 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementación de Navegación en Plataforma Robótica Móvil Basada en ROS y Gazebo
Oct 25, 2024This research focused on utilizing ROS2 and Gazebo for simulating the TurtleBot3 robot, with the aim of exploring autonomous navigation capabilities. While the study did not achieve full autonomous navigation, it successfully established the connection between ROS2 and Gazebo and enabled manual simulation of the robot's movements. The primary objective was to understand how these tools can be integrated to support autonomous functions, providing valuable insights into the development process. The results of this work lay the groundwork for future research into autonomous robotics. The topic is particularly engaging for both teenagers and adults interested in discovering how robots function independently and the underlying technology involved. This research highlights the potential for further advancements in autonomous systems and serves as a stepping stone for more in-depth studies in the field.
UruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024
Jun 13, 2024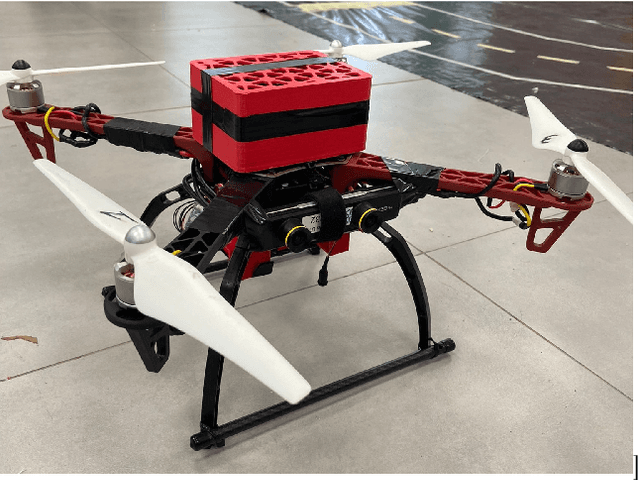
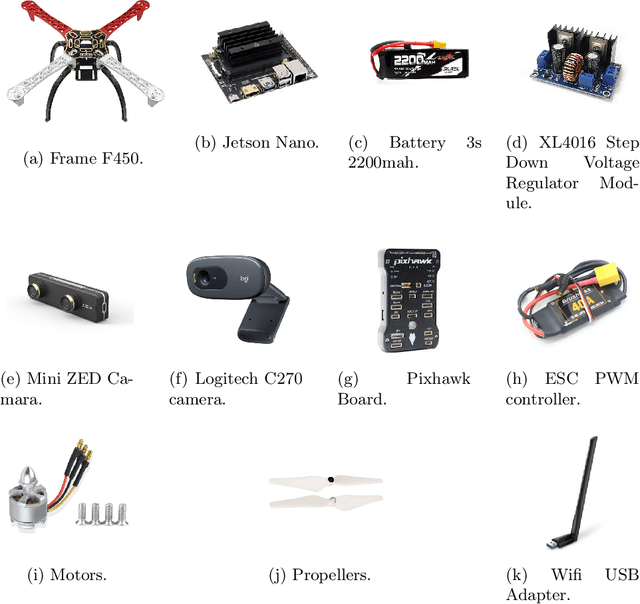
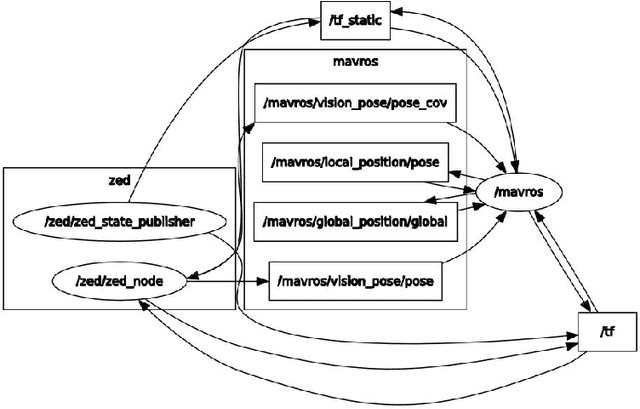
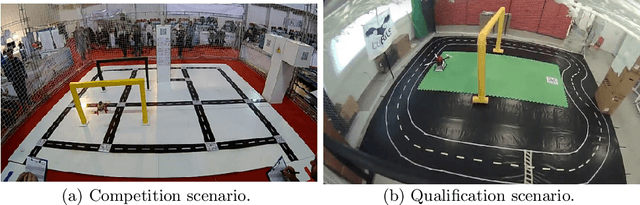
This document addresses the description of the corresponding "Urubots" Team for the 2024 Fira Air League, "Air Emergency Service (Indoor)." We introduce our team and an autonomous Unmanned Aerial Vehicle (UAV) that relies on computer vision for its flight control. This UAV has the capability to perform a wide variety of navigation tasks in indoor environments, without requiring the intervention of an external operator or any form of external processing, resulting in a significant decrease in workload and manual dependence. Additionally, our software has been designed to be compatible with the vehicle's structure and for its application to the competition circuit. In this paper, we detail additional aspects about the mechanical structure, software, and application to the FIRA competition.