 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Dimensional Surrogate Modeling for Closed-Loop Learning of Neural-Network-Parameterized Model Predictive Control
Dec 12, 2025Learning controller parameters from closed-loop data has been shown to improve closed-loop performance. Bayesian optimization, a widely used black-box and sample-efficient learning method, constructs a probabilistic surrogate of the closed-loop performance from few experiments and uses it to select informative controller parameters. However, it typically struggles with dense high-dimensional controller parameterizations, as they may appear, for example, in tuning model predictive controllers, because standard surrogate models fail to capture the structure of such spaces. This work suggests that the use of Bayesian neural networks as surrogate models may help to mitigate this limitation. Through a comparison between Gaussian processes with Matern kernels, finite-width Bayesian neural networks, and infinite-width Bayesian neural networks on a cart-pole task, we find that Bayesian neural network surrogate models achieve faster and more reliable convergence of the closed-loop cost and enable successful optimization of parameterizations with hundreds of dimensions. Infinite-width Bayesian neural networks also maintain performance in settings with more than one thousand parameters, whereas Matern-kernel Gaussian processes rapidly lose effectiveness. These results indicate that Bayesian neural network surrogate models may be suitable for learning dense high-dimensional controller parameterizations and offer practical guidance for selecting surrogate models in learning-based controller design.
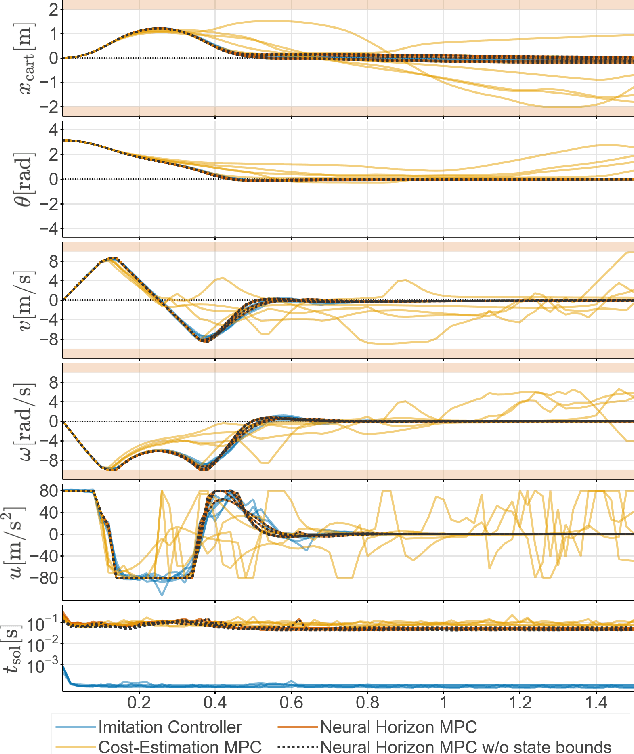
Imitation Learning of MPC with Neural Networks: Error Guarantees and Sparsification
Jan 07, 2025This paper presents a framework for bounding the approximation error in imitation model predictive controllers utilizing neural networks. Leveraging the Lipschitz properties of these neural networks, we derive a bound that guides dataset design to ensure the approximation error remains at chosen limits. We discuss how this method can be used to design a stable neural network controller with performance guarantees employing existing robust model predictive control approaches for data generation. Additionally, we introduce a training adjustment, which is based on the sensitivities of the optimization problem and reduces dataset density requirements based on the derived bounds. We verify that the proposed augmentation results in improvements to the network's predictive capabilities and a reduction of the Lipschitz constant. Moreover, on a simulated inverted pendulum problem, we show that the approach results in a closer match of the closed-loop behavior between the imitation and the original model predictive controller.
Neural Horizon Model Predictive Control -- Increasing Computational Efficiency with Neural Networks
Aug 19, 2024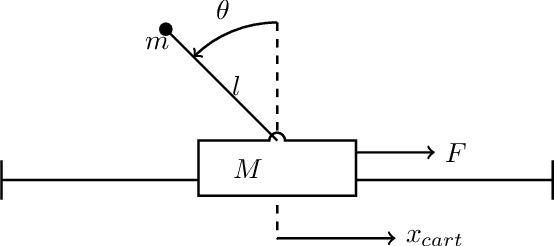
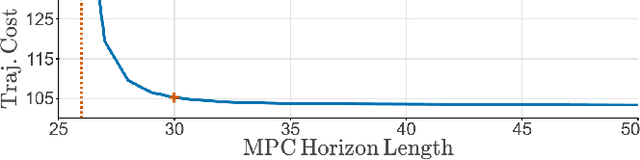
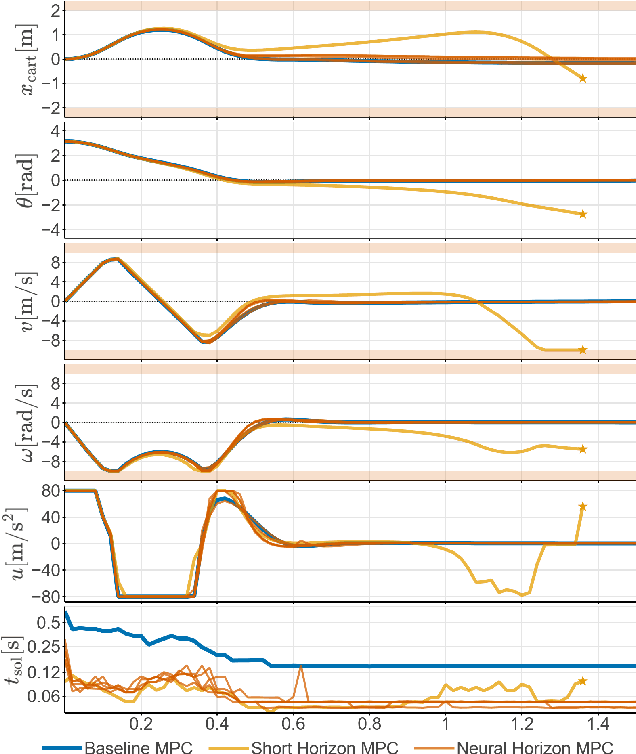
The expansion in automation of increasingly fast applications and low-power edge devices poses a particular challenge for optimization based control algorithms, like model predictive control. Our proposed machine-learning supported approach addresses this by utilizing a feed-forward neural network to reduce the computation load of the online-optimization. We propose approximating part of the problem horizon, while maintaining safety guarantees -- constraint satisfaction -- via the remaining optimization part of the controller. The approach is validated in simulation, demonstrating an improvement in computational efficiency, while maintaining guarantees and near-optimal performance. The proposed MPC scheme can be applied to a wide range of applications, including those requiring a rapid control response, such as robotics and embedded applications with limited computational resources.