 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArterialNet: Reconstructing Arterial Blood Pressure Waveform with Wearable Pulsatile Signals, a Cohort-Aware Approach
Oct 24, 2024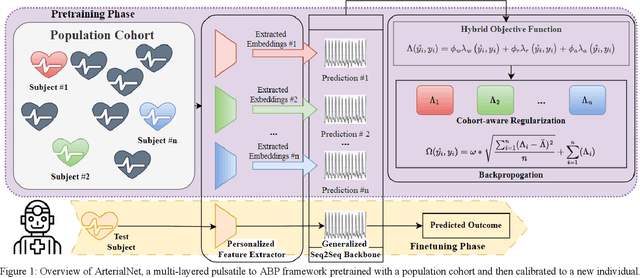


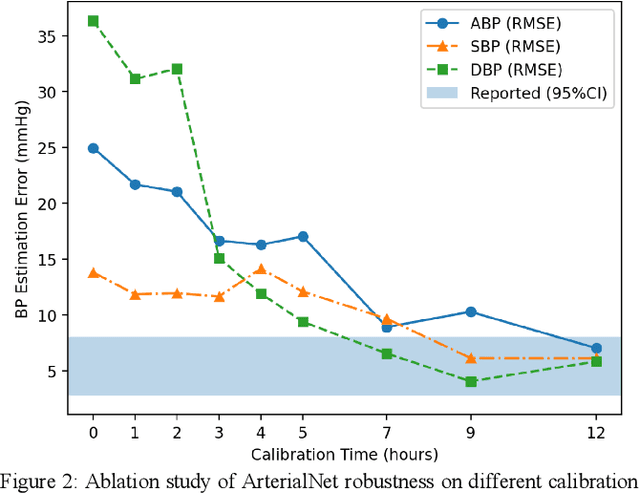
Continuous arterial blood pressure (ABP) monitoring is invasive but essential for hemodynamic monitoring. Recent techniques have reconstructed ABP non-invasively using pulsatile signals but produced inaccurate systolic and diastolic blood pressure (SBP and DBP) values and were sensitive to individual variability. ArterialNet integrates generalized pulsatile-to-ABP signal translation and personalized feature extraction using hybrid loss functions and regularization. We validated ArterialNet using the MIMIC-III dataset and achieved a root mean square error (RMSE) of 5.41 mmHg, with at least a 58% lower standard deviation. ArterialNet reconstructed ABP with an RMSE of 7.99 mmHg in remote health scenarios. ArterialNet achieved superior performance in ABP reconstruction and SBP and DBP estimations, with significantly reduced subject variance, demonstrating its potential in remote health settings. We also ablated ArterialNet architecture to investigate the contributions of each component and evaluated its translational impact and robustness by conducting a series of ablations on data quality and availability.
Boosted-SpringDTW for Comprehensive Feature Extraction of Physiological Signals
Jan 11, 2022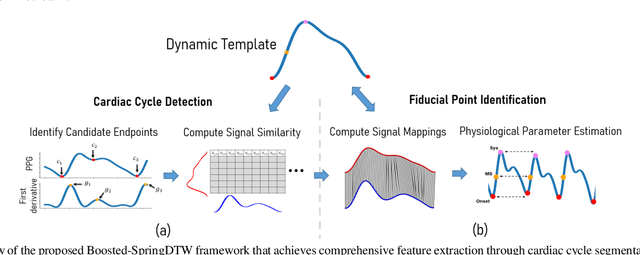
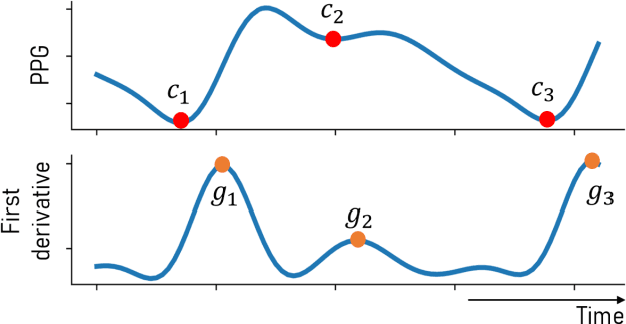
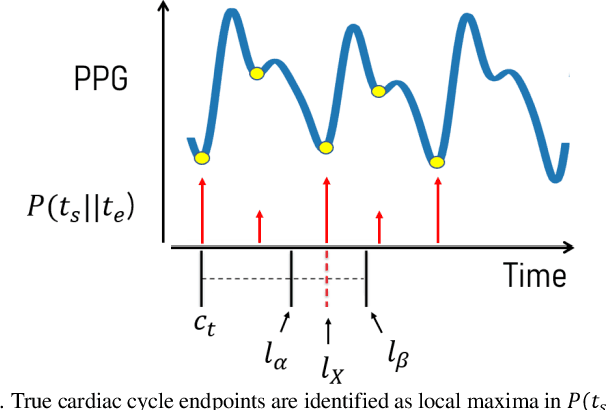
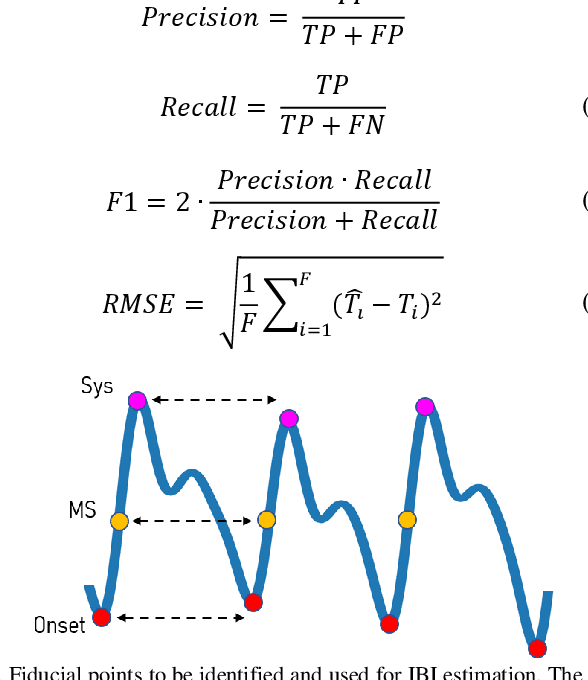
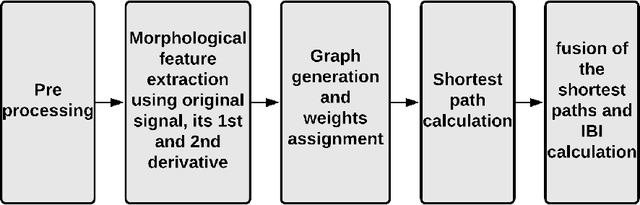
Goal: To achieve-high quality comprehensive feature extraction from physiological signals that enables precise physiological parameter estimation despite evolving waveform morphologies. Methods: We propose Boosted-SpringDTW, a probabilistic framework that leverages dynamic time warping (DTW) and minimal domain-specific heuristics to simultaneously segment physiological signals and identify fiducial points that represent cardiac events. An automated dynamic template adapts to evolving waveform morphologies. We validate Boosted-SpringDTW performance with a benchmark PPG dataset whose morphologies include subject- and respiratory-induced variation. Results: Boosted-SpringDTW achieves precision, recall, and F1-scores over 0.96 for identifying fiducial points and mean absolute error values less than 11.41 milliseconds when estimating IBI. Conclusion: Boosted-SpringDTW improves F1-Scores compared to two baseline feature extraction algorithms by 35 percent on average for fiducial point identification and mean percent difference by 16 percent on average for IBI estimation. Significance: Precise hemodynamic parameter estimation with wearable devices enables continuous health monitoring throughout a patients' daily life.
Inter-Beat Interval Estimation with Tiramisu Model: A Novel Approach with Reduced Error
Jul 01, 2021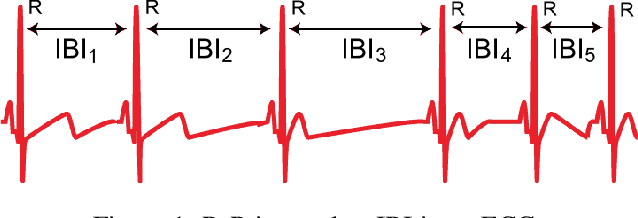
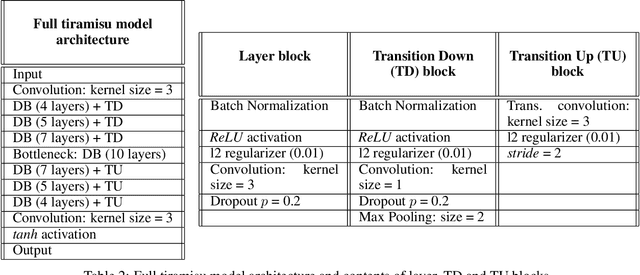
Inter-beat interval (IBI) measurement enables estimation of heart-rate variability (HRV) which, in turns, can provide early indication of potential cardiovascular diseases. However, extracting IBIs from noisy signals is challenging since the morphology of the signal is distorted in the presence of the noise. Electrocardiogram (ECG) of a person in heavy motion is highly corrupted with noise, known as motion-artifact, and IBI extracted from it is inaccurate. As a part of remote health monitoring and wearable system development, denoising ECG signals and estimating IBIs correctly from them have become an emerging topic among signal-processing researchers. Apart from conventional methods, deep-learning techniques have been successfully used in signal denoising recently, and diagnosis process has become easier, leading to accuracy levels that were previously unachievable. We propose a deep-learning approach leveraging tiramisu autoencoder model to suppress motion-artifact noise and make the R-peaks of the ECG signal prominent even in the presence of high-intensity motion. After denoising, IBIs are estimated more accurately expediting diagnosis tasks. Results illustrate that our method enables IBI estimation from noisy ECG signals with SNR up to -30dB with average root mean square error (RMSE) of 13 milliseconds for estimated IBIs. At this noise level, our error percentage remains below 8% and outperforms other state of the art techniques.
SmartCrawler: An In-pipe Robotic System with Wireless Communication in Water Distribution Systems
May 18, 2021
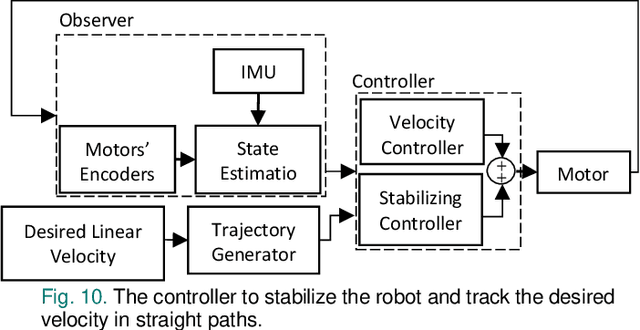

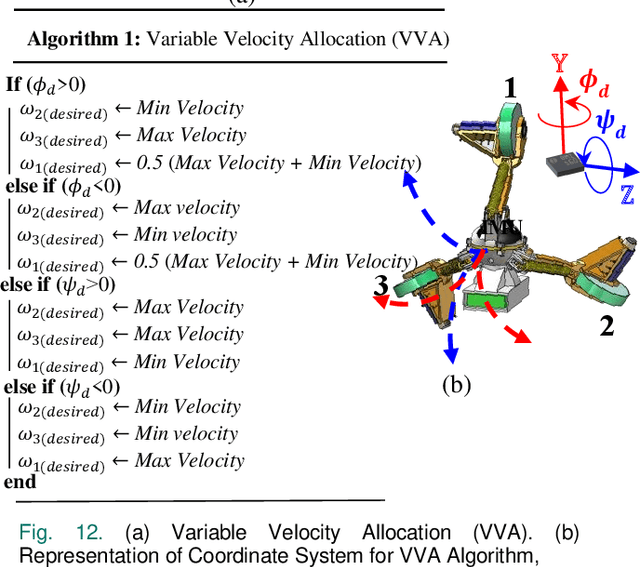
Water Distribution Systems(WDS) are critical infrastructures that deliver potable water to residential areas. Incidents to pipelines cause water loss and contamination in pipelines. Hence, water quality monitoring is one of the requirements for utility managers to ensure the health of water. However, it is challenging to access all parts of the WDS since they are long and comprise pipes with different configurations and sizes. In this paper, we propose a size-adaptable and modular in-pipe robot so-called SmartCrawler that works based on wheel wall press mechanism. We develop a two-phase motion control algorithm that enables reliable motion in straight and non-straight configurations of in-service pipelines. The controller in phase 1 stabilizes the robot in the straight paths and tracks the desired velocity with high-level linear quadratic regulator (LQR) and low-level proportional-integral-derivative (PID) based controllers. The controller in phase 2 with a designed error-check submodule and velocity controller, enables the robot to steer to the desired directions at non-straight configurations. The performance of the two-phase controller is evaluated with experimental and simulation results. Wireless underground communication is a challenging task for underground applications. We propose a bi-directional wireless sensor module based on active radio frequency identification (RFID) that works in 434MHz carrier frequency and evaluate its performance with experimental results. At the end of this work, we design the printed circuit board (PCB) for the SmartCrawler that embeds the electronic components in a confined and sealed environment. The simulation and the experimental results prove the proposed robotic system can be used for in pipe missions where wireless communication is needed to communicate with the robot during operation.
Design, Characterization, and Control of a Size Adaptable In-pipe Robot for Water Distribution Systems
Jan 17, 2021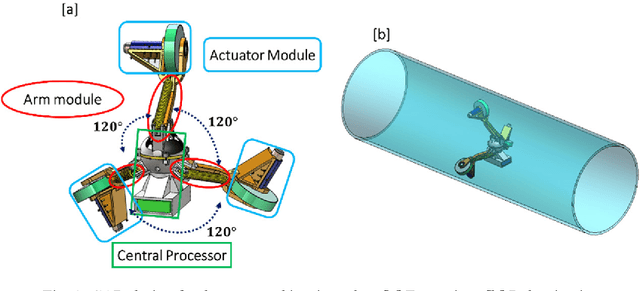
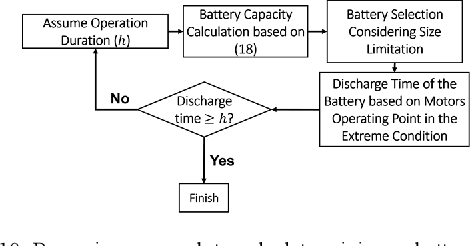
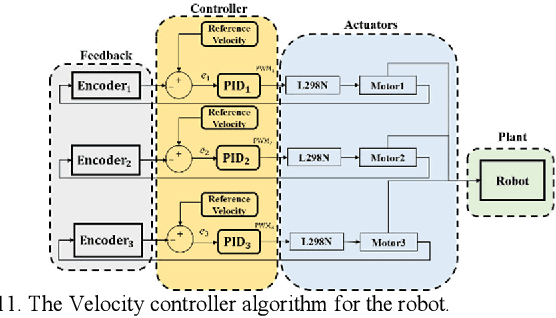
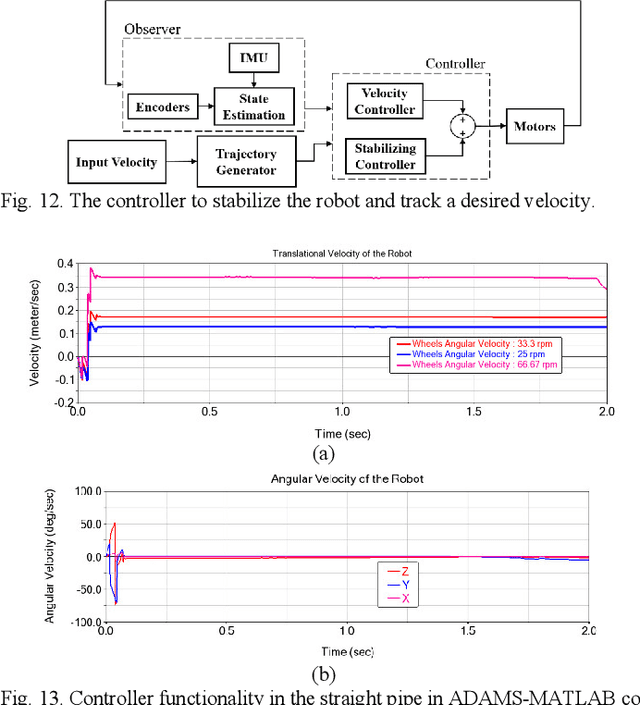
Leak detection and water quality monitoring are requirements and challenging tasks in Water Distribution Systems (WDS). In-line robots are designed for this aim. In our previous work, we designed an in-pipe robot [1]. In this research, we present the design of the central processor, characterize and control the robot based on the condition of operation in a highly pressurized environment of pipelines with the presence of high-speed flow. To this aim, an extreme operation condition is simulated with computational fluid dynamics (CFD) and the spring mechanism is characterized to ensure sufficient stabilizing force during operation based on the extreme operating condition. Also, an end-to-end method is suggested for power considerations for our robot that calculates minimum battery capacity and operation duration in the extreme operating condition. Finally, we design a novel LQR-PID based controller based on the system auxiliary matrices that retain the robot stability inside the pipeline against disturbances and uncertainties during operation. The ADAMS-MATLAB co-simulation of the robot-controller shows the rotational velocity with -4 degree/sec and +3 degree/sec margin around x, y, and z axes while the system tracks different desired velocities in pipelines (i.e. 0.12m/s, 0.17m/s, and 0.35m/s). Also, experimental results for four iterations in a 14-inch diameter PVC pipe show that the controller brings initial values of stabilizing states to zero and oscillate around it with a margin of 2 degrees and the system tracks desired velocities of 0.1m/s, 0.2m/s, 0.3m/s, and 0.35m/s in which makes the robot dexterous in uncertain and highly disturbed the environment of pipelines during operation.
An LQR-assisted Control Algorithm for an Under-actuated In-pipe Robot in Water Distribution Systems
Dec 29, 2020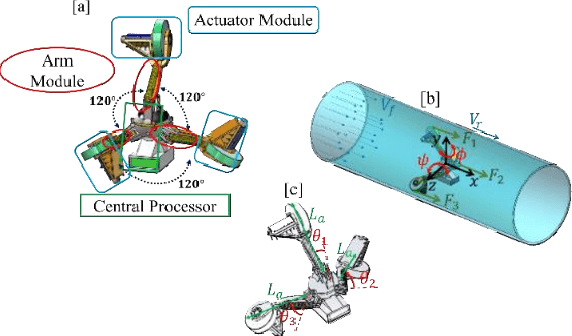
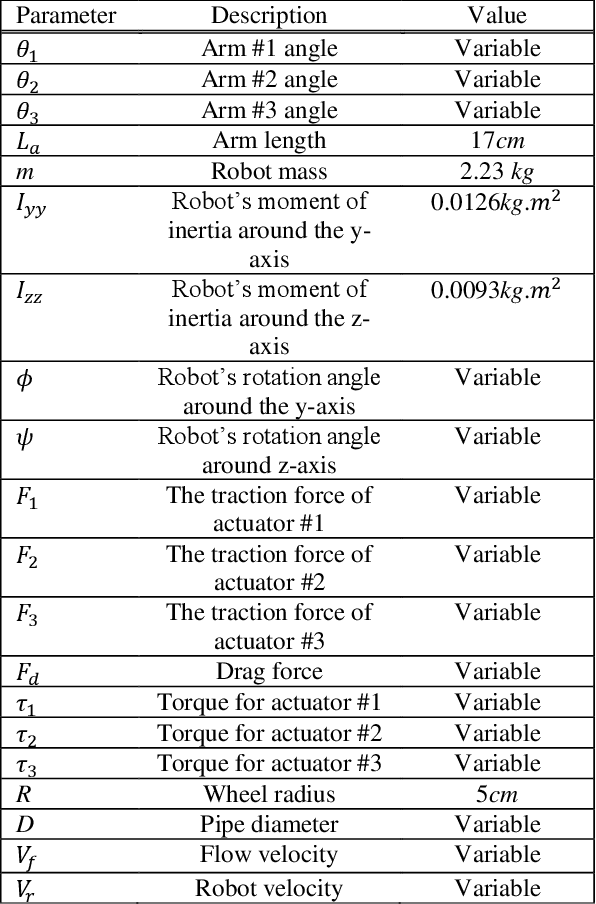
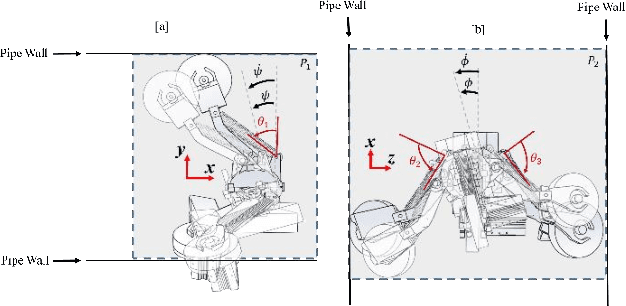
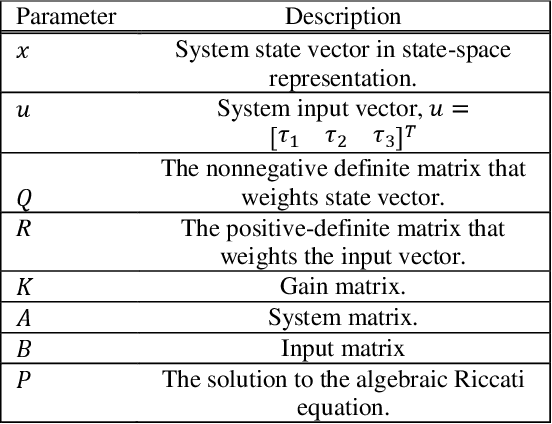
To address the operational challenges of in-pipe robots in large pipes of water distribution systems (WDS), in this research, a control algorithm is proposed for our previously designed robot [4]. Our size adaptable robot has an under-actuated modular design that can be used for both leak detection and quality monitoring. First, nonlinear dynamical governing equations of the robot are derived with the definition of two perpendicular planes, and two sets of states are defined for the robot for stabilization and mobilization. For stabilization, we calculated the auxiliary system matrices and designed a stabilizer controller based on the linear quadratic regulator (LQR) controller, and combined it with a proportional-integral-derivative (PID) based controller for mobilization. The controller scheme is validated with simulation in MATLAB in various operation conditions in three iterations. The simulation results show that the controller can stabilize the robot inside the pipe by converging the stabilizing states to zero and keeping them in zero with initial values between -25 degree and +25 degree and tracking velocities of 10cm/s, 30cm/s, and 50cm/s which makes the robot agile and dexterous for operation in pipelines.
Developing Personalized Models of Blood Pressure Estimation from Wearable Sensors Data Using Minimally-trained Domain Adversarial Neural Networks
Jul 24, 2020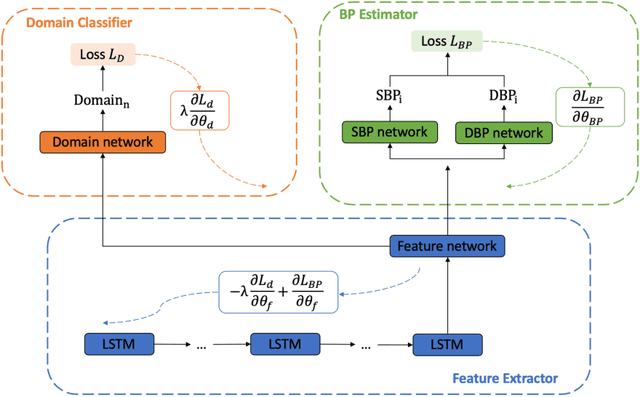
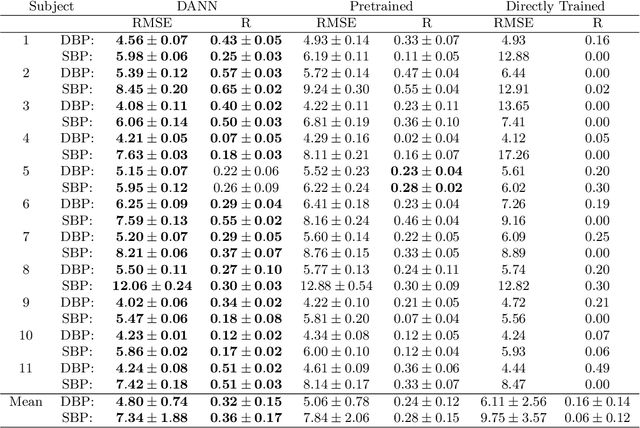
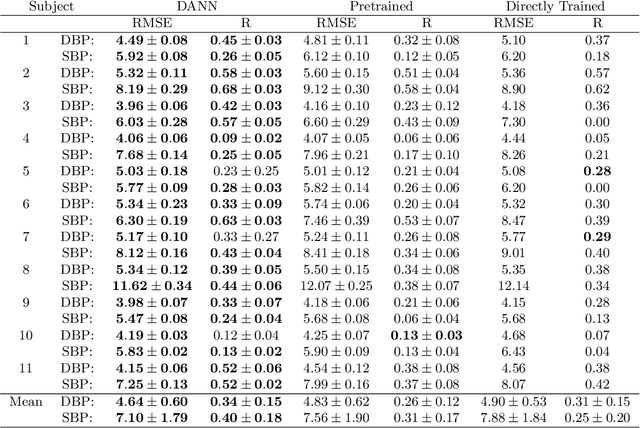
Blood pressure monitoring is an essential component of hypertension management and in the prediction of associated comorbidities. Blood pressure is a dynamic vital sign with frequent changes throughout a given day. Capturing blood pressure remotely and frequently (also known as ambulatory blood pressure monitoring) has traditionally been achieved by measuring blood pressure at discrete intervals using an inflatable cuff. However, there is growing interest in developing a cuffless ambulatory blood pressure monitoring system to measure blood pressure continuously. One such approach is by utilizing bioimpedance sensors to build regression models. A practical problem with this approach is that the amount of data required to confidently train such a regression model can be prohibitive. In this paper, we propose the application of the domain-adversarial training neural network (DANN) method on our multitask learning (MTL) blood pressure estimation model, allowing for knowledge transfer between subjects. Our proposed model obtains average root mean square error (RMSE) of $4.80 \pm 0.74$ mmHg for diastolic blood pressure and $7.34 \pm 1.88$ mmHg for systolic blood pressure when using three minutes of training data, $4.64 \pm 0.60$ mmHg and $7.10 \pm 1.79$ respectively when using four minutes of training data, and $4.48 \pm 0.57$ mmHg and $6.79 \pm 1.70$ respectively when using five minutes of training data. DANN improves training with minimal data in comparison to both directly training and to training with a pretrained model from another subject, decreasing RMSE by $0.19$ to $0.26$ mmHg (diastolic) and by $0.46$ to $0.67$ mmHg (systolic) in comparison to the best baseline models. We observe that four minutes of training data is the minimum requirement for our framework to exceed ISO standards within this cohort of patients.
A Survey of Challenges and Opportunities in Sensing and Analytics for Cardiovascular Disorders
Aug 12, 2019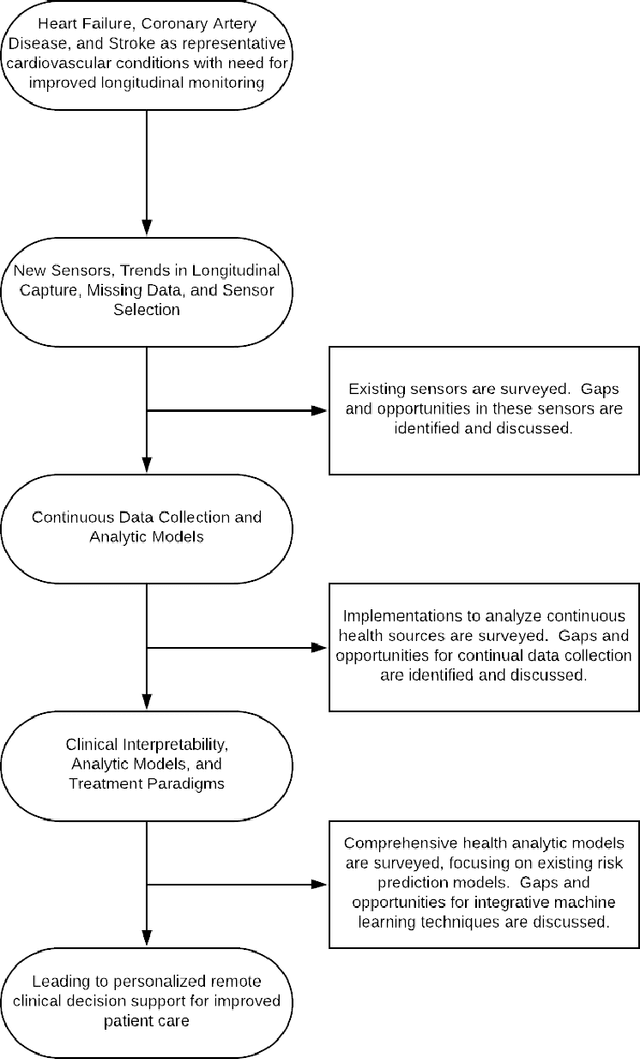
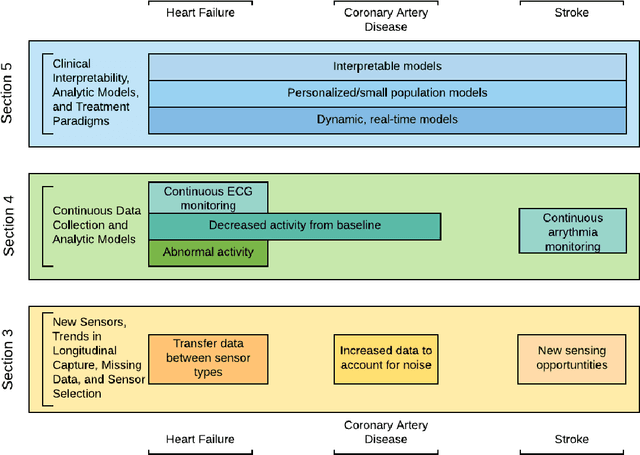
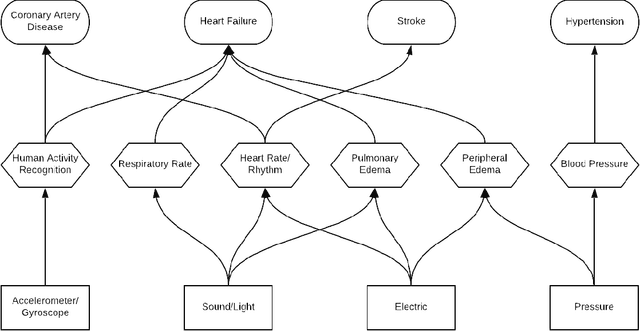
Cardiovascular disorders account for nearly 1 in 3 deaths in the United States. Care for these disorders are often determined during visits to acute care facilities, such as hospitals. While the length of stay in these settings represents just a small proportion of patients' lives, they account for a disproportionately large amount of decision making. To overcome this bias towards data from acute care settings, there is a need for longitudinal monitoring in patients with cardiovascular disorders. Longitudinal monitoring can provide a more comprehensive picture of patient health, allowing for more informed decision making. This work surveys the current field of sensing technologies and machine learning analytics that exist in the field of remote monitoring for cardiovascular disorders. We highlight three primary needs in the design of new smart health technologies: 1) the need for sensing technology that can track longitudinal trends in signs and symptoms of the cardiovascular disorder despite potentially infrequent, noisy, or missing data measurements; 2) the need for new analytic techniques that model data captured in a longitudinal, continual fashion to aid in the development of new risk prediction techniques and in tracking disease progression; and 3) the need for machine learning techniques that are personalized and interpretable, allowing for advancements in shared clinical decision making. We highlight these needs based upon the current state-of-the-art in smart health technologies and analytics and discuss the ample opportunities that exist in addressing all three needs in the development of smart health technologies and analytics applied to the field of cardiovascular disorders and care.