Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCup Rescue 2025 Team Description Paper UruBots
Apr 14, 2025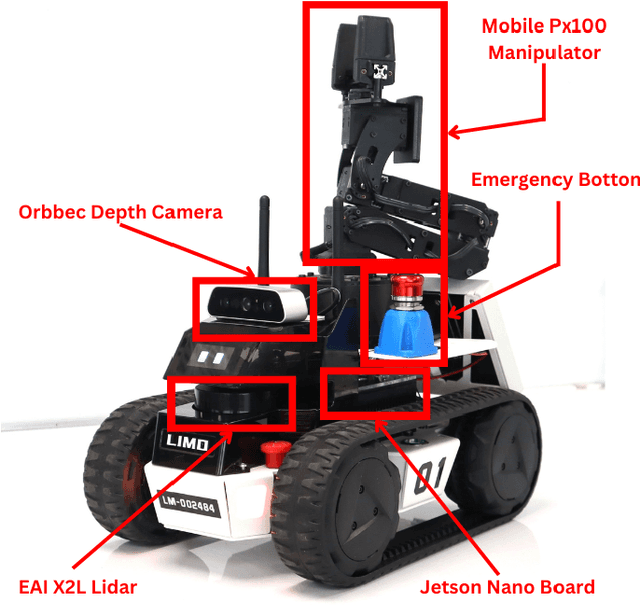
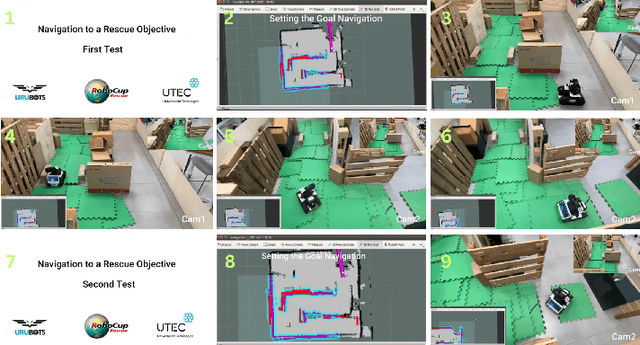
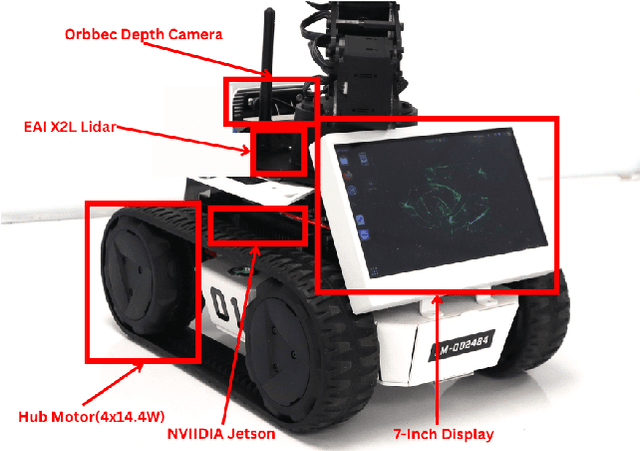
This paper describes the approach used by Team UruBots for participation in the 2025 RoboCup Rescue Robot League competition. Our team aims to participate for the first time in this competition at RoboCup, using experience learned from previous competitions and research. We present our vehicle and our approach to tackle the task of detecting and finding victims in search and rescue environments. Our approach contains known topics in robotics, such as ROS, SLAM, Human Robot Interaction and segmentation and perception. Our proposed approach is open source, available to the RoboCup Rescue community, where we aim to learn and contribute to the league.
Via