 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal-PIK: Causality-based Physical Reasoning with a Physics-Informed Kernel
May 28, 2025



Tasks that involve complex interactions between objects with unknown dynamics make planning before execution difficult. These tasks require agents to iteratively improve their actions after actively exploring causes and effects in the environment. For these type of tasks, we propose Causal-PIK, a method that leverages Bayesian optimization to reason about causal interactions via a Physics-Informed Kernel to help guide efficient search for the best next action. Experimental results on Virtual Tools and PHYRE physical reasoning benchmarks show that Causal-PIK outperforms state-of-the-art results, requiring fewer actions to reach the goal. We also compare Causal-PIK to human studies, including results from a new user study we conducted on the PHYRE benchmark. We find that Causal-PIK remains competitive on tasks that are very challenging, even for human problem-solvers.
Too many cooks: Coordinating multi-agent collaboration through inverse planning
Mar 26, 2020

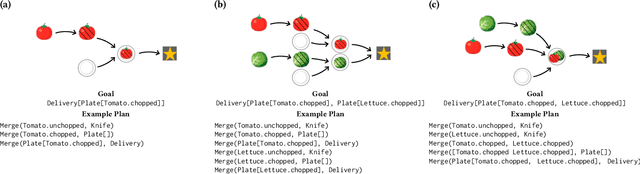
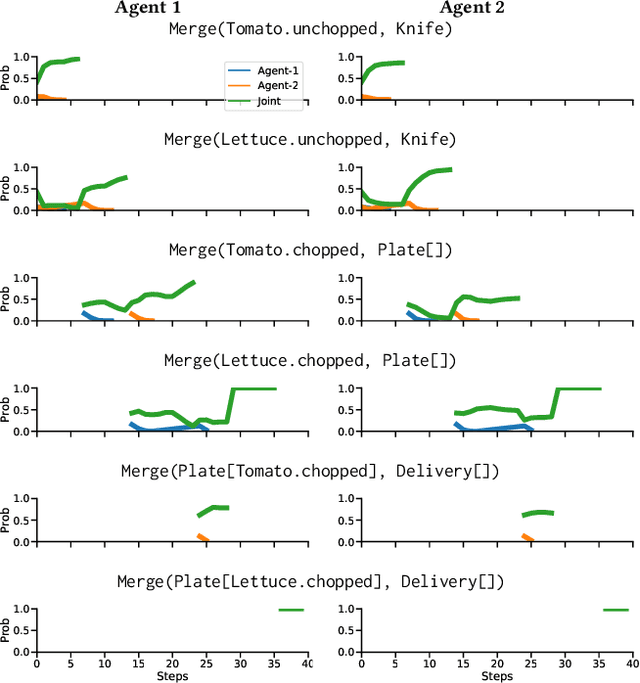
Collaboration requires agents to coordinate their behavior on the fly, sometimes cooperating to solve a single task together and other times dividing it up into sub-tasks to work on in parallel. Underlying the human ability to collaborate is theory-of-mind, the ability to infer the hidden mental states that drive others to act. Here, we develop Bayesian Delegation, a decentralized multi-agent learning mechanism with these abilities. Bayesian Delegation enables agents to rapidly infer the hidden intentions of others by inverse planning. These inferences enable agents to flexibly decide in the absence of communication when to cooperate on the same sub-task and when to work on different sub-tasks in parallel. We test this model in a suite of multi-agent Markov decision processes inspired by cooking problems. To succeed, agents must coordinate both their high-level plans (e.g., what sub-task they should work on) and their low-level actions (e.g., avoiding collisions). Bayesian Delegation bridges these two levels and rapidly aligns agents' beliefs about who should work on what without any communication. When agents cooperate on the same sub-task, coordinated plans emerge that enable the group of agents to achieve tasks no agent can complete on their own. Our model outperforms lesioned agents without Bayesian Delegation or without the ability to cooperate on the same sub-task.