 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024
Jun 13, 2024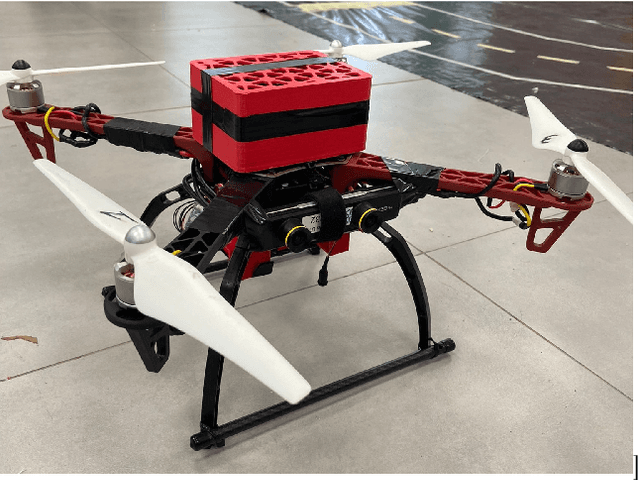
This document addresses the description of the corresponding "Urubots" Team for the 2024 Fira Air League, "Air Emergency Service (Indoor)." We introduce our team and an autonomous Unmanned Aerial Vehicle (UAV) that relies on computer vision for its flight control. This UAV has the capability to perform a wide variety of navigation tasks in indoor environments, without requiring the intervention of an external operator or any form of external processing, resulting in a significant decrease in workload and manual dependence. Additionally, our software has been designed to be compatible with the vehicle's structure and for its application to the competition circuit. In this paper, we detail additional aspects about the mechanical structure, software, and application to the FIRA competition.