 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDIGIMON: Diagnosis and Mitigation of Sampling Skew for Reinforcement Learning based Meta-Planner in Robot Navigation
Sep 17, 2024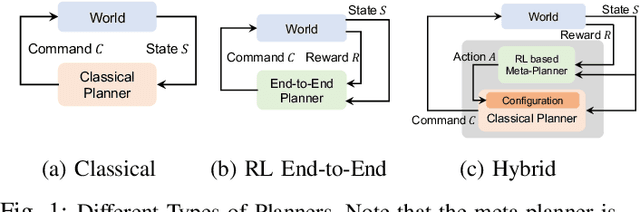



Robot navigation is increasingly crucial across applications like delivery services and warehouse management. The integration of Reinforcement Learning (RL) with classical planning has given rise to meta-planners that combine the adaptability of RL with the explainable decision-making of classical planners. However, the exploration capabilities of RL-based meta-planners during training are often constrained by the capabilities of the underlying classical planners. This constraint can result in limited exploration, thereby leading to sampling skew issues. To address these issues, our paper introduces a novel framework, DIGIMON, which begins with behavior-guided diagnosis for exploration bottlenecks within the meta-planner and follows up with a mitigation strategy that conducts up-sampling from diagnosed bottleneck data. Our evaluation shows 13.5%+ improvement in navigation performance, greater robustness in out-of-distribution environments, and a 4x boost in training efficiency. DIGIMON is designed as a versatile, plug-and-play solution, allowing seamless integration into various RL-based meta-planners.
PHYSFRAME: Type Checking Physical Frames of Reference for Robotic Systems
Jun 21, 2021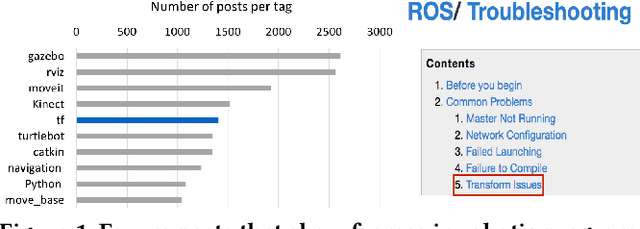
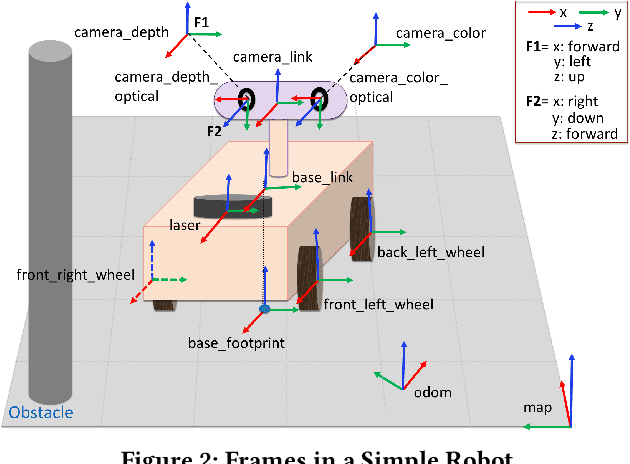
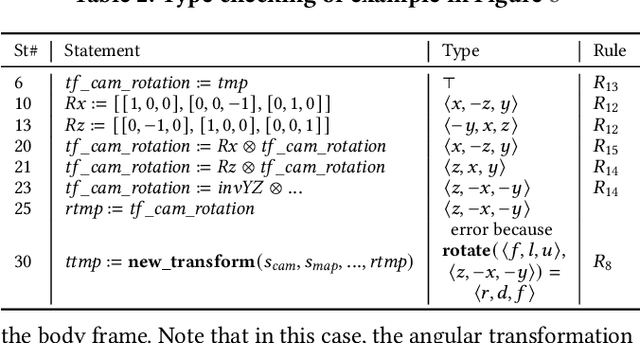
A robotic system continuously measures its own motions and the external world during operation. Such measurements are with respect to some frame of reference, i.e., a coordinate system. A nontrivial robotic system has a large number of different frames and data have to be translated back-and-forth from a frame to another. The onus is on the developers to get such translation right. However, this is very challenging and error-prone, evidenced by the large number of questions and issues related to frame uses on developers' forum. Since any state variable can be associated with some frame, reference frames can be naturally modeled as variable types. We hence develop a novel type system that can automatically infer variables' frame types and in turn detect any type inconsistencies and violations of frame conventions. The evaluation on a set of 180 publicly available ROS projects shows that our system can detect 190 inconsistencies with 154 true positives. We reported 52 to developers and received 18 responses so far, with 15 fixed/acknowledged. Our technique also finds 45 violations of common practices.