 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUruBots Autonomous Cars Challenge Pro Team Description Paper for FIRA 2025
Jun 09, 2025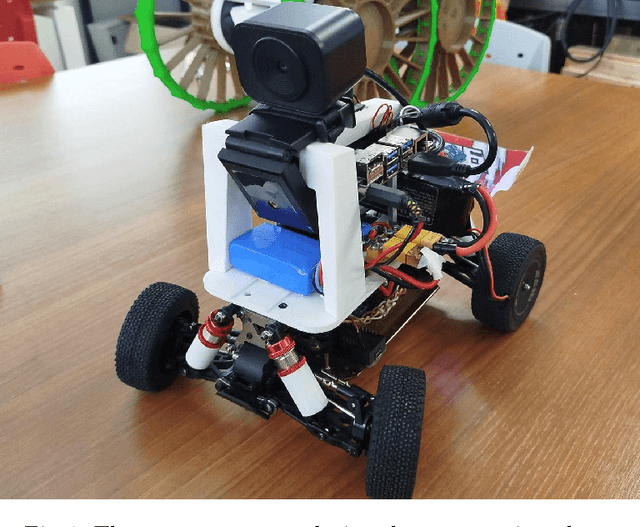
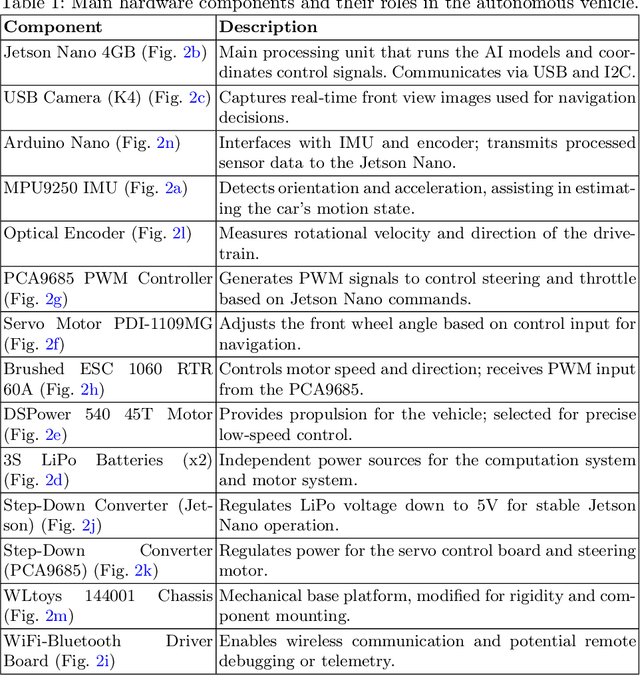
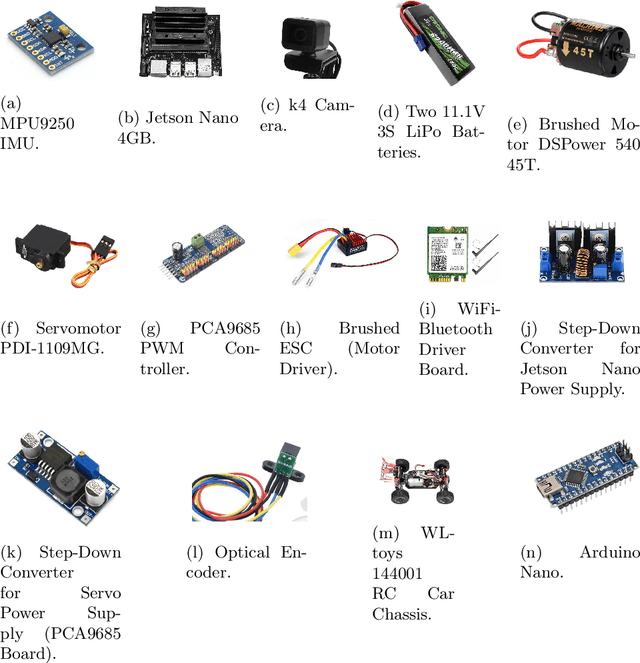
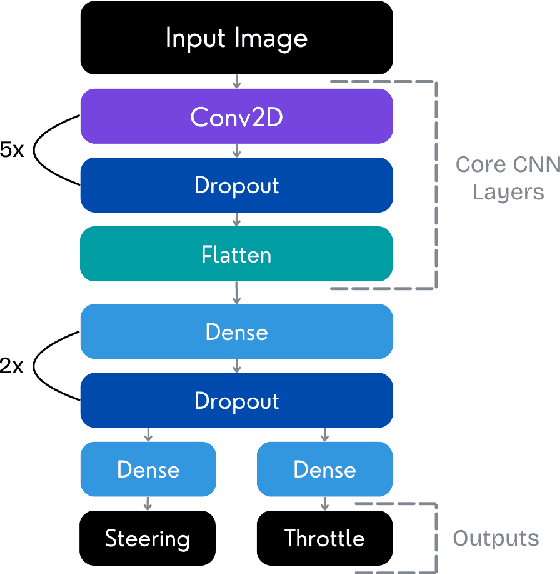
This paper describes the development of an autonomous car by the UruBots team for the 2025 FIRA Autonomous Cars Challenge (Pro). The project involves constructing a compact electric vehicle, approximately the size of an RC car, capable of autonomous navigation through different tracks. The design incorporates mechanical and electronic components and machine learning algorithms that enable the vehicle to make real-time navigation decisions based on visual input from a camera. We use deep learning models to process camera images and control vehicle movements. Using a dataset of over ten thousand images, we trained a Convolutional Neural Network (CNN) to drive the vehicle effectively, through two outputs, steering and throttle. The car completed the track in under 30 seconds, achieving a pace of approximately 0.4 meters per second while avoiding obstacles.
RoboCup Rescue 2025 Team Description Paper UruBots
Apr 14, 2025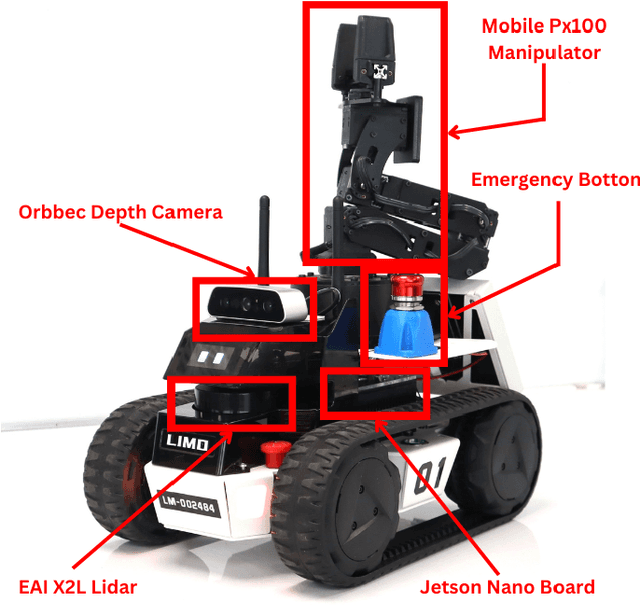
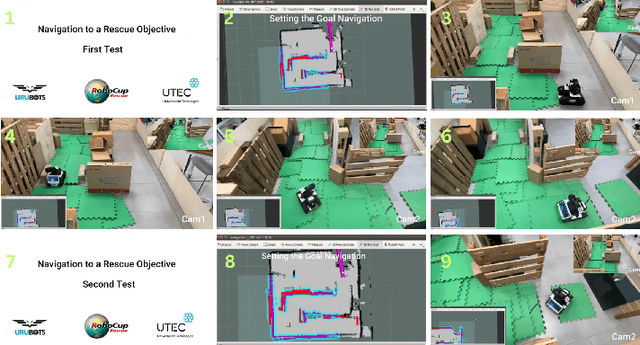
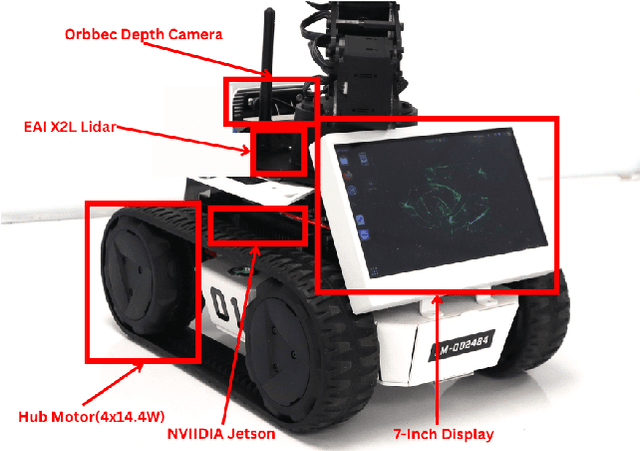
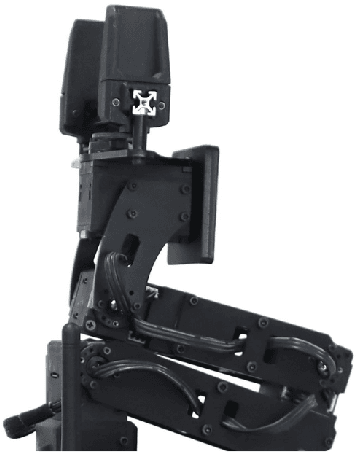
This paper describes the approach used by Team UruBots for participation in the 2025 RoboCup Rescue Robot League competition. Our team aims to participate for the first time in this competition at RoboCup, using experience learned from previous competitions and research. We present our vehicle and our approach to tackle the task of detecting and finding victims in search and rescue environments. Our approach contains known topics in robotics, such as ROS, SLAM, Human Robot Interaction and segmentation and perception. Our proposed approach is open source, available to the RoboCup Rescue community, where we aim to learn and contribute to the league.
UruBots RoboCup Work Team Description Paper
Apr 13, 2025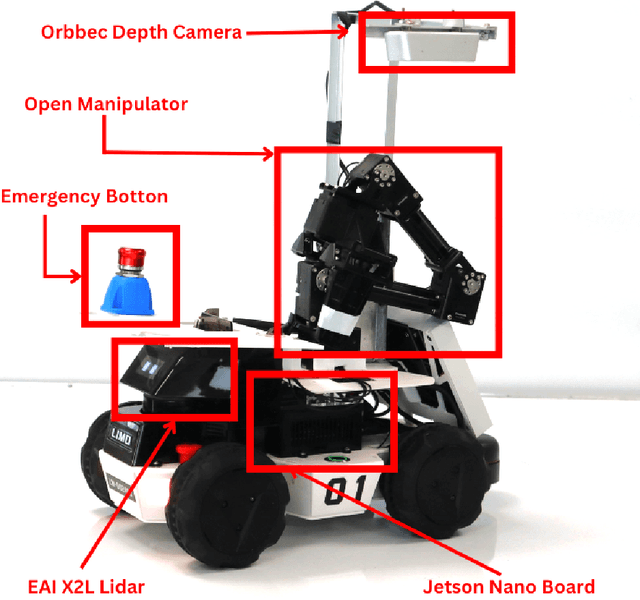
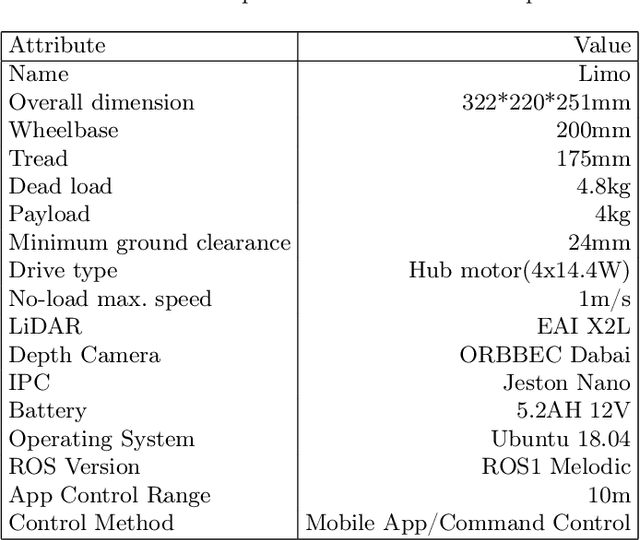
This work presents a team description paper for the RoboCup Work League. Our team, UruBots, has been developing robots and projects for research and competitions in the last three years, attending robotics competitions in Uruguay and around the world. In this instance, we aim to participate and contribute to the RoboCup Work category, hopefully making our debut in this prestigious competition. For that, we present an approach based on the Limo robot, whose main characteristic is its hybrid locomotion system with wheels and tracks, with some extras added by the team to complement the robot's functionalities. Overall, our approach allows the robot to efficiently and autonomously navigate a Work scenario, with the ability to manipulate objects, perform autonomous navigation, and engage in a simulated industrial environment.
Multi-Dimensional Recurrent Neural Networks
May 14, 2007



Recurrent neural networks (RNNs) have proved effective at one dimensional sequence learning tasks, such as speech and online handwriting recognition. Some of the properties that make RNNs suitable for such tasks, for example robustness to input warping, and the ability to access contextual information, are also desirable in multidimensional domains. However, there has so far been no direct way of applying RNNs to data with more than one spatio-temporal dimension. This paper introduces multi-dimensional recurrent neural networks (MDRNNs), thereby extending the potential applicability of RNNs to vision, video processing, medical imaging and many other areas, while avoiding the scaling problems that have plagued other multi-dimensional models. Experimental results are provided for two image segmentation tasks.