 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedFG: Privacy-Preserving and Robust Federated Learning via Flow-Matching Generation
Mar 30, 2026Federated learning (FL) enables distributed clients to collaboratively train a global model using local private data. Nevertheless, recent studies show that conventional FL algorithms still exhibit deficiencies in privacy protection, and the server lacks a reliable and stable aggregation rule for updating the global model. This situation creates opportunities for adversaries: on the one hand, they may eavesdrop on uploaded gradients or model parameters, potentially leaking benign clients' private data; on the other hand, they may compromise clients to launch poisoning attacks that corrupt the global model. To balance accuracy and security, we propose FedFG, a robust FL framework based on flow-matching generation that simultaneously preserves client privacy and resists sophisticated poisoning attacks. On the client side, each local network is decoupled into a private feature extractor and a public classifier. Each client is further equipped with a flow-matching generator that replaces the extractor when interacting with the server, thereby protecting private features while learning an approximation of the underlying data distribution. Complementing the client-side design, the server employs a client-update verification scheme and a novel robust aggregation mechanism driven by synthetic samples produced by the flow-matching generator. Experiments on MNIST, FMNIST, and CIFAR-10 demonstrate that, compared with prior work, our approach adapts to multiple attack strategies and achieves higher accuracy while maintaining strong privacy protection.
Adaptive Path-Planning for Autonomous Robots: A UCH-Enhanced Q-Learning Approach
Jan 09, 2025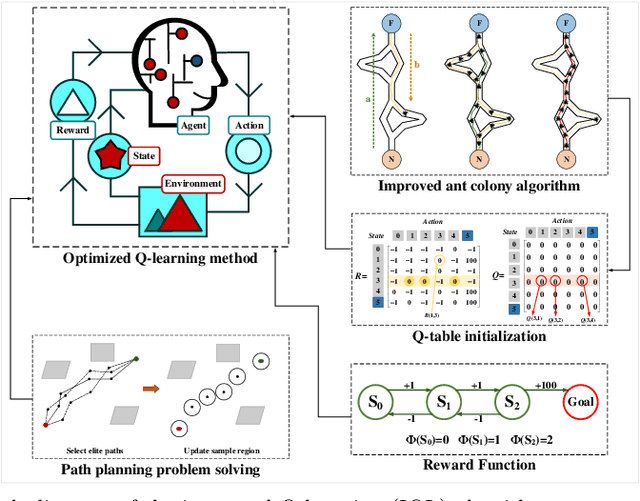
Q-learning methods are widely used in robot path planning but often face challenges of inefficient search and slow convergence. We propose an Improved Q-learning (IQL) framework that enhances standard Q-learning in two significant ways. First, we introduce the Path Adaptive Collaborative Optimization (PACO) algorithm to optimize Q-table initialization, providing better initial estimates and accelerating learning. Second, we incorporate a Utility-Controlled Heuristic (UCH) mechanism with dynamically tuned parameters to optimize the reward function, enhancing the algorithm's accuracy and effectiveness in path-planning tasks. Extensive experiments in three different raster grid environments validate the superior performance of our IQL framework. The results demonstrate that our IQL algorithm outperforms existing methods, including FIQL, PP-QL-based CPP, DFQL, and QMABC algorithms, in terms of path-planning capabilities.
* 25 pages, 20 figures
Research on geometric figure classification algorithm based on Deep Learning
Apr 25, 2024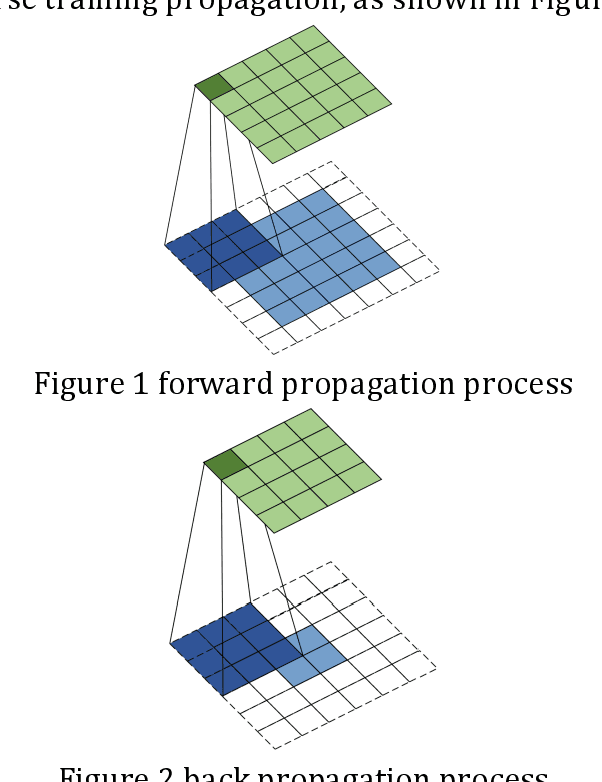
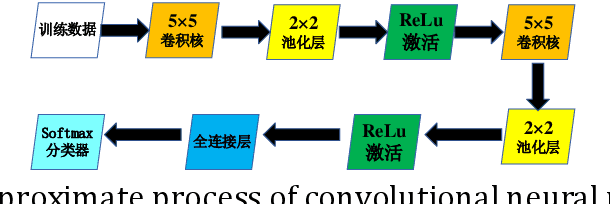
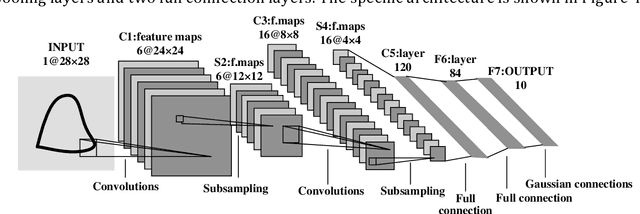
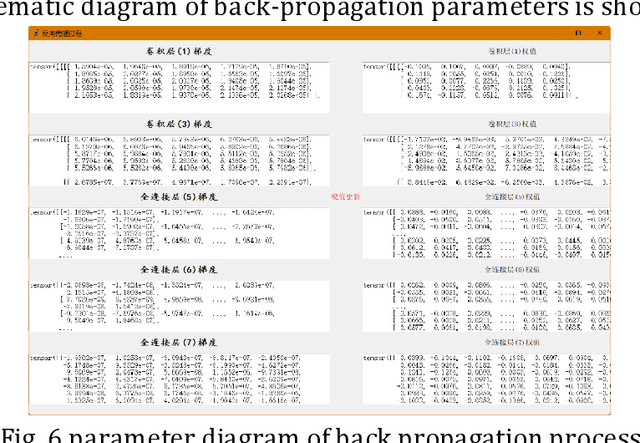
In recent years, with the rapid development of computer information technology, the development of artificial intelligence has been accelerating. The traditional geometry recognition technology is relatively backward and the recognition rate is low. In the face of massive information database, the traditional algorithm model inevitably has the problems of low recognition accuracy and poor performance. Deep learning theory has gradually become a very important part of machine learning. The implementation of convolutional neural network (CNN) reduces the difficulty of graphics generation algorithm. In this paper, using the advantages of lenet-5 architecture sharing weights and feature extraction and classification, the proposed geometric pattern recognition algorithm model is faster in the training data set. By constructing the shared feature parameters of the algorithm model, the cross-entropy loss function is used in the recognition process to improve the generalization of the model and improve the average recognition accuracy of the test data set.
* 6 pages,9 figures
The Dilemma of Choice: Addressing Constraint Selection for Autonomous Robotic Agents
May 18, 2023The tasks that an autonomous agent is expected to perform are often optional or are incompatible with each other owing to the agent's limited actuation capabilities, specifically the dynamics and control input bounds. We encode tasks as time-dependent state constraints and leverage the advances in multi-objective optimization to formulate the problem of choosing tasks as selection of a feasible subset of constraints that can be satisfied for all time and maximizes a performance metric. We show that this problem, although amenable to reachability or mixed integer model predictive control-based analysis in the offline phase, is NP-Hard in general and therefore requires heuristics to be solved efficiently. When incompatibility in constraints is observed under a given policy that imposes task constraints at each time step in an optimization problem, we assign a Lagrange score to each of these constraints based on the variation in the corresponding Lagrange multipliers over the compatible time horizon. These scores are then used to decide the order in which constraints are dropped in a greedy strategy. We further employ a genetic algorithm to improve upon the greedy strategy. We evaluate our method on a robot waypoint following task when the low-level controllers that impose state constraints are described by Control Barrier Function-based Quadratic Programs and provide a comparison with waypoint selection based on knowledge of backward reachable sets.
REFINE: Reachability-based Trajectory Design using Robust Feedback Linearization and Zonotopes
Nov 22, 2022Performing real-time receding horizon motion planning for autonomous vehicles while providing safety guarantees remains difficult. This is because existing methods to accurately predict ego vehicle behavior under a chosen controller use online numerical integration that requires a fine time discretization and thereby adversely affects real-time performance. To address this limitation, several recent papers have proposed to apply offline reachability analysis to conservatively predict the behavior of the ego vehicle. This reachable set can be constructed by utilizing a simplified model whose behavior is assumed a priori to conservatively bound the dynamics of a full-order model. However, guaranteeing that one satisfies this assumption is challenging. This paper proposes a framework named REFINE to overcome the limitations of these existing approaches. REFINE utilizes a parameterized robust controller that partially linearizes the vehicle dynamics even in the presence of modeling error. Zonotope-based reachability analysis is then performed on the closed-loop, full-order vehicle dynamics to compute the corresponding control-parameterized, over-approximate Forward Reachable Sets (FRS). Because reachability analysis is applied to the full-order model, the potential conservativeness introduced by using a simplified model is avoided. The pre-computed, control-parameterized FRS is then used online in an optimization framework to ensure safety. The proposed method is compared to several state of the art methods during a simulation-based evaluation on a full-size vehicle model and is evaluated on a 1/10th race car robot in real hardware testing. In contrast to existing methods, REFINE is shown to enable the vehicle to safely navigate itself through complex environments.