 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Dimensional Surrogate Modeling for Closed-Loop Learning of Neural-Network-Parameterized Model Predictive Control
Dec 12, 2025Learning controller parameters from closed-loop data has been shown to improve closed-loop performance. Bayesian optimization, a widely used black-box and sample-efficient learning method, constructs a probabilistic surrogate of the closed-loop performance from few experiments and uses it to select informative controller parameters. However, it typically struggles with dense high-dimensional controller parameterizations, as they may appear, for example, in tuning model predictive controllers, because standard surrogate models fail to capture the structure of such spaces. This work suggests that the use of Bayesian neural networks as surrogate models may help to mitigate this limitation. Through a comparison between Gaussian processes with Matern kernels, finite-width Bayesian neural networks, and infinite-width Bayesian neural networks on a cart-pole task, we find that Bayesian neural network surrogate models achieve faster and more reliable convergence of the closed-loop cost and enable successful optimization of parameterizations with hundreds of dimensions. Infinite-width Bayesian neural networks also maintain performance in settings with more than one thousand parameters, whereas Matern-kernel Gaussian processes rapidly lose effectiveness. These results indicate that Bayesian neural network surrogate models may be suitable for learning dense high-dimensional controller parameterizations and offer practical guidance for selecting surrogate models in learning-based controller design.
Efficient Learning of Vehicle Controller Parameters via Multi-Fidelity Bayesian Optimization: From Simulation to Experiment
Jun 10, 2025Parameter tuning for vehicle controllers remains a costly and time-intensive challenge in automotive development. Traditional approaches rely on extensive real-world testing, making the process inefficient. We propose a multi-fidelity Bayesian optimization approach that efficiently learns optimal controller parameters by leveraging both low-fidelity simulation data and a very limited number of real-world experiments. Our approach significantly reduces the need for manual tuning and expensive field testing while maintaining the standard two-stage development workflow used in industry. The core contribution is the integration of an auto-regressive multi-fidelity Gaussian process model into Bayesian optimization, enabling knowledge transfer between different fidelity levels without requiring additional low-fidelity evaluations during real-world testing. We validate our approach through both simulation studies and realworld experiments. The results demonstrate that our method achieves high-quality controller performance with only very few real-world experiments, highlighting its potential as a practical and scalable solution for intelligent vehicle control tuning in industrial applications.
A Modular Energy Aware Framework for Multicopter Modeling in Control and Planning Applications
Apr 04, 2025Unmanned aerial vehicles (UAVs), especially multicopters, have recently gained popularity for use in surveillance, monitoring, inspection, and search and rescue missions. Their maneuverability and ability to operate in confined spaces make them particularly useful in cluttered environments. For advanced control and mission planning applications, accurate and resource-efficient modeling of UAVs and their capabilities is essential. This study presents a modular approach to multicopter modeling that considers vehicle dynamics, energy consumption, and sensor integration. The power train model includes detailed descriptions of key components such as the lithium-ion battery, electronic speed controllers, and brushless DC motors. Their models are validated with real test flight data. In addition, sensor models, including LiDAR and cameras, are integrated to describe the equipment often used in surveillance and monitoring missions. The individual models are combined into an energy-aware multicopter model, which provide the basis for a companion study on path planning for unmanned aircaft system (UAS) swarms performing search and rescue missions in cluttered and dynamic environments. The flexible modeling approach enables easy description of different UAVs in a heterogeneous UAS swarm, allowing for energy-efficient operations and autonomous decision making for a reliable mission performance.
Energy Aware and Safe Path Planning for Unmanned Aircraft Systems
Apr 04, 2025
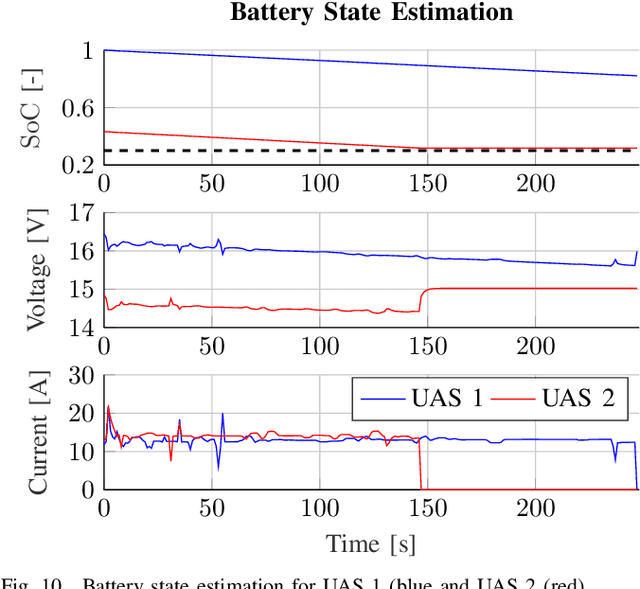


This paper proposes a path planning algorithm for multi-agent unmanned aircraft systems (UASs) to autonomously cover a search area, while considering obstacle avoidance, as well as the capabilities and energy consumption of the employed unmanned aerial vehicles. The path planning is optimized in terms of energy efficiency to prefer low energy-consuming maneuvers. In scenarios where a UAS is low on energy, it autonomously returns to its initial position for a safe landing, thus preventing potential battery damage. To accomplish this, an energy-aware multicopter model is integrated into a path planning algorithm based on model predictive control and mixed integer linear programming. Besides factoring in energy consumption, the planning is improved by dynamically defining feasible regions for each UAS to prevent obstacle corner-cutting or over-jumping.
Exploiting Prior Knowledge in Preferential Learning of Individualized Autonomous Vehicle Driving Styles
Mar 19, 2025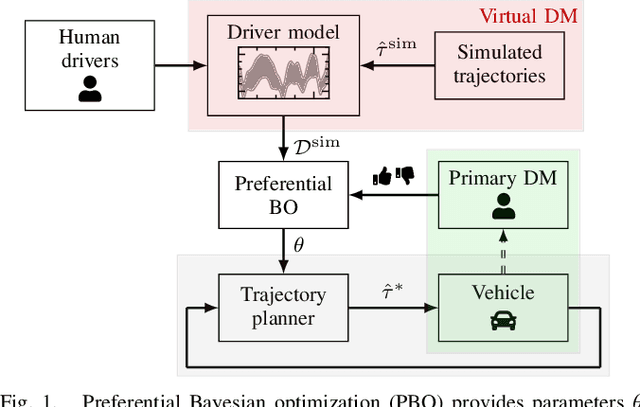
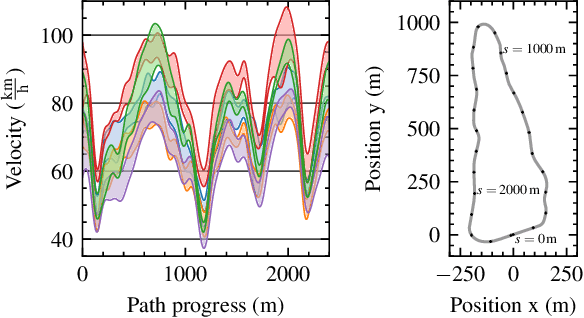
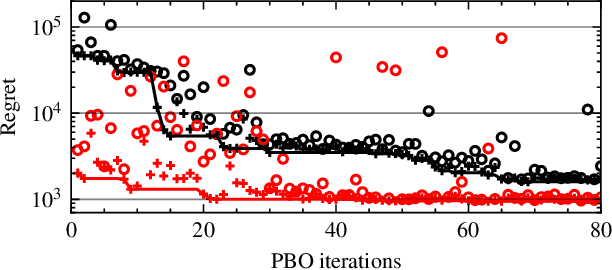
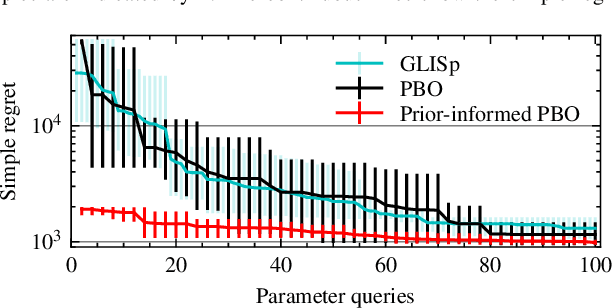
Trajectory planning for automated vehicles commonly employs optimization over a moving horizon - Model Predictive Control - where the cost function critically influences the resulting driving style. However, finding a suitable cost function that results in a driving style preferred by passengers remains an ongoing challenge. We employ preferential Bayesian optimization to learn the cost function by iteratively querying a passenger's preference. Due to increasing dimensionality of the parameter space, preference learning approaches might struggle to find a suitable optimum with a limited number of experiments and expose the passenger to discomfort when exploring the parameter space. We address these challenges by incorporating prior knowledge into the preferential Bayesian optimization framework. Our method constructs a virtual decision maker from real-world human driving data to guide parameter sampling. In a simulation experiment, we achieve faster convergence of the prior-knowledge-informed learning procedure compared to existing preferential Bayesian optimization approaches and reduce the number of inadequate driving styles sampled.
Imitation Learning of MPC with Neural Networks: Error Guarantees and Sparsification
Jan 07, 2025This paper presents a framework for bounding the approximation error in imitation model predictive controllers utilizing neural networks. Leveraging the Lipschitz properties of these neural networks, we derive a bound that guides dataset design to ensure the approximation error remains at chosen limits. We discuss how this method can be used to design a stable neural network controller with performance guarantees employing existing robust model predictive control approaches for data generation. Additionally, we introduce a training adjustment, which is based on the sensitivities of the optimization problem and reduces dataset density requirements based on the derived bounds. We verify that the proposed augmentation results in improvements to the network's predictive capabilities and a reduction of the Lipschitz constant. Moreover, on a simulated inverted pendulum problem, we show that the approach results in a closer match of the closed-loop behavior between the imitation and the original model predictive controller.
Time-Series-Informed Closed-loop Learning for Sequential Decision Making and Control
Dec 03, 2024


Closed-loop performance of sequential decision making algorithms, such as model predictive control, depends strongly on the parameters of cost functions, models, and constraints. Bayesian optimization is a common approach to learning these parameters based on closed-loop experiments. However, traditional Bayesian optimization approaches treat the learning problem as a black box, ignoring valuable information and knowledge about the structure of the underlying problem, resulting in slow convergence and high experimental resource use. We propose a time-series-informed optimization framework that incorporates intermediate performance evaluations from early iterations of each experimental episode into the learning procedure. Additionally, probabilistic early stopping criteria are proposed to terminate unpromising experiments, significantly reducing experimental time. Simulation results show that our approach achieves baseline performance with approximately half the resources. Moreover, with the same resource budget, our approach outperforms the baseline in terms of final closed-loop performance, highlighting its efficiency in sequential decision making scenarios.
Interpretation of High-Dimensional Regression Coefficients by Comparison with Linearized Compressing Features
Nov 18, 2024Linear regression is often deemed inherently interpretable; however, challenges arise for high-dimensional data. We focus on further understanding how linear regression approximates nonlinear responses from high-dimensional functional data, motivated by predicting cycle life for lithium-ion batteries. We develop a linearization method to derive feature coefficients, which we compare with the closest regression coefficients of the path of regression solutions. We showcase the methods on battery data case studies where a single nonlinear compressing feature, $g\colon \mathbb{R}^p \to \mathbb{R}$, is used to construct a synthetic response, $\mathbf{y} \in \mathbb{R}$. This unifying view of linear regression and compressing features for high-dimensional functional data helps to understand (1) how regression coefficients are shaped in the highly regularized domain and how they relate to linearized feature coefficients and (2) how the shape of regression coefficients changes as a function of regularization to approximate nonlinear responses by exploiting local structures.
Safe and High-Performance Learning of Model Predicitve Control using Kernel-Based Interpolation
Oct 09, 2024
We present a method, which allows efficient and safe approximation of model predictive controllers using kernel interpolation. Since the computational complexity of the approximating function scales linearly with the number of data points, we propose to use a scoring function which chooses the most promising data. To further reduce the complexity of the approximation, we restrict our considerations to the set of closed-loop reachable states. That is, the approximating function only has to be accurate within this set. This makes our method especially suited for systems, where the set of initial conditions is small. In order to guarantee safety and high performance of the designed approximated controller, we use reachability analysis based on Monte Carlo methods.
Safe Learning-Based Optimization of Model Predictive Control: Application to Battery Fast-Charging
Oct 07, 2024Model predictive control (MPC) is a powerful tool for controlling complex nonlinear systems under constraints, but often struggles with model uncertainties and the design of suitable cost functions. To address these challenges, we discuss an approach that integrates MPC with safe Bayesian optimization to optimize long-term closed-loop performance despite significant model-plant mismatches. By parameterizing the MPC stage cost function using a radial basis function network, we employ Bayesian optimization as a multi-episode learning strategy to tune the controller without relying on precise system models. This method mitigates conservativeness introduced by overly cautious soft constraints in the MPC cost function and provides probabilistic safety guarantees during learning, ensuring that safety-critical constraints are met with high probability. As a practical application, we apply our approach to fast charging of lithium-ion batteries, a challenging task due to the complicated battery dynamics and strict safety requirements, subject to the requirement to be implementable in real time. Simulation results demonstrate that, in the context of model-plant mismatch, our method reduces charging times compared to traditional MPC methods while maintaining safety. This work extends previous research by emphasizing closed-loop constraint satisfaction and offers a promising solution for enhancing performance in systems where model uncertainties and safety are critical concerns.