 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUruBots RoboCup Work Team Description Paper
Paper and Code
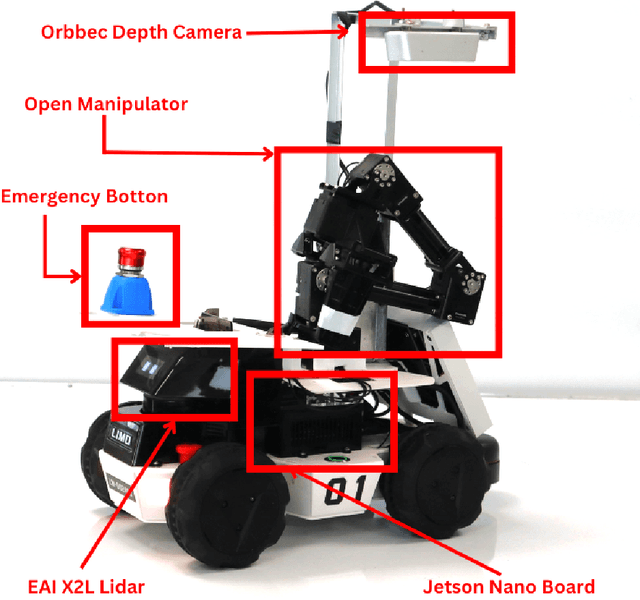
This work presents a team description paper for the RoboCup Work League. Our team, UruBots, has been developing robots and projects for research and competitions in the last three years, attending robotics competitions in Uruguay and around the world. In this instance, we aim to participate and contribute to the RoboCup Work category, hopefully making our debut in this prestigious competition. For that, we present an approach based on the Limo robot, whose main characteristic is its hybrid locomotion system with wheels and tracks, with some extras added by the team to complement the robot's functionalities. Overall, our approach allows the robot to efficiently and autonomously navigate a Work scenario, with the ability to manipulate objects, perform autonomous navigation, and engage in a simulated industrial environment.