 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCataractSAM-2: A Domain-Adapted Model for Anterior Segment Surgery Segmentation and Scalable Ground-Truth Annotation
Mar 23, 2026We present CataractSAM-2, a domain-adapted extension of Meta's Segment Anything Model 2, designed for real-time semantic segmentation of cataract ophthalmic surgery videos with high accuracy. Positioned at the intersection of computer vision and medical robotics, CataractSAM-2 enables precise intraoperative perception crucial for robotic-assisted and computer-guided surgical systems. Furthermore, to alleviate the burden of manual labeling, we introduce an interactive annotation framework that combines sparse prompts with video-based mask propagation. This tool significantly reduces annotation time and facilitates the scalable creation of high-quality ground-truth masks, accelerating dataset development for ocular anterior segment surgeries. We also demonstrate the model's strong zero-shot generalization to glaucoma trabeculectomy procedures, confirming its cross-procedural utility and potential for broader surgical applications. The trained model and annotation toolkit are released as open-source resources, establishing CataractSAM-2 as a foundation for expanding anterior ophthalmic surgical datasets and advancing real-time AI-driven solutions in medical robotics, as well as surgical video understanding.
Machine Learning, Deep Learning and Data Preprocessing Techniques for Detection, Prediction, and Monitoring of Stress and Stress-related Mental Disorders: A Scoping Review
Aug 08, 2023



This comprehensive review systematically evaluates Machine Learning (ML) methodologies employed in the detection, prediction, and analysis of mental stress and its consequent mental disorders (MDs). Utilizing a rigorous scoping review process, the investigation delves into the latest ML algorithms, preprocessing techniques, and data types employed in the context of stress and stress-related MDs. The findings highlight that Support Vector Machine (SVM), Neural Network (NN), and Random Forest (RF) models consistently exhibit superior accuracy and robustness among all machine learning algorithms examined. Furthermore, the review underscores that physiological parameters, such as heart rate measurements and skin response, are prevalently used as stress predictors in ML algorithms. This is attributed to their rich explanatory information concerning stress and stress-related MDs, as well as the relative ease of data acquisition. Additionally, the application of dimensionality reduction techniques, including mappings, feature selection, filtering, and noise reduction, is frequently observed as a crucial step preceding the training of ML algorithms. The synthesis of this review identifies significant research gaps and outlines future directions for the field. These encompass areas such as model interpretability, model personalization, the incorporation of naturalistic settings, and real-time processing capabilities for detection and prediction of stress and stress-related MDs.
A Localization and Navigation Method for an In-pipe Robot in Water Distribution System through Wireless Control towards Long-Distance Inspection
May 21, 2021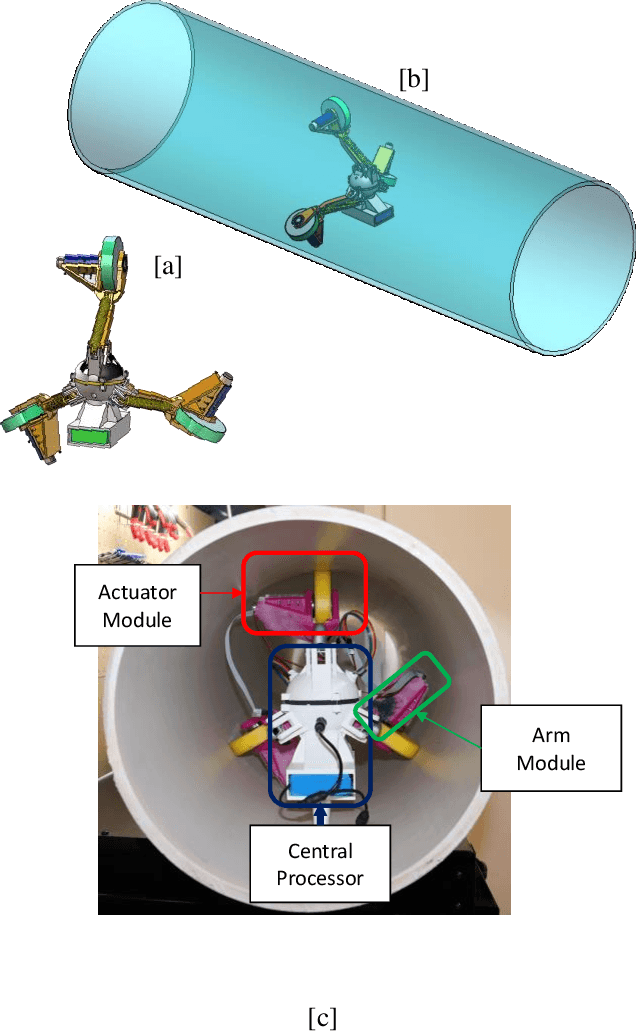
In this paper, we propose an operation procedure for our previously developed in-pipe robotic system that is used for water quality monitoring in water distribution systems (WDS). The proposed operation procedure synchronizes a developed wireless communication system that is suitable for harsh environments of soil, water, and rock with a multi-phase control algorithm. The new wireless control algorithm facilitates smart navigation and near real-time wireless data transmission during operation for our in-pipe robot in WDS. The smart navigation enables the robot to pass through different configurations of the pipeline with long inspection capability with a battery in which is mounted on the robot. To this end, we have divided the operation procedure into five steps that assign a specific motion control phase and wireless communication task to the robot. We describe each step and the algorithm associated with that step in this paper. The proposed robotic system defines the configuration type in each pipeline with the pre-programmed pipeline map that is given to the robot before the operation and the wireless communication system. The wireless communication system includes some relay nodes that perform bi-directional communication in the operation procedure. The developed wireless robotic system along with operation procedure facilitates localization and navigation for the robot toward long-distance inspection in WDS.
SmartCrawler: An In-pipe Robotic System with Wireless Communication in Water Distribution Systems
May 18, 2021

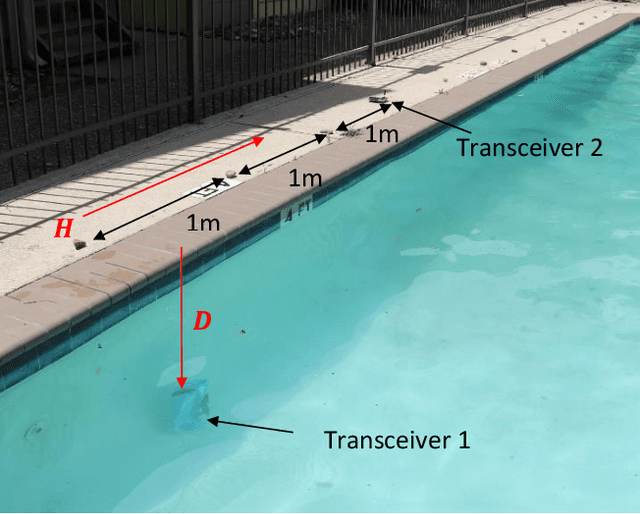
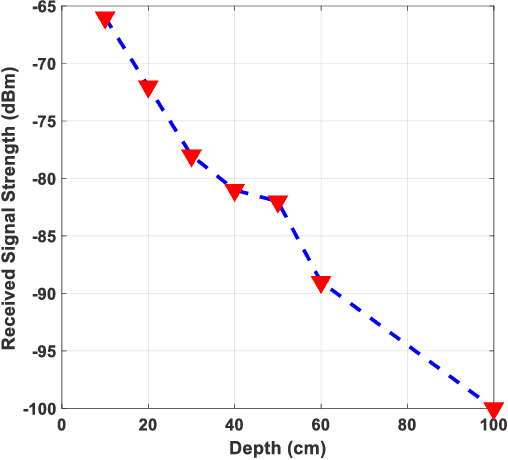
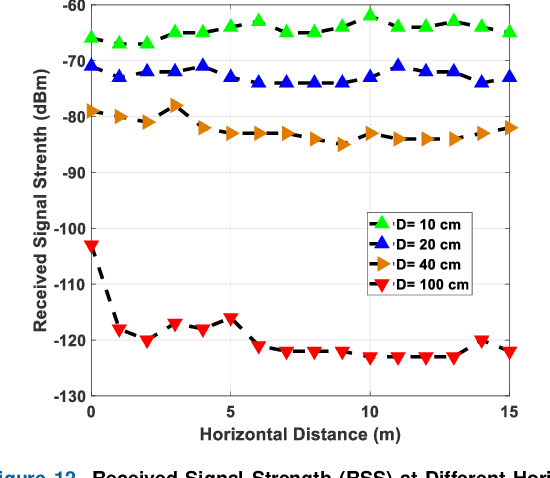
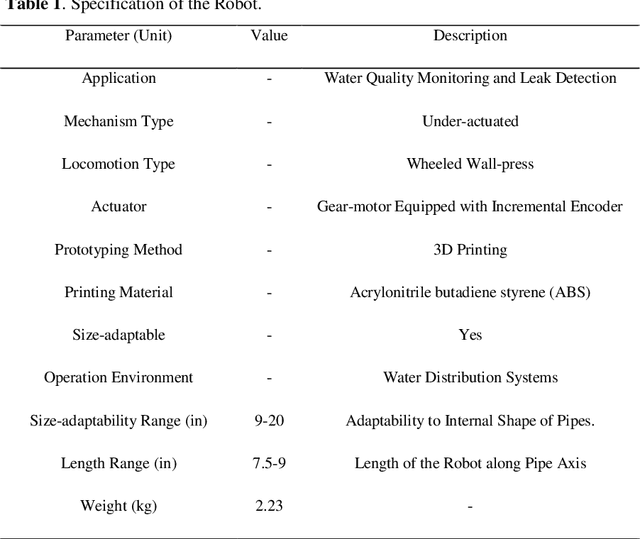
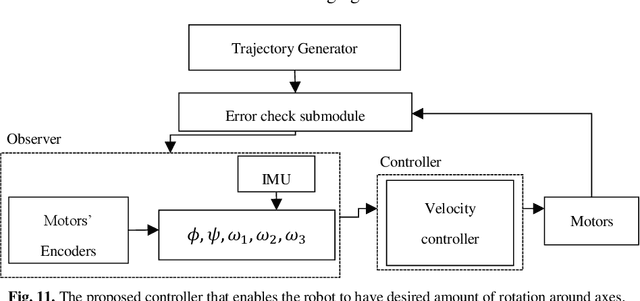
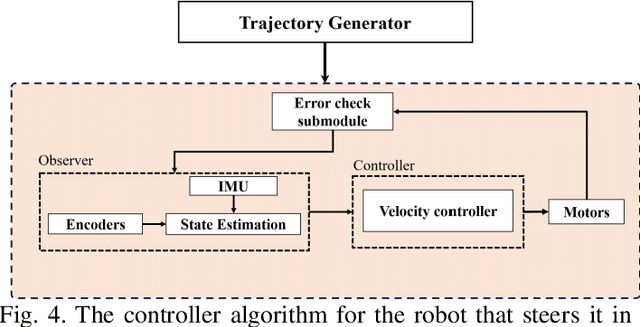
Water Distribution Systems(WDS) are critical infrastructures that deliver potable water to residential areas. Incidents to pipelines cause water loss and contamination in pipelines. Hence, water quality monitoring is one of the requirements for utility managers to ensure the health of water. However, it is challenging to access all parts of the WDS since they are long and comprise pipes with different configurations and sizes. In this paper, we propose a size-adaptable and modular in-pipe robot so-called SmartCrawler that works based on wheel wall press mechanism. We develop a two-phase motion control algorithm that enables reliable motion in straight and non-straight configurations of in-service pipelines. The controller in phase 1 stabilizes the robot in the straight paths and tracks the desired velocity with high-level linear quadratic regulator (LQR) and low-level proportional-integral-derivative (PID) based controllers. The controller in phase 2 with a designed error-check submodule and velocity controller, enables the robot to steer to the desired directions at non-straight configurations. The performance of the two-phase controller is evaluated with experimental and simulation results. Wireless underground communication is a challenging task for underground applications. We propose a bi-directional wireless sensor module based on active radio frequency identification (RFID) that works in 434MHz carrier frequency and evaluate its performance with experimental results. At the end of this work, we design the printed circuit board (PCB) for the SmartCrawler that embeds the electronic components in a confined and sealed environment. The simulation and the experimental results prove the proposed robotic system can be used for in pipe missions where wireless communication is needed to communicate with the robot during operation.
Towards Long-Distance Inspection for In-pipe Robots in Water Distribution Systems with Smart Navigation
May 11, 2021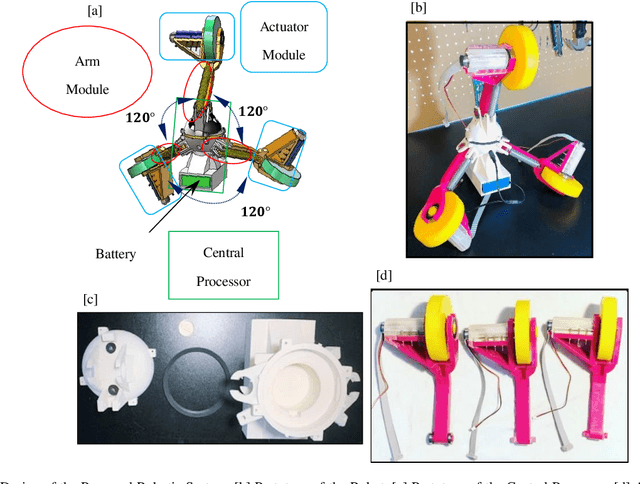
Incident in water distribution systems (WDS) cause water loss and water contamination that requires the utility managers to assess the condition of pipelines in a timely manner. However, pipelines are long and access to all parts of it is a chal-lenging task; current in-pipe robots have the limitations of short-distance inspection and inability to operate in-service networks. In this work, we improve the design of our previously developed in-pipe robot and analyze the effect of line pressure and relative velocity on the robot during operation with computational fluid dynamics (CFD) simulations. An extreme scenario for robot operation is defined and we estimate the minimum inspection distance for the robot with one turn of battery charge that is 5400m. A multi-phase motion controller is proposed that ensures reliable motion at straight and non-straight configurations of pipeline and also stabilized configuration with zero velocity at junctions. We also propose a localization and navigation method based on particle filtering and combine it with the proposed multi-phase motion controller. In this method, the map of the operation is provided to the robot and the robot localizes itself based on the map and the particle filtering method. Furthermore, the robot navigates different configurations of pipelines by switching between different phases of the motion controller algorithm that is performed by the particle filter algorithm. The experiment and simulation results show that the robot along with the navigation shows a promising solution towards long-distance inspection of pipelines by in-pipe robots.
Smart Navigation for an In-pipe Robot Through Multi-phase Motion Control and Particle Filtering Method
Feb 23, 2021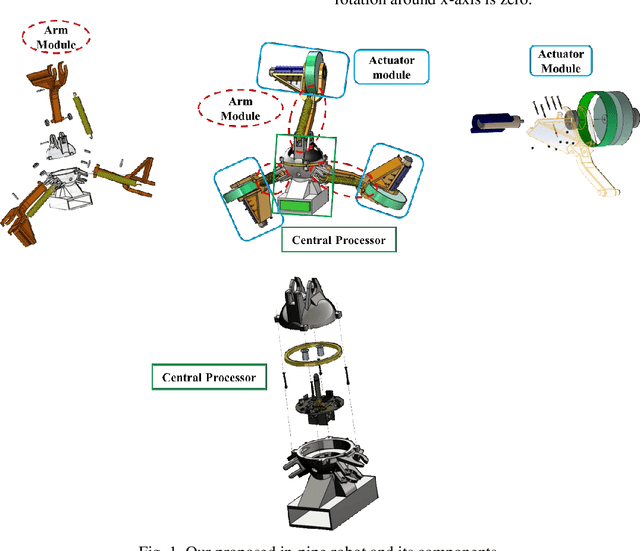
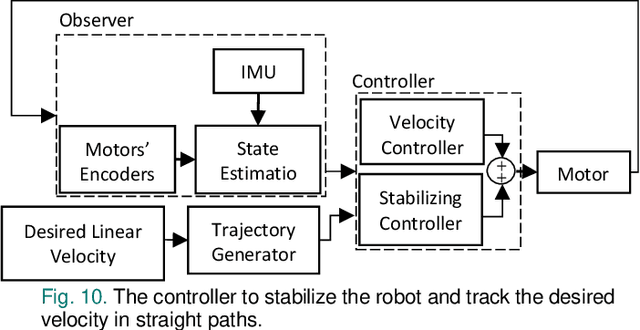
In-pipe robots are promising solutions for condition assessment, leak detection, water quality monitoring in a variety of other tasks in pipeline networks. Smart navigation is an extremely challenging task for these robots as a result of highly uncertain and disturbing environment for operation. Wireless communication to control these robots during operation is not feasible if the pipe material is metal since the radio signals are destroyed in the pipe environment, and hence, this challenge is still unsolved. In this paper, we introduce a method for smart navigation for our previously designed in-pipe robot [1] based on particle filtering and a two-phase motion controller. The robot is given the map of the operation path with a novel approach and the particle filtering determines the straight and non-straight configurations of the pipeline. In the straight paths, the robot follows a linear quadratic regulator (LQR) and proportional-integral-derivative (PID) based controller that stabilizes the robot and tracks a desired velocity. In non-straight paths, the robot follows the trajectory that a motion trajectory generator block plans for the robot. The proposed method is a promising solution for smart navigation without the need for wireless communication and capable of inspecting long distances in water distribution systems.
Design, Characterization, and Control of a Size Adaptable In-pipe Robot for Water Distribution Systems
Jan 17, 2021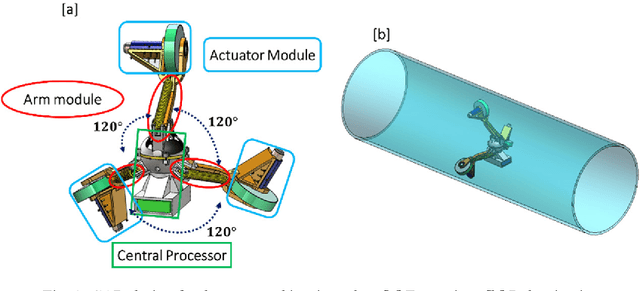
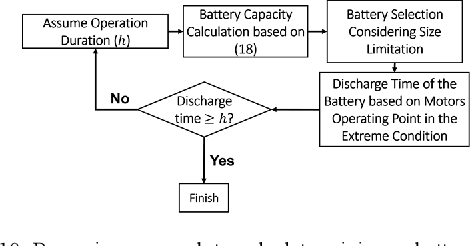
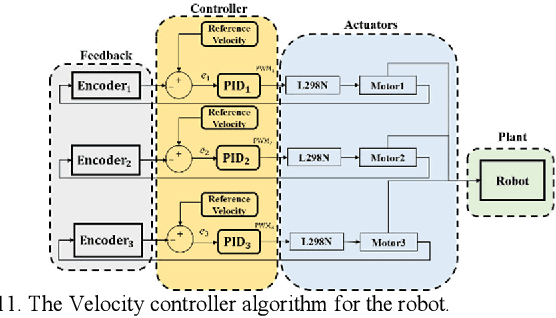
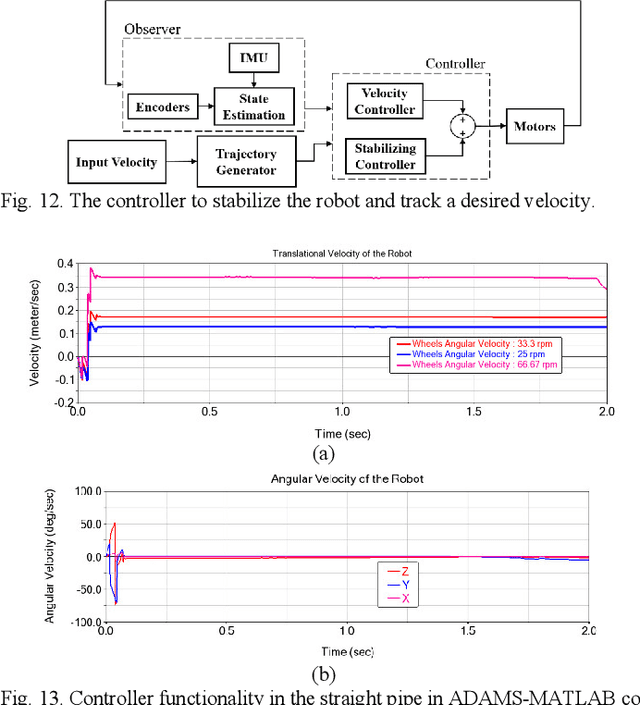
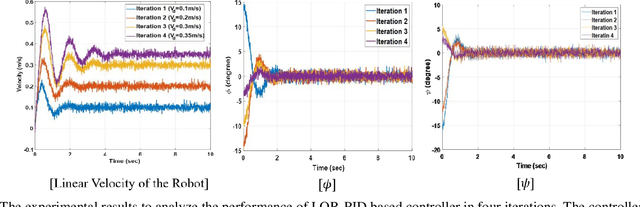
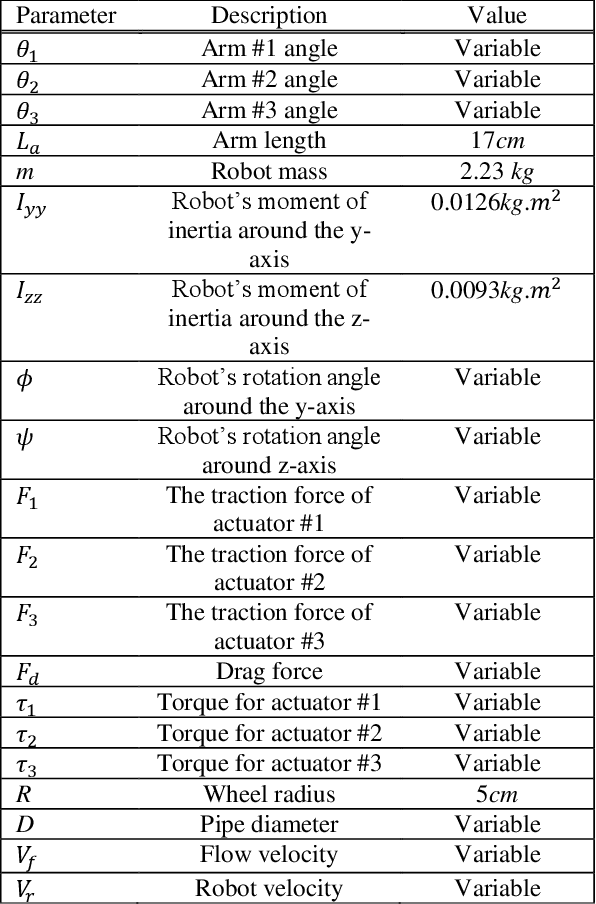
Leak detection and water quality monitoring are requirements and challenging tasks in Water Distribution Systems (WDS). In-line robots are designed for this aim. In our previous work, we designed an in-pipe robot [1]. In this research, we present the design of the central processor, characterize and control the robot based on the condition of operation in a highly pressurized environment of pipelines with the presence of high-speed flow. To this aim, an extreme operation condition is simulated with computational fluid dynamics (CFD) and the spring mechanism is characterized to ensure sufficient stabilizing force during operation based on the extreme operating condition. Also, an end-to-end method is suggested for power considerations for our robot that calculates minimum battery capacity and operation duration in the extreme operating condition. Finally, we design a novel LQR-PID based controller based on the system auxiliary matrices that retain the robot stability inside the pipeline against disturbances and uncertainties during operation. The ADAMS-MATLAB co-simulation of the robot-controller shows the rotational velocity with -4 degree/sec and +3 degree/sec margin around x, y, and z axes while the system tracks different desired velocities in pipelines (i.e. 0.12m/s, 0.17m/s, and 0.35m/s). Also, experimental results for four iterations in a 14-inch diameter PVC pipe show that the controller brings initial values of stabilizing states to zero and oscillate around it with a margin of 2 degrees and the system tracks desired velocities of 0.1m/s, 0.2m/s, 0.3m/s, and 0.35m/s in which makes the robot dexterous in uncertain and highly disturbed the environment of pipelines during operation.
An LQR-assisted Control Algorithm for an Under-actuated In-pipe Robot in Water Distribution Systems
Dec 29, 2020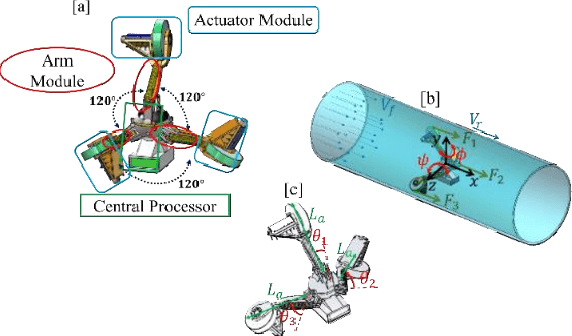
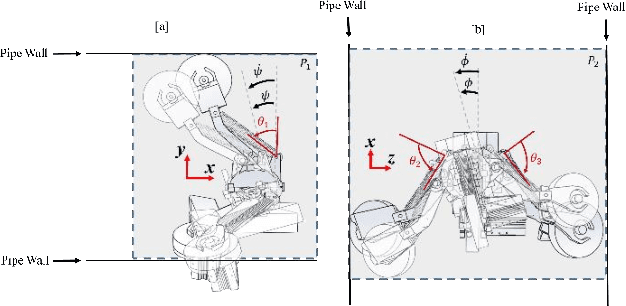
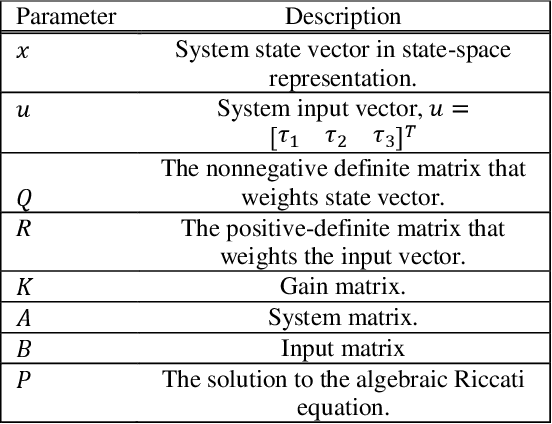
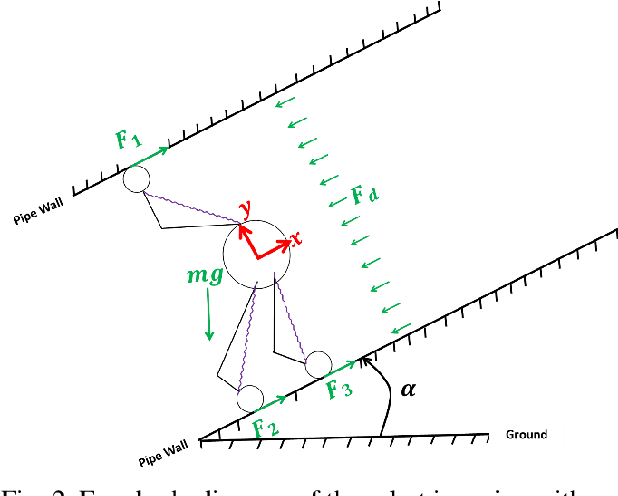
To address the operational challenges of in-pipe robots in large pipes of water distribution systems (WDS), in this research, a control algorithm is proposed for our previously designed robot [4]. Our size adaptable robot has an under-actuated modular design that can be used for both leak detection and quality monitoring. First, nonlinear dynamical governing equations of the robot are derived with the definition of two perpendicular planes, and two sets of states are defined for the robot for stabilization and mobilization. For stabilization, we calculated the auxiliary system matrices and designed a stabilizer controller based on the linear quadratic regulator (LQR) controller, and combined it with a proportional-integral-derivative (PID) based controller for mobilization. The controller scheme is validated with simulation in MATLAB in various operation conditions in three iterations. The simulation results show that the controller can stabilize the robot inside the pipe by converging the stabilizing states to zero and keeping them in zero with initial values between -25 degree and +25 degree and tracking velocities of 10cm/s, 30cm/s, and 50cm/s which makes the robot agile and dexterous for operation in pipelines.