 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrespondence-Free SE(3) Point Cloud Registration in RKHS via Unsupervised Equivariant Learning
Jul 29, 2024This paper introduces a robust unsupervised SE(3) point cloud registration method that operates without requiring point correspondences. The method frames point clouds as functions in a reproducing kernel Hilbert space (RKHS), leveraging SE(3)-equivariant features for direct feature space registration. A novel RKHS distance metric is proposed, offering reliable performance amidst noise, outliers, and asymmetrical data. An unsupervised training approach is introduced to effectively handle limited ground truth data, facilitating adaptation to real datasets. The proposed method outperforms classical and supervised methods in terms of registration accuracy on both synthetic (ModelNet40) and real-world (ETH3D) noisy, outlier-rich datasets. To our best knowledge, this marks the first instance of successful real RGB-D odometry data registration using an equivariant method. The code is available at {https://sites.google.com/view/eccv24-equivalign}
RKHS-BA: A Semantic Correspondence-Free Multi-View Registration Framework with Global Tracking
Mar 02, 2024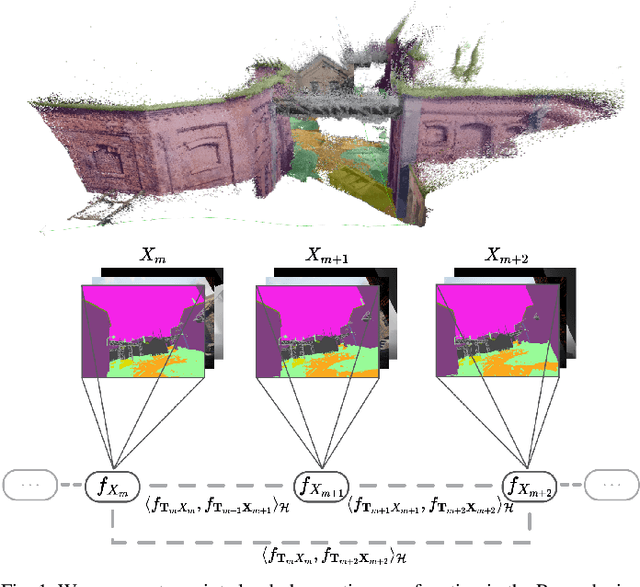
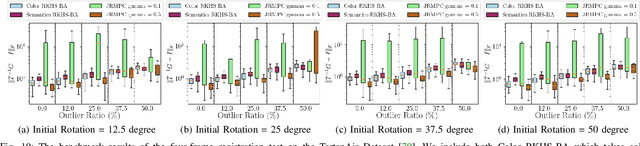
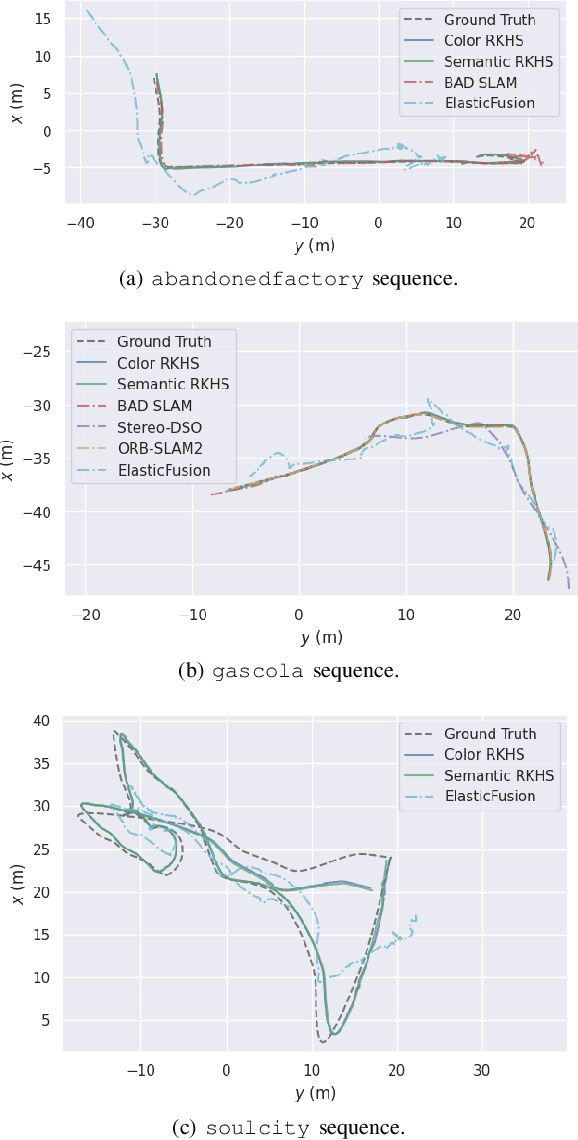
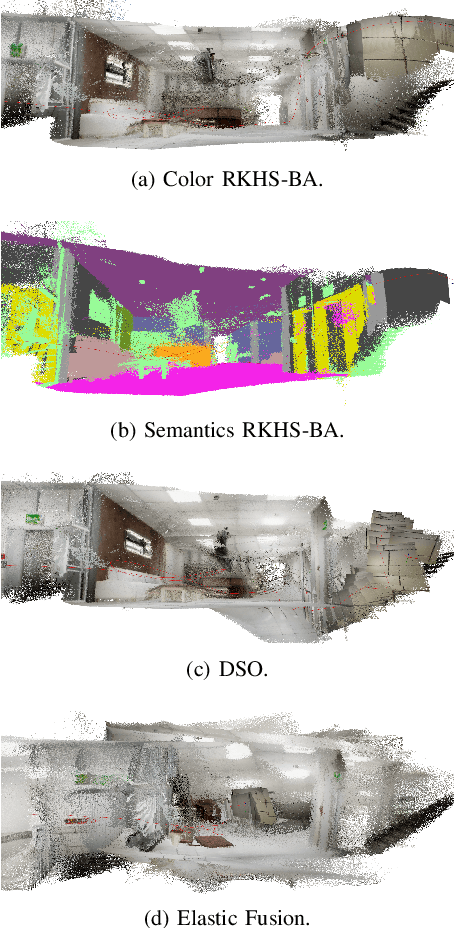
This work reports a novel Bundle Adjustment (BA) formulation using a Reproducing Kernel Hilbert Space (RKHS) representation called RKHS-BA. The proposed formulation is correspondence-free, enables the BA to use RGB-D/LiDAR and semantic labels in the optimization directly, and provides a generalization for the photometric loss function commonly used in direct methods. RKHS-BA can incorporate appearance and semantic labels within a continuous spatial-semantic functional representation that does not require optimization via image pyramids. We demonstrate its applications in sliding-window odometry and global LiDAR mapping, which show highly robust performance in extremely challenging scenes and the best trade-off of generalization and accuracy.