 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDIGIMON: Diagnosis and Mitigation of Sampling Skew for Reinforcement Learning based Meta-Planner in Robot Navigation
Paper and Code
Sep 17, 2024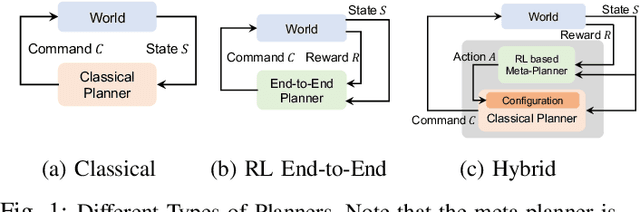



Robot navigation is increasingly crucial across applications like delivery services and warehouse management. The integration of Reinforcement Learning (RL) with classical planning has given rise to meta-planners that combine the adaptability of RL with the explainable decision-making of classical planners. However, the exploration capabilities of RL-based meta-planners during training are often constrained by the capabilities of the underlying classical planners. This constraint can result in limited exploration, thereby leading to sampling skew issues. To address these issues, our paper introduces a novel framework, DIGIMON, which begins with behavior-guided diagnosis for exploration bottlenecks within the meta-planner and follows up with a mitigation strategy that conducts up-sampling from diagnosed bottleneck data. Our evaluation shows 13.5%+ improvement in navigation performance, greater robustness in out-of-distribution environments, and a 4x boost in training efficiency. DIGIMON is designed as a versatile, plug-and-play solution, allowing seamless integration into various RL-based meta-planners.