 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Mental Stress Among College Students Using Heart Rate and Hand Acceleration Data Collected from Wearable Sensors
Sep 20, 2023



Stress is various mental health disorders including depression and anxiety among college students. Early stress diagnosis and intervention may lower the risk of developing mental illnesses. We examined a machine learning-based method for identification of stress using data collected in a naturalistic study utilizing self-reported stress as ground truth as well as physiological data such as heart rate and hand acceleration. The study involved 54 college students from a large campus who used wearable wrist-worn sensors and a mobile health (mHealth) application continuously for 40 days. The app gathered physiological data including heart rate and hand acceleration at one hertz frequency. The application also enabled users to self-report stress by tapping on the watch face, resulting in a time-stamped record of the self-reported stress. We created, evaluated, and analyzed machine learning algorithms for identifying stress episodes among college students using heart rate and accelerometer data. The XGBoost method was the most reliable model with an AUC of 0.64 and an accuracy of 84.5%. The standard deviation of hand acceleration, standard deviation of heart rate, and the minimum heart rate were the most important features for stress detection. This evidence may support the efficacy of identifying patterns in physiological reaction to stress using smartwatch sensors and may inform the design of future tools for real-time detection of stress.
Machine Learning, Deep Learning and Data Preprocessing Techniques for Detection, Prediction, and Monitoring of Stress and Stress-related Mental Disorders: A Scoping Review
Aug 08, 2023



This comprehensive review systematically evaluates Machine Learning (ML) methodologies employed in the detection, prediction, and analysis of mental stress and its consequent mental disorders (MDs). Utilizing a rigorous scoping review process, the investigation delves into the latest ML algorithms, preprocessing techniques, and data types employed in the context of stress and stress-related MDs. The findings highlight that Support Vector Machine (SVM), Neural Network (NN), and Random Forest (RF) models consistently exhibit superior accuracy and robustness among all machine learning algorithms examined. Furthermore, the review underscores that physiological parameters, such as heart rate measurements and skin response, are prevalently used as stress predictors in ML algorithms. This is attributed to their rich explanatory information concerning stress and stress-related MDs, as well as the relative ease of data acquisition. Additionally, the application of dimensionality reduction techniques, including mappings, feature selection, filtering, and noise reduction, is frequently observed as a crucial step preceding the training of ML algorithms. The synthesis of this review identifies significant research gaps and outlines future directions for the field. These encompass areas such as model interpretability, model personalization, the incorporation of naturalistic settings, and real-time processing capabilities for detection and prediction of stress and stress-related MDs.
SIMCNN -- Exploiting Computational Similarity to Accelerate CNN Training in Hardware
Oct 28, 2021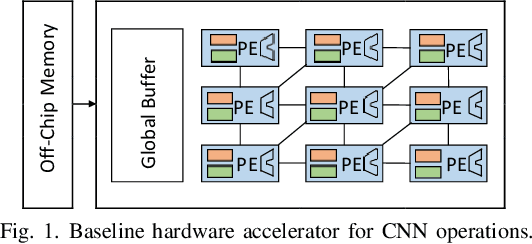


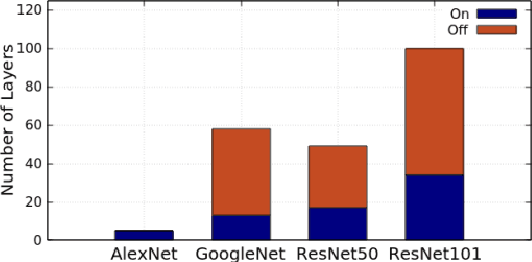
Convolution neural networks (CNN) are computation intensive to train. It consists of a substantial number of multidimensional dot products between many kernels and inputs. We observe that there are notable similarities among the vectors extracted from inputs (i.e., input vectors). If one input vector is similar to another one, its computations with the kernels are also similar to those of the other and therefore, can be skipped by reusing the already-computed results. Based on this insight, we propose a novel scheme based on locality sensitive hashing (LSH) to exploit the similarity of computations during CNN training in a hardware accelerator. The proposed scheme, called SIMCNN, uses a cache (SIMCACHE) to store LSH signatures of recent input vectors along with the computed results. If the LSH signature of a new input vector matches with that of an already existing vector in the SIMCACHE, the already-computed result is reused for the new vector. SIMCNN is the first work that exploits computational similarity for accelerating CNN training in hardware. The paper presents a detailed design, workflow, and implementation of SIMCNN. Our experimental evaluation with four different deep learning models shows that SIMCNN saves a significant number of computations and therefore, improves training time up to 43%.
A Self-rescue Mechanism for an In-pipe Robot for Large Obstacle Negotiation in Water Distribution Systems
Sep 15, 2021
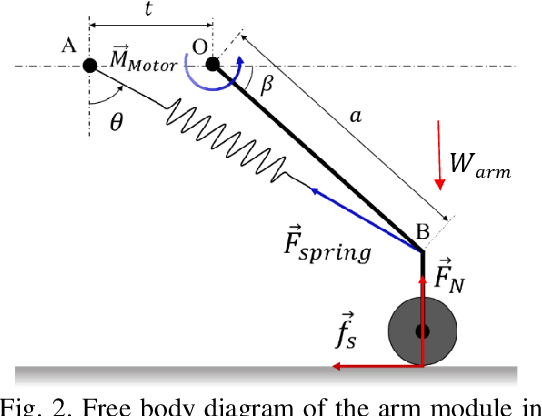
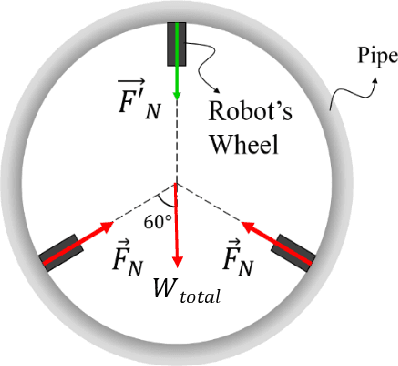
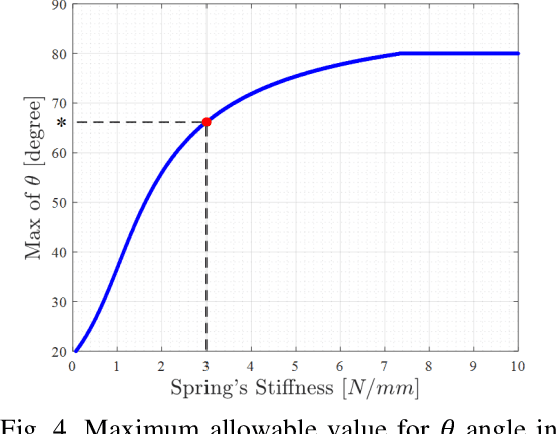
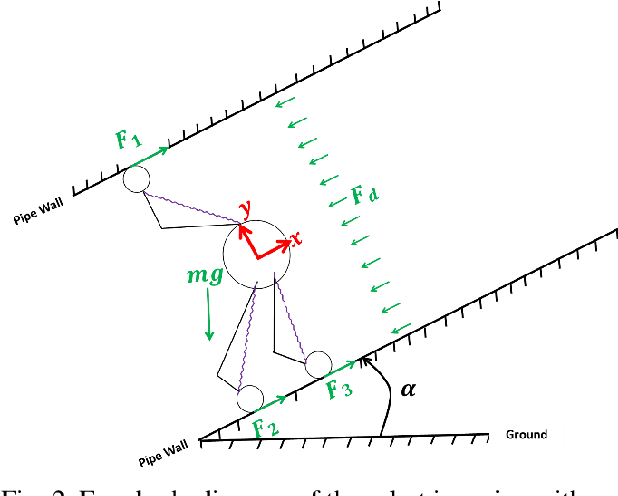
Water distribution systems (WDS) carry potable water with millions of miles of pipelines and deliver purified water to residential areas. The incidents in the WDS cause leak and water loss, which imposes pressure gradient and public health crisis. Hence, utility managers need to assess the condition of pipelines periodically and localize the leak location (in case it is reported). In our previous works, we designed and developed a size-adaptable modular in-pipe robot [1] and controlled its motion in in-service WDS. However, due to the linearization of the dynamical equations of the robot, the stabilizer controller which is a linear quadratic regulator (LQR) cannot stabilize the large deviations of the stabilizing states due to the presence of obstacles that fails the robot during operation. To this aim, we design a self-rescue mechanism for the robot in which three auxiliary gear-motors retract and extend the arm modules with the designed controller towards a reliable motion in the negotiation of large obstacles and non-straight configurations. Simulation results show that the proposed mechanism along with the motion controller enables the robot to have an improved motion in pipelines.
OpenSync: An opensource platform for synchronizing multiple measures in neuroscience experiments
Jul 29, 2021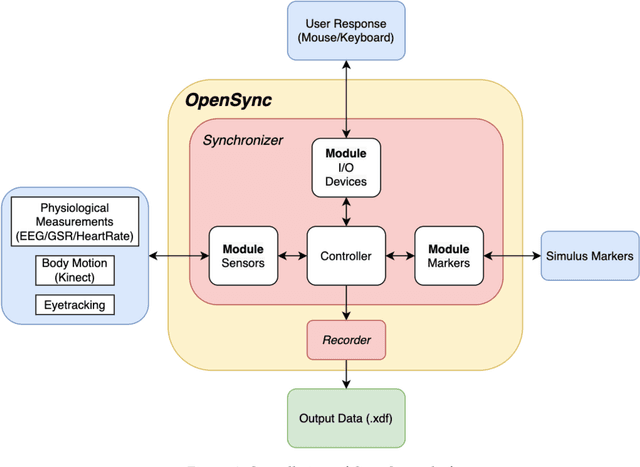
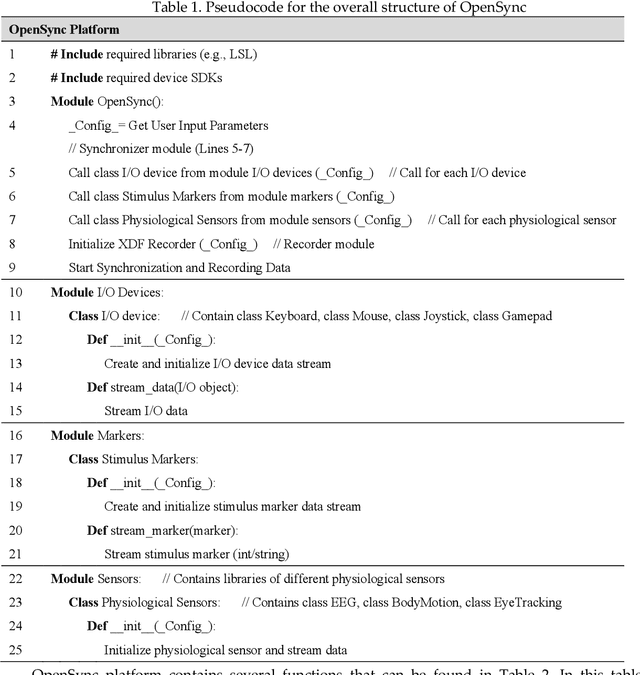


Background: The human mind is multimodal. Yet most behavioral studies rely on century-old measures such as task accuracy and latency. To create a better understanding of human behavior and brain functionality, we should introduce other measures and analyze behavior from various aspects. However, it is technically complex and costly to design and implement the experiments that record multiple measures. To address this issue, a platform that allows synchronizing multiple measures from human behavior is needed. Method: This paper introduces an opensource platform named OpenSync, which can be used to synchronize multiple measures in neuroscience experiments. This platform helps to automatically integrate, synchronize and record physiological measures (e.g., electroencephalogram (EEG), galvanic skin response (GSR), eye-tracking, body motion, etc.), user input response (e.g., from mouse, keyboard, joystick, etc.), and task-related information (stimulus markers). In this paper, we explain the structure and details of OpenSync, provide two case studies in PsychoPy and Unity. Comparison with existing tools: Unlike proprietary systems (e.g., iMotions), OpenSync is free and it can be used inside any opensource experiment design software (e.g., PsychoPy, OpenSesame, Unity, etc., https://pypi.org/project/OpenSync/ and https://github.com/moeinrazavi/OpenSync_Unity). Results: Our experimental results show that the OpenSync platform is able to synchronize multiple measures with microsecond resolution.
Factors affecting the COVID-19 risk in the US counties: an innovative approach by combining unsupervised and supervised learning
Jun 24, 2021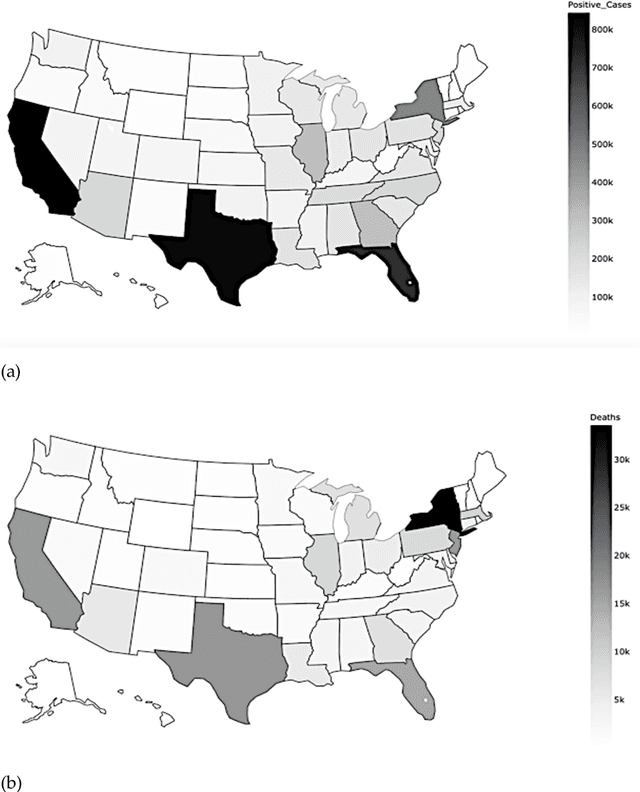
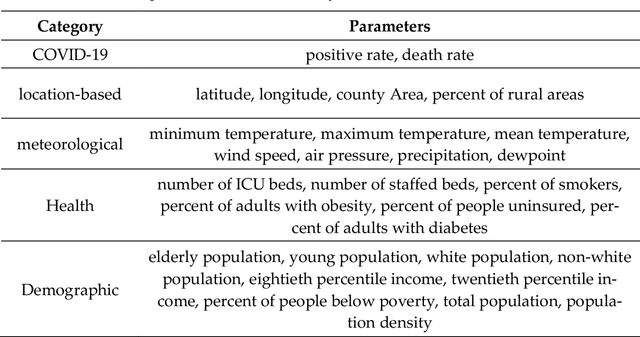
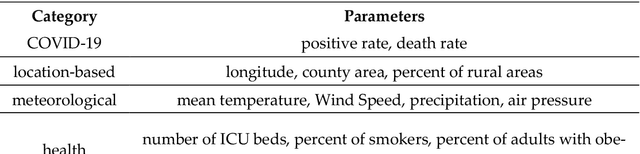

The COVID-19 disease spreads swiftly, and nearly three months after the first positive case was confirmed in China, Coronavirus started to spread all over the United States. Some states and counties reported high number of positive cases and deaths, while some reported lower COVID-19 related cases and mortality. In this paper, the factors that could affect the risk of COVID-19 infection and mortality were analyzed in county level. An innovative method by using K-means clustering and several classification models is utilized to determine the most critical factors. Results showed that mean temperature, percent of people below poverty, percent of adults with obesity, air pressure, population density, wind speed, longitude, and percent of uninsured people were the most significant attributes
Smart Navigation for an In-pipe Robot Through Multi-phase Motion Control and Particle Filtering Method
Feb 23, 2021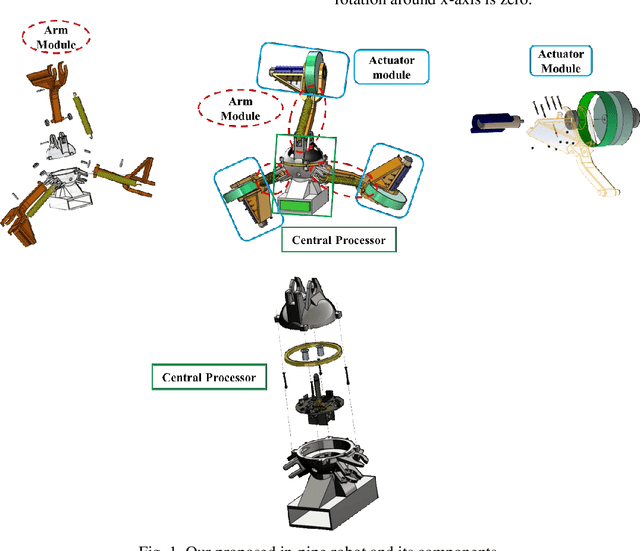
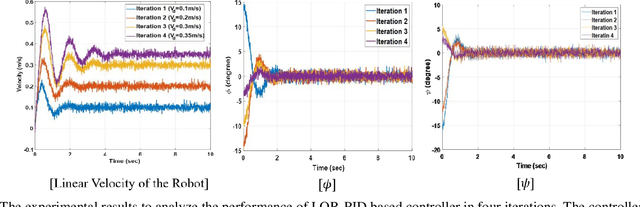
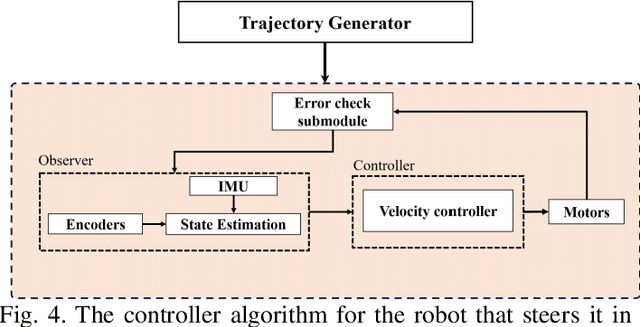
In-pipe robots are promising solutions for condition assessment, leak detection, water quality monitoring in a variety of other tasks in pipeline networks. Smart navigation is an extremely challenging task for these robots as a result of highly uncertain and disturbing environment for operation. Wireless communication to control these robots during operation is not feasible if the pipe material is metal since the radio signals are destroyed in the pipe environment, and hence, this challenge is still unsolved. In this paper, we introduce a method for smart navigation for our previously designed in-pipe robot [1] based on particle filtering and a two-phase motion controller. The robot is given the map of the operation path with a novel approach and the particle filtering determines the straight and non-straight configurations of the pipeline. In the straight paths, the robot follows a linear quadratic regulator (LQR) and proportional-integral-derivative (PID) based controller that stabilizes the robot and tracks a desired velocity. In non-straight paths, the robot follows the trajectory that a motion trajectory generator block plans for the robot. The proposed method is a promising solution for smart navigation without the need for wireless communication and capable of inspecting long distances in water distribution systems.
An Automatic System to Monitor the Physical Distance and Face Mask Wearing of Construction Workers in COVID-19 Pandemic
Jan 30, 2021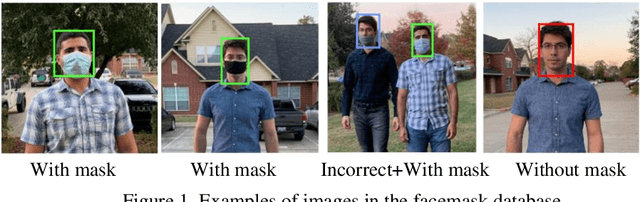

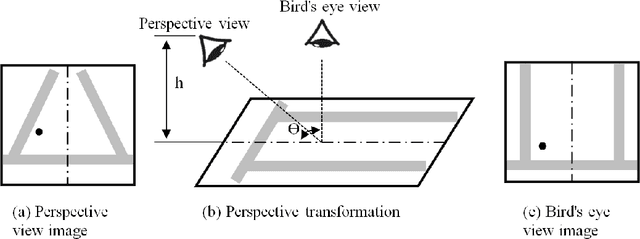
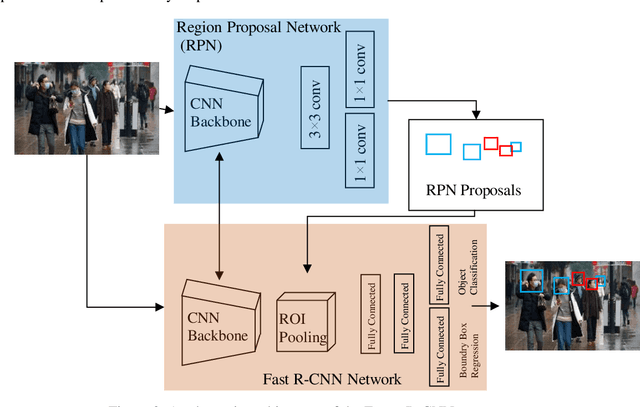
The COVID-19 pandemic has caused many shutdowns in different industries around the world. Sectors such as infrastructure construction and maintenance projects have not been suspended due to their significant effect on people's routine life. In such projects, workers work close together that makes a high risk of infection. The World Health Organization recommends wearing a face mask and practicing physical distancing to mitigate the virus's spread. This paper developed a computer vision system to automatically detect the violation of face mask wearing and physical distancing among construction workers to assure their safety on infrastructure projects during the pandemic. For the face mask detection, the paper collected and annotated 1,000 images, including different types of face mask wearing, and added them to a pre-existing face mask dataset to develop a dataset of 1,853 images. Then trained and tested multiple Tensorflow state-of-the-art object detection models on the face mask dataset and chose the Faster R-CNN Inception ResNet V2 network that yielded the accuracy of 99.8%. For physical distance detection, the paper employed the Faster R-CNN Inception V2 to detect people. A transformation matrix was used to eliminate the camera angle's effect on the object distances on the image. The Euclidian distance used the pixels of the transformed image to compute the actual distance between people. A threshold of six feet was considered to capture physical distance violation. The paper also used transfer learning for training the model. The final model was applied on four videos of road maintenance projects in Houston, TX, that effectively detected the face mask and physical distance. We recommend that construction owners use the proposed system to enhance construction workers' safety in the pandemic situation.