 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser Selection in Near-Field Gigantic MIMO Systems with Modular Arrays
Jan 10, 2025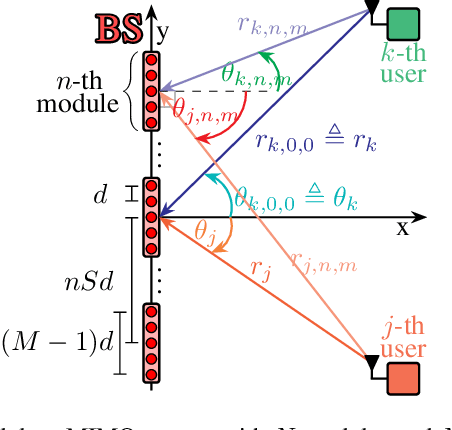
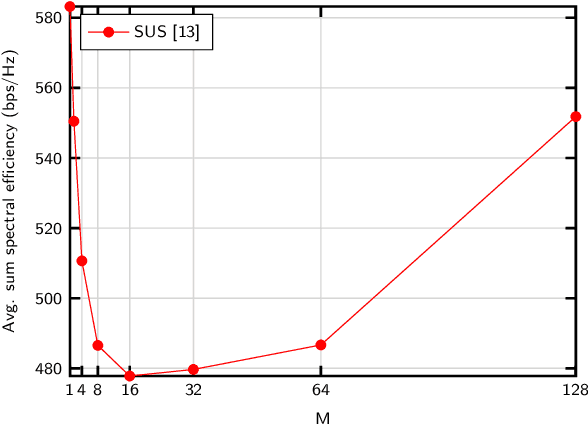
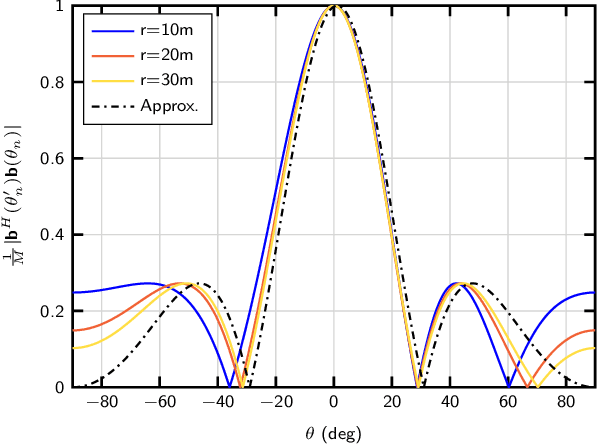
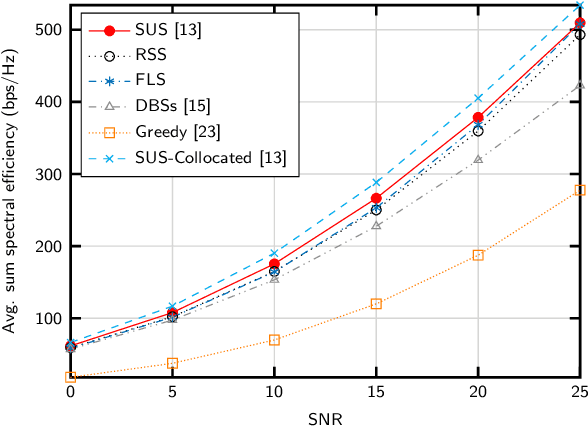
Modular Arrays (MAs) are a promising architecture to enable multi-user communications in next-generation multiple-input multiple-output (MIMO) systems based on extra-large (XL) or gigantic MIMO (gMIMO) deployments, trading off an improved spatial resolution with characteristic interference patterns associated to grating lobes. In this work, we analyze whether MAs can outperform conventional collocated deployments, in terms of achievable sum-rate and served users in a multi-user downlink set-up. First, we provide a rigorous analytical characterization of the inter-user interference for modular gMIMO systems operating in the near field. Then, we leverage these results to optimize the user selection and precoding mechanisms, designing two algorithms that largely outperform existing alternatives in the literature, with different algorithmic complexities. Results show that the proposed algorithms yield over 70% improvements in achievable sum-spectral efficiencies compared to the state of the art. We also illustrate how MAs allow to serve a larger number of users thanks to their improved spatial resolution, compared to the collocated counterpart.
How Should One Fit Channel Measurements to Fading Distributions for Performance Analysis?
Dec 04, 2024Accurate channel modeling plays a pivotal role in optimizing communication systems, especially as new frequency bands come into play in next-generation networks. In this regard, fitting field measurements to stochastic models is crucial for capturing the key propagation features and to map these to achievable system performances. In this work, we shed light onto what's the most appropriate alternative for channel fitting, when the ultimate goal is performance analysis. Results show that average-error metrics should be used with caution, since they can largely fail to predict outage probability measures. We show that supremum-error fitting metrics with tail awareness are more robust to estimate both ergodic and outage performance measures, even when they yield a larger average-error fitting.
Implementación de Navegación en Plataforma Robótica Móvil Basada en ROS y Gazebo
Oct 25, 2024This research focused on utilizing ROS2 and Gazebo for simulating the TurtleBot3 robot, with the aim of exploring autonomous navigation capabilities. While the study did not achieve full autonomous navigation, it successfully established the connection between ROS2 and Gazebo and enabled manual simulation of the robot's movements. The primary objective was to understand how these tools can be integrated to support autonomous functions, providing valuable insights into the development process. The results of this work lay the groundwork for future research into autonomous robotics. The topic is particularly engaging for both teenagers and adults interested in discovering how robots function independently and the underlying technology involved. This research highlights the potential for further advancements in autonomous systems and serves as a stepping stone for more in-depth studies in the field.
Configuração e operação da plataforma Clearpath Husky A200 e Manipulador Cobot UR5 2-Finger Gripper
Oct 22, 2024This article presents initial configuration work and use of the robotic platform and manipulator in question. The development of the ideal configuration for using this robot serves as a guide for new users and also validates its functionality for use in projects. Husky is a large payload capacity and power systems robotics development platform that accommodates a wide variety of payloads, customized to meet research needs. Together with the Cobot UR5 Manipulator attached to its base, it expands the application area of its capacity in projects. Advances in robots and mobile manipulators have revolutionized industries by automating tasks that previously required human intervention. These innovations alone increase productivity but also reduce operating costs, which makes the company more competitive in an evolving global market. Therefore, this article investigates the functionalities of this robot to validate its execution in robotics projects.
De la Extensión a la Investigación: Como La Robótica Estimula el Interés Académico en Estudiantes de Grado
Oct 22, 2024This research examines the impact of robotics groups in higher education, focusing on how these activities influence the development of transversal skills and academic motivation. While robotics goes beyond just technical knowledge, participation in these groups has been observed to significantly improve skills such as teamwork, creativity, and problem-solving. The study, conducted with the UruBots group, shows that students involved in robotics not only reinforce their theoretical knowledge but also increase their interest in research and academic commitment. These results highlight the potential of educational robotics to transform the learning experience by promoting active and collaborative learning. This work lays the groundwork for future research on how robotics can continue to enhance higher education and motivate students in their academic and professional careers
Deep-TEMPEST: Using Deep Learning to Eavesdrop on HDMI from its Unintended Electromagnetic Emanations
Jul 12, 2024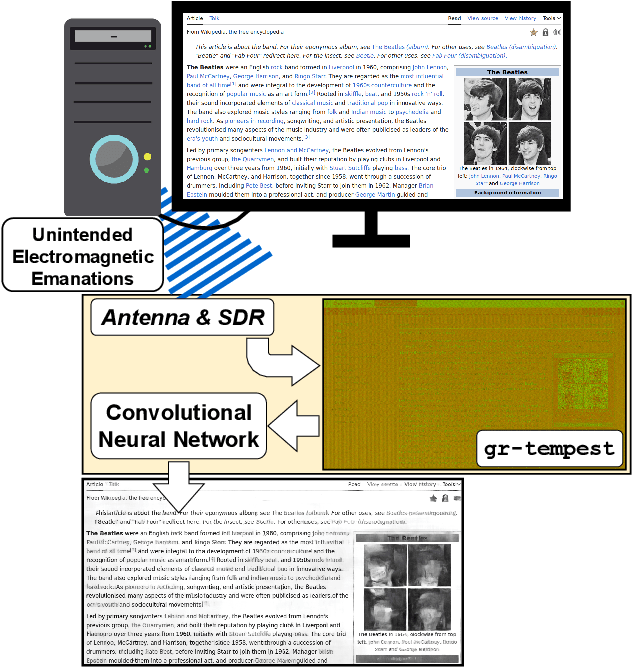
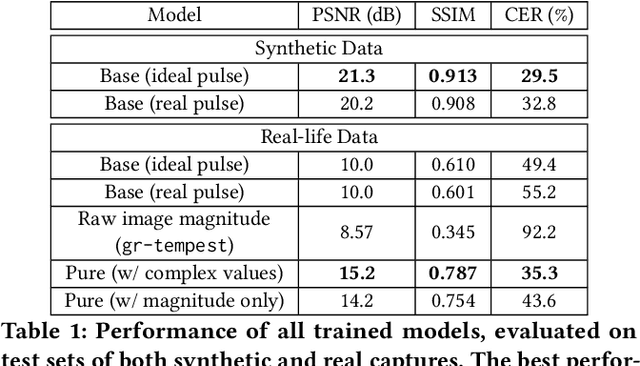
In this work, we address the problem of eavesdropping on digital video displays by analyzing the electromagnetic waves that unintentionally emanate from the cables and connectors, particularly HDMI. This problem is known as TEMPEST. Compared to the analog case (VGA), the digital case is harder due to a 10-bit encoding that results in a much larger bandwidth and non-linear mapping between the observed signal and the pixel's intensity. As a result, eavesdropping systems designed for the analog case obtain unclear and difficult-to-read images when applied to digital video. The proposed solution is to recast the problem as an inverse problem and train a deep learning module to map the observed electromagnetic signal back to the displayed image. However, this approach still requires a detailed mathematical analysis of the signal, firstly to determine the frequency at which to tune but also to produce training samples without actually needing a real TEMPEST setup. This saves time and avoids the need to obtain these samples, especially if several configurations are being considered. Our focus is on improving the average Character Error Rate in text, and our system improves this rate by over 60 percentage points compared to previous available implementations. The proposed system is based on widely available Software Defined Radio and is fully open-source, seamlessly integrated into the popular GNU Radio framework. We also share the dataset we generated for training, which comprises both simulated and over 1000 real captures. Finally, we discuss some countermeasures to minimize the potential risk of being eavesdropped by systems designed based on similar principles.
Analytical Characterization of the Operational Diversity Order in Fading Channels
May 15, 2024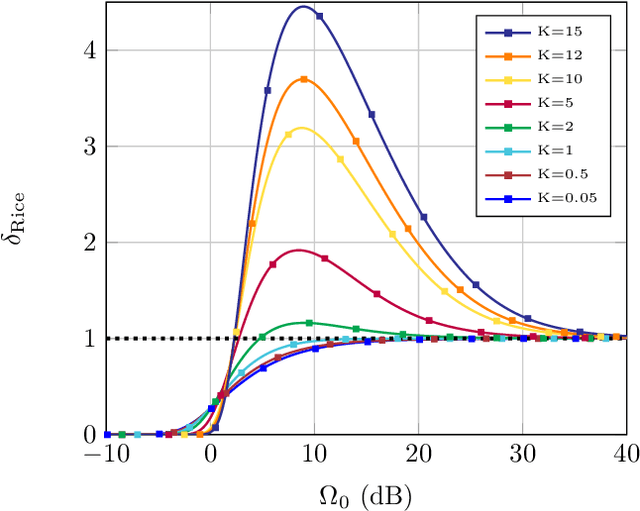
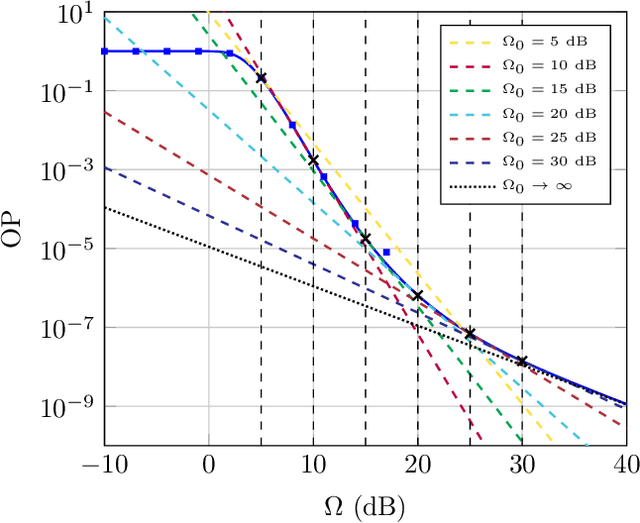
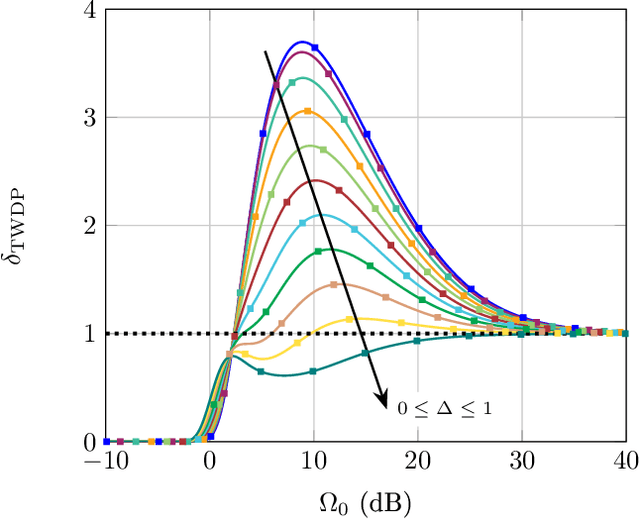
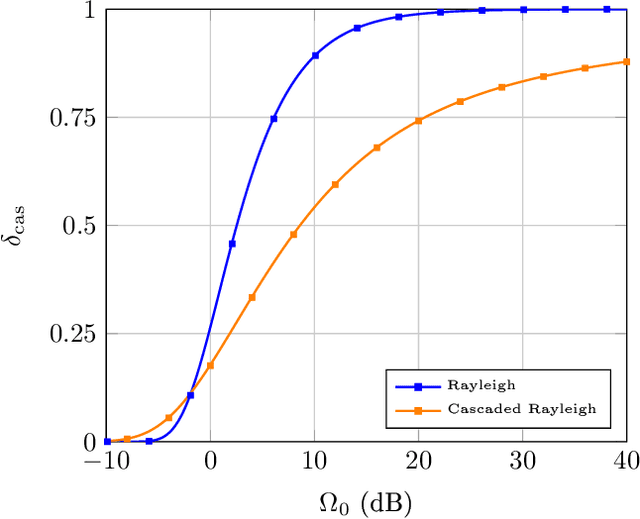
We introduce and characterize the operational diversity order (ODO) in fading channels, as a proxy to the classical notion of diversity order at any arbitrary operational signal-to-noise ratio (SNR). Thanks to this definition, relevant insights are brought up in a number of cases: (i) We quantify that in line-of-sight scenarios an increased diversity order is attainable compared to that achieved asymptotically; (ii) this effect is attenuated, but still visible, in the presence of an additional dominant specular component; (iii) we confirm that the decay slope in Rayleigh product channels increases very slowly and never fully achieves unitary slope for finite values of SNR.
Phoneme recognition in TIMIT with BLSTM-CTC
Apr 21, 2008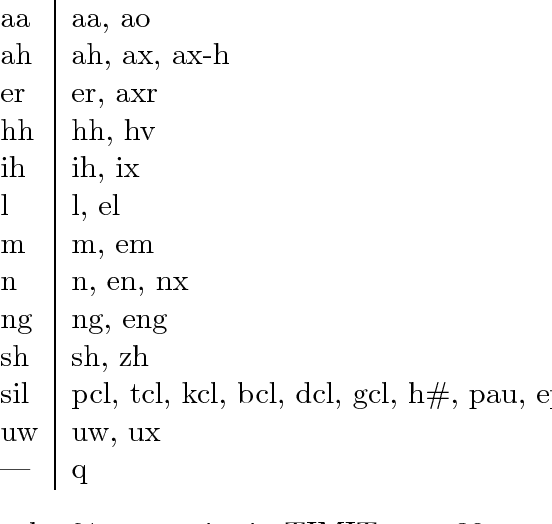
We compare the performance of a recurrent neural network with the best results published so far on phoneme recognition in the TIMIT database. These published results have been obtained with a combination of classifiers. However, in this paper we apply a single recurrent neural network to the same task. Our recurrent neural network attains an error rate of 24.6%. This result is not significantly different from that obtained by the other best methods, but they rely on a combination of classifiers for achieving comparable performance.