 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Closed-loop Training for Autonomous Driving
Jun 27, 2023Recent advances in high-fidelity simulators have enabled closed-loop training of autonomous driving agents, potentially solving the distribution shift in training v.s. deployment and allowing training to be scaled both safely and cheaply. However, there is a lack of understanding of how to build effective training benchmarks for closed-loop training. In this work, we present the first empirical study which analyzes the effects of different training benchmark designs on the success of learning agents, such as how to design traffic scenarios and scale training environments. Furthermore, we show that many popular RL algorithms cannot achieve satisfactory performance in the context of autonomous driving, as they lack long-term planning and take an extremely long time to train. To address these issues, we propose trajectory value learning (TRAVL), an RL-based driving agent that performs planning with multistep look-ahead and exploits cheaply generated imagined data for efficient learning. Our experiments show that TRAVL can learn much faster and produce safer maneuvers compared to all the baselines. For more information, visit the project website: https://waabi.ai/research/travl
RadarNet: Exploiting Radar for Robust Perception of Dynamic Objects
Jul 28, 2020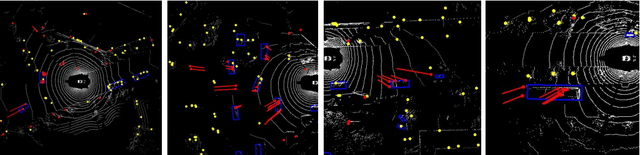


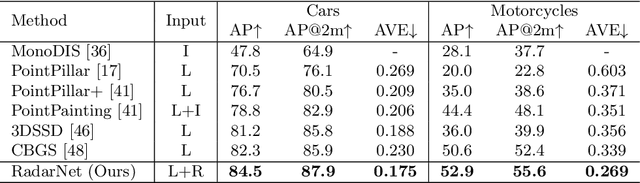
We tackle the problem of exploiting Radar for perception in the context of self-driving as Radar provides complementary information to other sensors such as LiDAR or cameras in the form of Doppler velocity. The main challenges of using Radar are the noise and measurement ambiguities which have been a struggle for existing simple input or output fusion methods. To better address this, we propose a new solution that exploits both LiDAR and Radar sensors for perception. Our approach, dubbed RadarNet, features a voxel-based early fusion and an attention-based late fusion, which learn from data to exploit both geometric and dynamic information of Radar data. RadarNet achieves state-of-the-art results on two large-scale real-world datasets in the tasks of object detection and velocity estimation. We further show that exploiting Radar improves the perception capabilities of detecting faraway objects and understanding the motion of dynamic objects.