 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Path-Planning for Autonomous Robots: A UCH-Enhanced Q-Learning Approach
Jan 09, 2025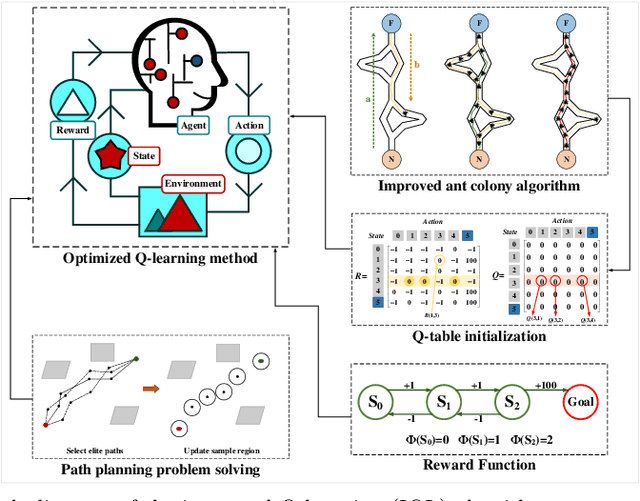
Q-learning methods are widely used in robot path planning but often face challenges of inefficient search and slow convergence. We propose an Improved Q-learning (IQL) framework that enhances standard Q-learning in two significant ways. First, we introduce the Path Adaptive Collaborative Optimization (PACO) algorithm to optimize Q-table initialization, providing better initial estimates and accelerating learning. Second, we incorporate a Utility-Controlled Heuristic (UCH) mechanism with dynamically tuned parameters to optimize the reward function, enhancing the algorithm's accuracy and effectiveness in path-planning tasks. Extensive experiments in three different raster grid environments validate the superior performance of our IQL framework. The results demonstrate that our IQL algorithm outperforms existing methods, including FIQL, PP-QL-based CPP, DFQL, and QMABC algorithms, in terms of path-planning capabilities.
* 25 pages, 20 figures
Enhancing Vectorized Map Perception with Historical Rasterized Maps
Sep 01, 2024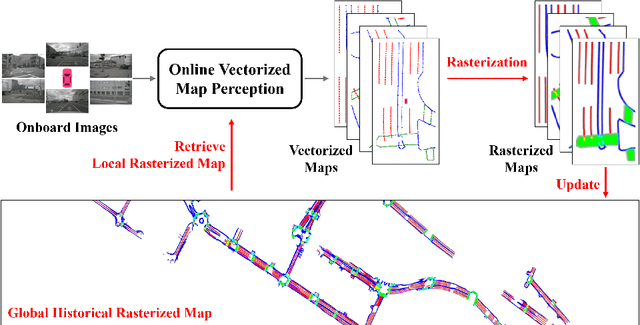
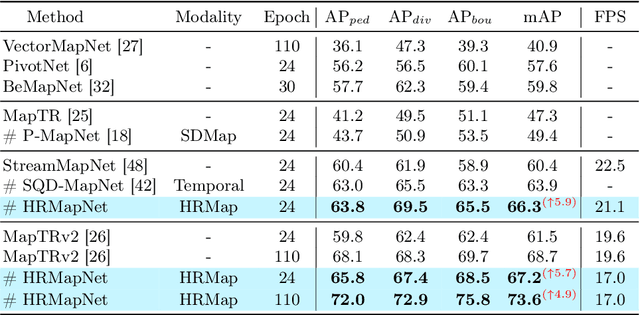
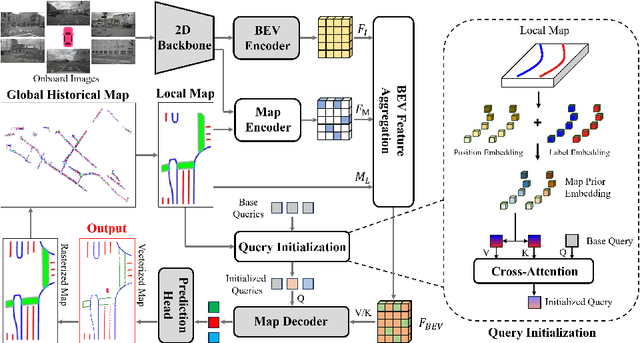
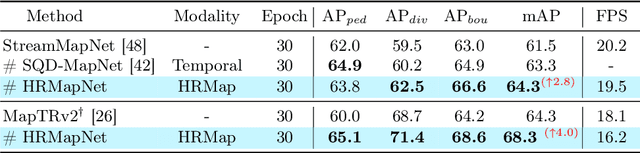
In autonomous driving, there is growing interest in end-to-end online vectorized map perception in bird's-eye-view (BEV) space, with an expectation that it could replace traditional high-cost offline high-definition (HD) maps. However, the accuracy and robustness of these methods can be easily compromised in challenging conditions, such as occlusion or adverse weather, when relying only on onboard sensors. In this paper, we propose HRMapNet, leveraging a low-cost Historical Rasterized Map to enhance online vectorized map perception. The historical rasterized map can be easily constructed from past predicted vectorized results and provides valuable complementary information. To fully exploit a historical map, we propose two novel modules to enhance BEV features and map element queries. For BEV features, we employ a feature aggregation module to encode features from both onboard images and the historical map. For map element queries, we design a query initialization module to endow queries with priors from the historical map. The two modules contribute to leveraging map information in online perception. Our HRMapNet can be integrated with most online vectorized map perception methods. We integrate it in two state-of-the-art methods, significantly improving their performance on both the nuScenes and Argoverse 2 datasets. The source code is released at https://github.com/HXMap/HRMapNet.
Leveraging Enhanced Queries of Point Sets for Vectorized Map Construction
Feb 27, 2024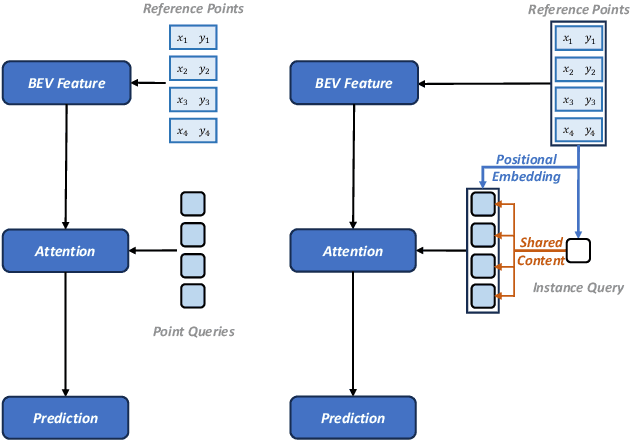
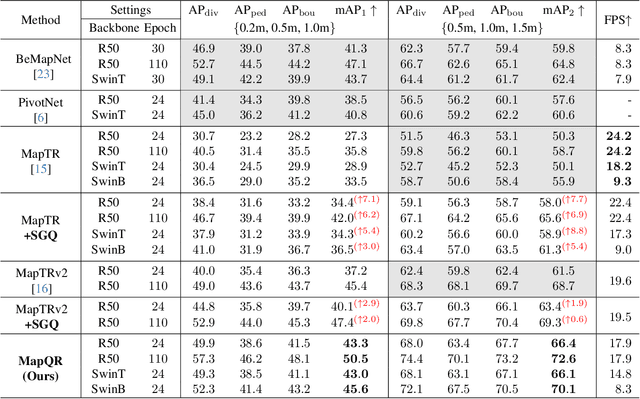

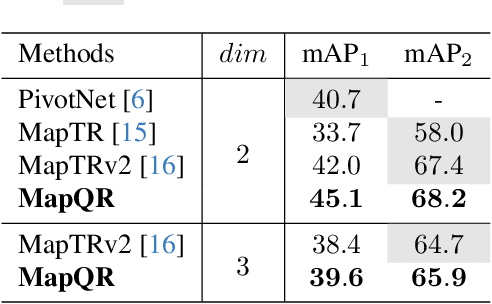
In autonomous driving, the high-definition (HD) map plays a crucial role in localization and planning. Recently, several methods have facilitated end-to-end online map construction in DETR-like frameworks. However, little attention has been paid to the potential capabilities of exploring the query mechanism. This paper introduces MapQR, an end-to-end method with an emphasis on enhancing query capabilities for constructing online vectorized maps. Although the map construction is essentially a point set prediction task, MapQR utilizes instance queries rather than point queries. These instance queries are scattered for the prediction of point sets and subsequently gathered for the final matching. This query design, called the scatter-and-gather query, shares content information in the same map element and avoids possible inconsistency of content information in point queries. We further exploit prior information to enhance an instance query by adding positional information embedded from their reference points. Together with a simple and effective improvement of a BEV encoder, the proposed MapQR achieves the best mean average precision (mAP) and maintains good efficiency on both nuScenes and Argoverse 2. In addition, integrating our query design into other models can boost their performance significantly. The code will be available at https://github.com/HXMap/MapQR.