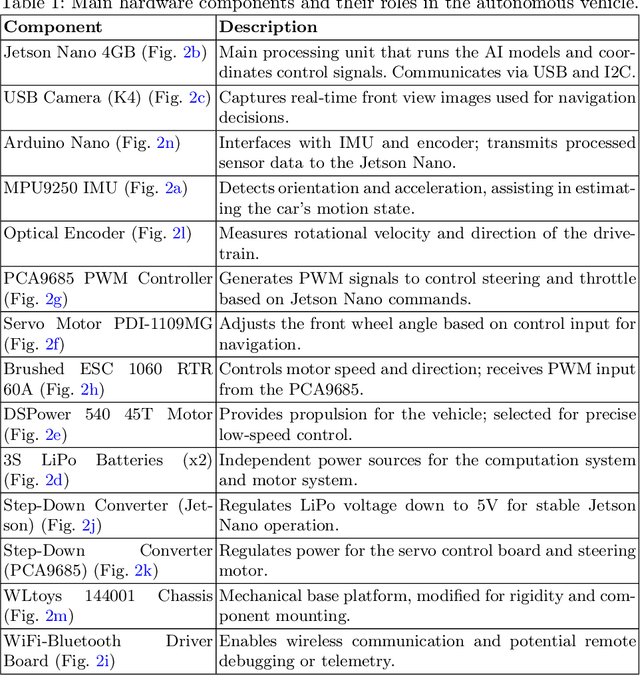
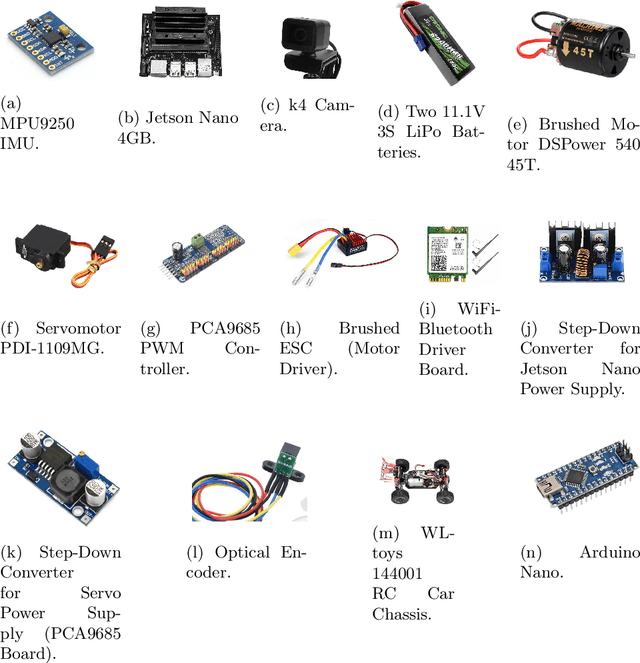
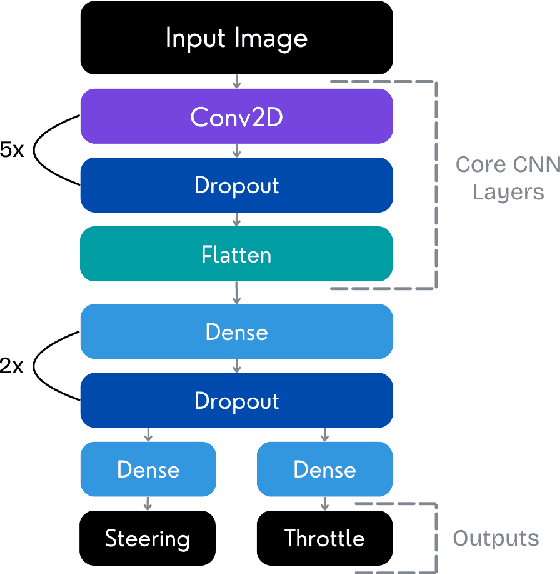
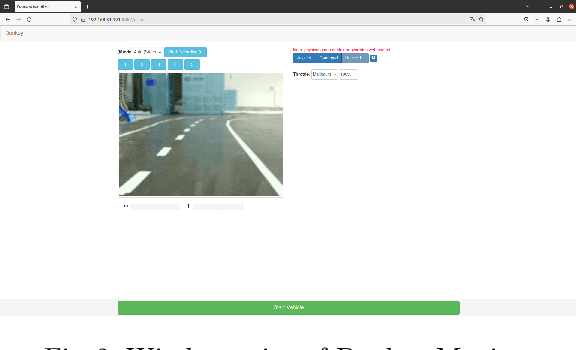
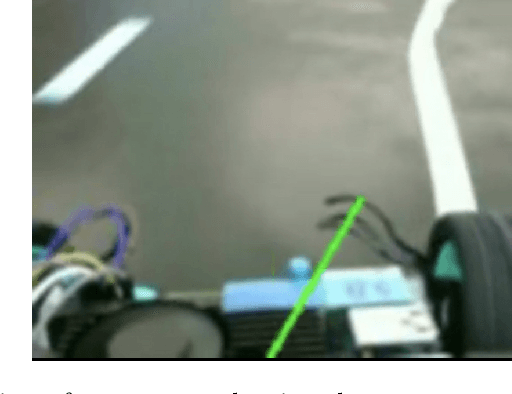
This paper describes the development of an autonomous car by the UruBots team for the 2025 FIRA Autonomous Cars Challenge (Pro). The project involves constructing a compact electric vehicle, approximately the size of an RC car, capable of autonomous navigation through different tracks. The design incorporates mechanical and electronic components and machine learning algorithms that enable the vehicle to make real-time navigation decisions based on visual input from a camera. We use deep learning models to process camera images and control vehicle movements. Using a dataset of over ten thousand images, we trained a Convolutional Neural Network (CNN) to drive the vehicle effectively, through two outputs, steering and throttle. The car completed the track in under 30 seconds, achieving a pace of approximately 0.4 meters per second while avoiding obstacles.
RoboCup Rescue 2025 Team Description Paper UruBots
Apr 14, 2025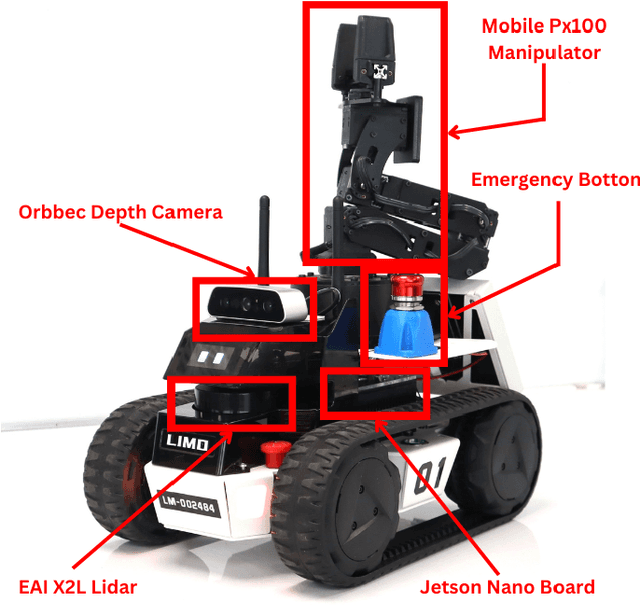
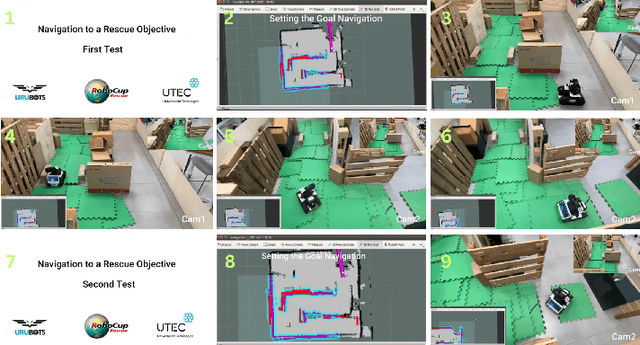
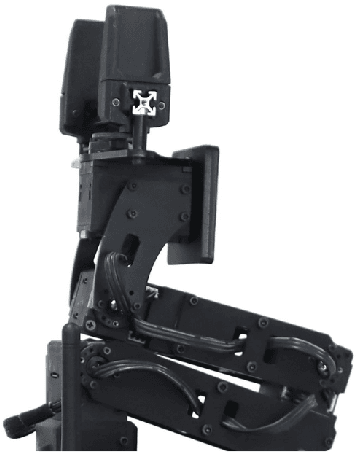
This paper describes the approach used by Team UruBots for participation in the 2025 RoboCup Rescue Robot League competition. Our team aims to participate for the first time in this competition at RoboCup, using experience learned from previous competitions and research. We present our vehicle and our approach to tackle the task of detecting and finding victims in search and rescue environments. Our approach contains known topics in robotics, such as ROS, SLAM, Human Robot Interaction and segmentation and perception. Our proposed approach is open source, available to the RoboCup Rescue community, where we aim to learn and contribute to the league.
UruBots RoboCup Work Team Description Paper
Apr 13, 2025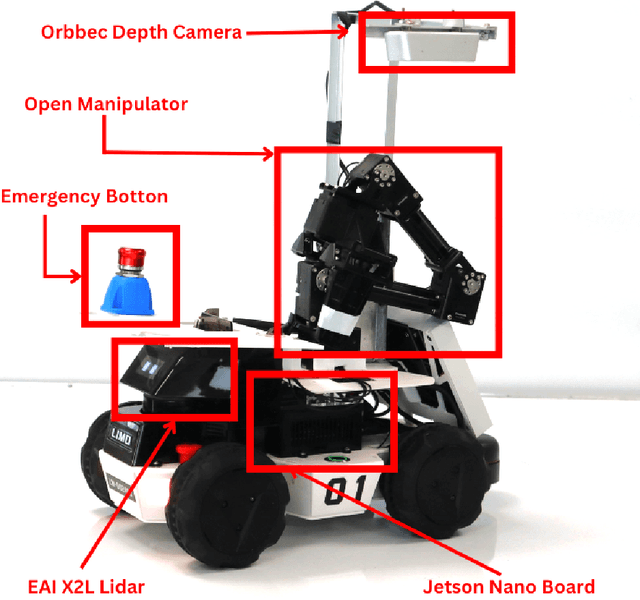
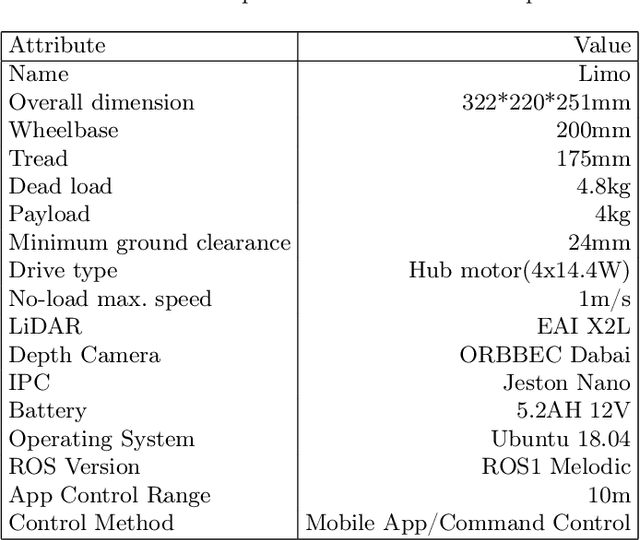
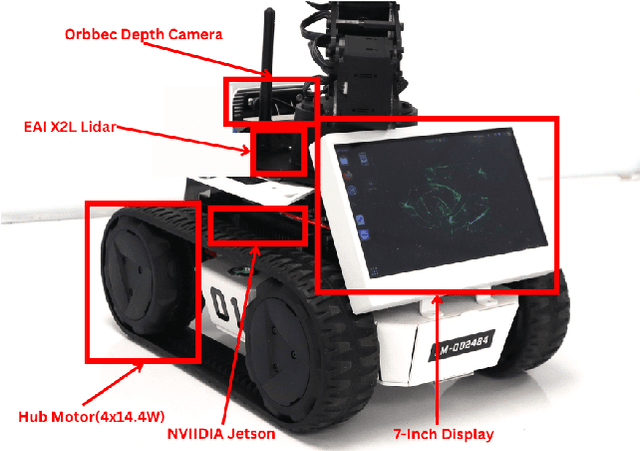
This work presents a team description paper for the RoboCup Work League. Our team, UruBots, has been developing robots and projects for research and competitions in the last three years, attending robotics competitions in Uruguay and around the world. In this instance, we aim to participate and contribute to the RoboCup Work category, hopefully making our debut in this prestigious competition. For that, we present an approach based on the Limo robot, whose main characteristic is its hybrid locomotion system with wheels and tracks, with some extras added by the team to complement the robot's functionalities. Overall, our approach allows the robot to efficiently and autonomously navigate a Work scenario, with the ability to manipulate objects, perform autonomous navigation, and engage in a simulated industrial environment.
Implementación de Navegación en Plataforma Robótica Móvil Basada en ROS y Gazebo
Oct 25, 2024This research focused on utilizing ROS2 and Gazebo for simulating the TurtleBot3 robot, with the aim of exploring autonomous navigation capabilities. While the study did not achieve full autonomous navigation, it successfully established the connection between ROS2 and Gazebo and enabled manual simulation of the robot's movements. The primary objective was to understand how these tools can be integrated to support autonomous functions, providing valuable insights into the development process. The results of this work lay the groundwork for future research into autonomous robotics. The topic is particularly engaging for both teenagers and adults interested in discovering how robots function independently and the underlying technology involved. This research highlights the potential for further advancements in autonomous systems and serves as a stepping stone for more in-depth studies in the field.
Configuração e operação da plataforma Clearpath Husky A200 e Manipulador Cobot UR5 2-Finger Gripper
Oct 22, 2024This article presents initial configuration work and use of the robotic platform and manipulator in question. The development of the ideal configuration for using this robot serves as a guide for new users and also validates its functionality for use in projects. Husky is a large payload capacity and power systems robotics development platform that accommodates a wide variety of payloads, customized to meet research needs. Together with the Cobot UR5 Manipulator attached to its base, it expands the application area of its capacity in projects. Advances in robots and mobile manipulators have revolutionized industries by automating tasks that previously required human intervention. These innovations alone increase productivity but also reduce operating costs, which makes the company more competitive in an evolving global market. Therefore, this article investigates the functionalities of this robot to validate its execution in robotics projects.
UruBots Autonomous Car Team Two: Team Description Paper for FIRA 2024
Jun 13, 2024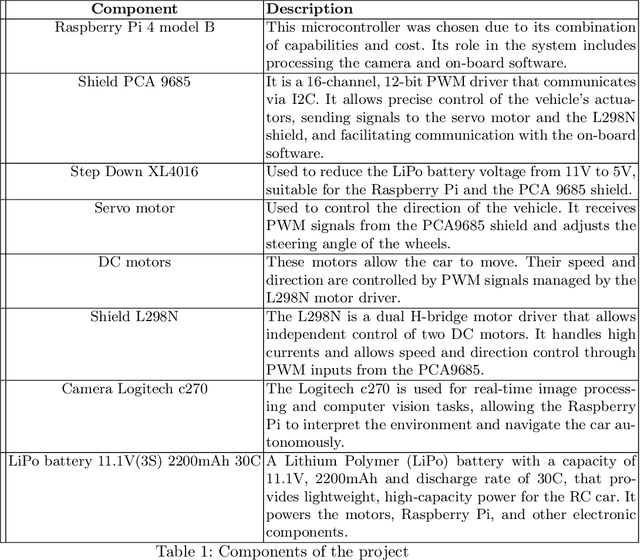

This paper proposes a mini autonomous car to be used by the team UruBots for the 2024 FIRA Autonomous Cars Race Challenge. The vehicle is proposed focusing on a low cost and light weight setup. Powered by a Raspberry PI4 and with a total weight of 1.15 Kilograms, we show that our vehicle manages to race a track of approximately 13 meters in 11 seconds at the best evaluation that was carried out, with an average speed of 1.2m/s in average. That performance was achieved after training a convolutional neural network with 1500 samples for a total amount of 60 epochs. Overall, we believe that our vehicle are suited to perform at the FIRA Autonomous Cars Race Challenge 2024, helping the development of the field of study and the category in the competition.
UruBots Autonomous Cars Team One Description Paper for FIRA 2024
Jun 13, 2024This document presents the design of an autonomous car developed by the UruBots team for the 2024 FIRA Autonomous Cars Race Challenge. The project involves creating an RC-car sized electric vehicle capable of navigating race tracks with in an autonomous manner. It integrates mechanical and electronic systems alongside artificial intelligence based algorithms for the navigation and real-time decision-making. The core of our project include the utilization of an AI-based algorithm to learn information from a camera and act in the robot to perform the navigation. We show that by creating a dataset with more than five thousand samples and a five-layered CNN we managed to achieve promissing performance we our proposed hardware setup. Overall, this paper aims to demonstrate the autonomous capabilities of our car, highlighting its readiness for the 2024 FIRA challenge, helping to contribute to the field of autonomous vehicle research.
UruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024
Jun 13, 2024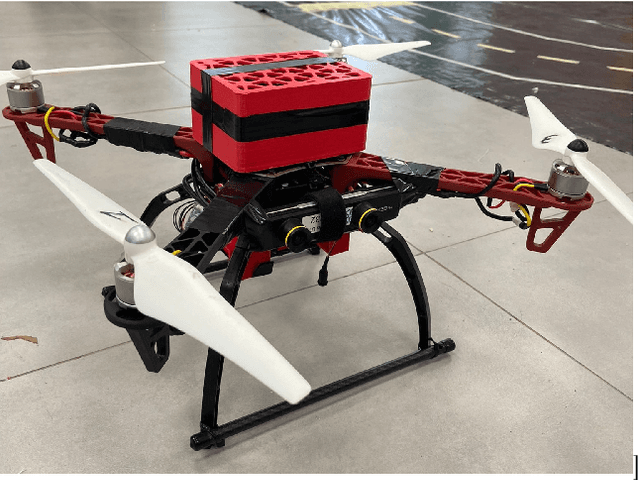
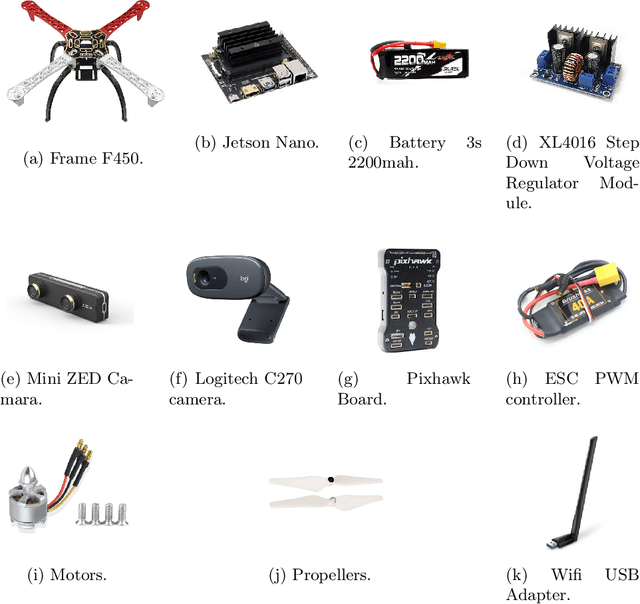
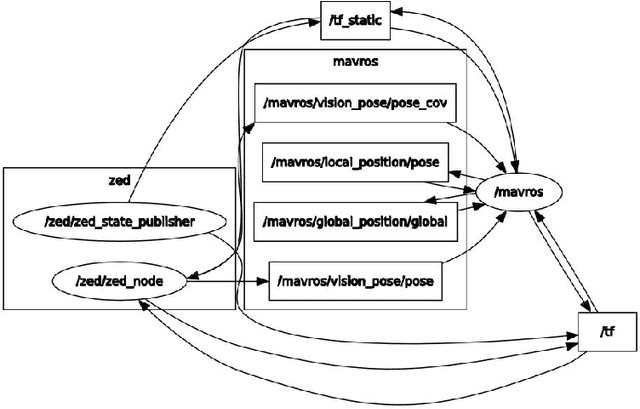
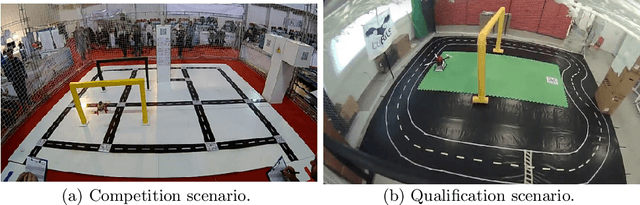
This document addresses the description of the corresponding "Urubots" Team for the 2024 Fira Air League, "Air Emergency Service (Indoor)." We introduce our team and an autonomous Unmanned Aerial Vehicle (UAV) that relies on computer vision for its flight control. This UAV has the capability to perform a wide variety of navigation tasks in indoor environments, without requiring the intervention of an external operator or any form of external processing, resulting in a significant decrease in workload and manual dependence. Additionally, our software has been designed to be compatible with the vehicle's structure and for its application to the competition circuit. In this paper, we detail additional aspects about the mechanical structure, software, and application to the FIRA competition.