 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Learning-Based Optimization of Model Predictive Control: Application to Battery Fast-Charging
Oct 07, 2024



Model predictive control (MPC) is a powerful tool for controlling complex nonlinear systems under constraints, but often struggles with model uncertainties and the design of suitable cost functions. To address these challenges, we discuss an approach that integrates MPC with safe Bayesian optimization to optimize long-term closed-loop performance despite significant model-plant mismatches. By parameterizing the MPC stage cost function using a radial basis function network, we employ Bayesian optimization as a multi-episode learning strategy to tune the controller without relying on precise system models. This method mitigates conservativeness introduced by overly cautious soft constraints in the MPC cost function and provides probabilistic safety guarantees during learning, ensuring that safety-critical constraints are met with high probability. As a practical application, we apply our approach to fast charging of lithium-ion batteries, a challenging task due to the complicated battery dynamics and strict safety requirements, subject to the requirement to be implementable in real time. Simulation results demonstrate that, in the context of model-plant mismatch, our method reduces charging times compared to traditional MPC methods while maintaining safety. This work extends previous research by emphasizing closed-loop constraint satisfaction and offers a promising solution for enhancing performance in systems where model uncertainties and safety are critical concerns.
Learning Model Predictive Control Parameters via Bayesian Optimization for Battery Fast Charging
Apr 09, 2024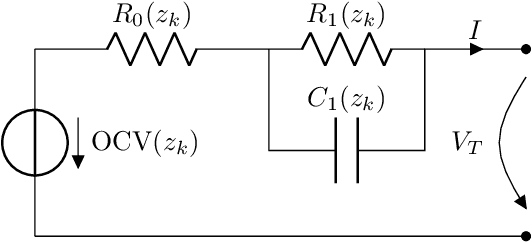
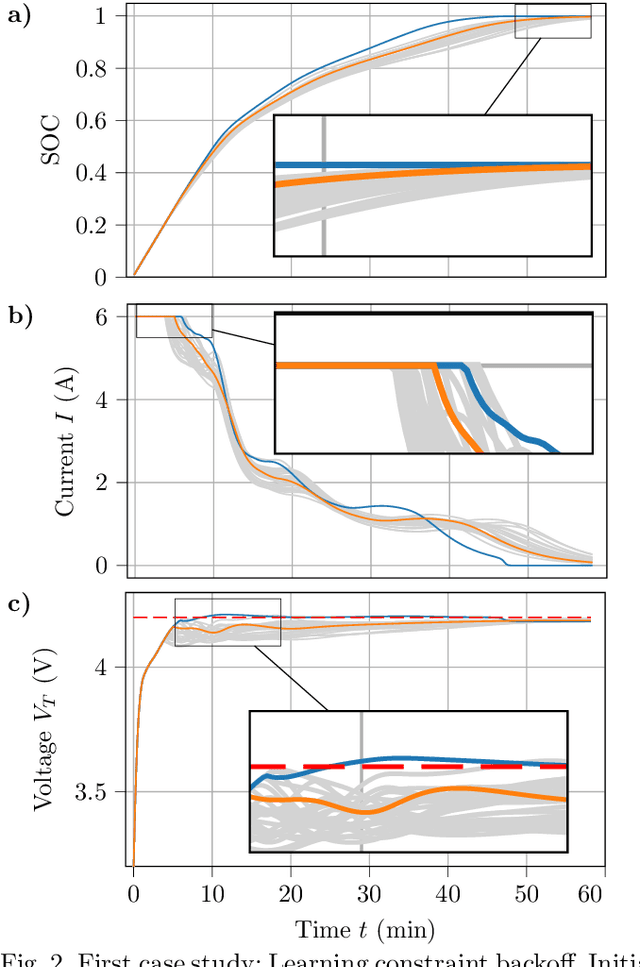
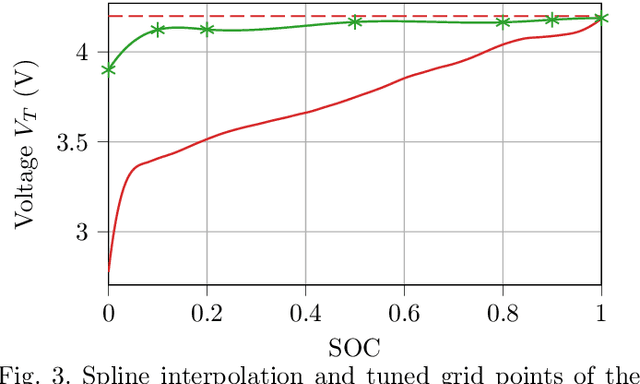
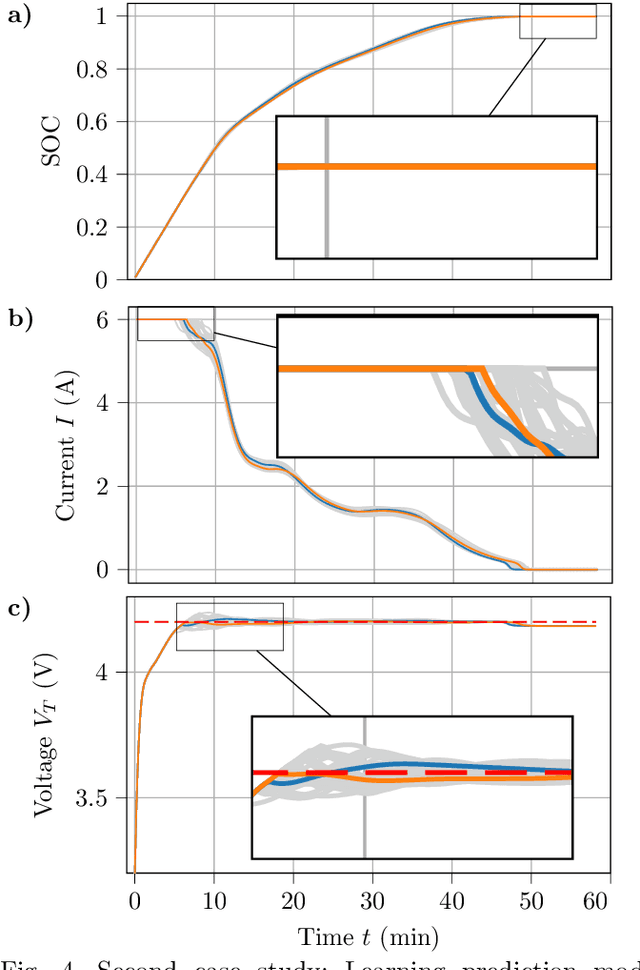
Tuning parameters in model predictive control (MPC) presents significant challenges, particularly when there is a notable discrepancy between the controller's predictions and the actual behavior of the closed-loop plant. This mismatch may stem from factors like substantial model-plant differences, limited prediction horizons that do not cover the entire time of interest, or unforeseen system disturbances. Such mismatches can jeopardize both performance and safety, including constraint satisfaction. Traditional methods address this issue by modifying the finite horizon cost function to better reflect the overall operational cost, learning parts of the prediction model from data, or implementing robust MPC strategies, which might be either computationally intensive or overly cautious. As an alternative, directly optimizing or learning the controller parameters to enhance closed-loop performance has been proposed. We apply Bayesian optimization for efficient learning of unknown model parameters and parameterized constraint backoff terms, aiming to improve closed-loop performance of battery fast charging. This approach establishes a hierarchical control framework where Bayesian optimization directly fine-tunes closed-loop behavior towards a global and long-term objective, while MPC handles lower-level, short-term control tasks. For lithium-ion battery fast charging, we show that the learning approach not only ensures safe operation but also maximizes closed-loop performance. This includes maintaining the battery's operation below its maximum terminal voltage and reducing charging times, all achieved using a standard nominal MPC model with a short horizon and notable initial model-plant mismatch.
Continuous locomotion mode recognition and gait phase estimation based on a shank-mounted IMU with artificial neural networks
Aug 01, 2022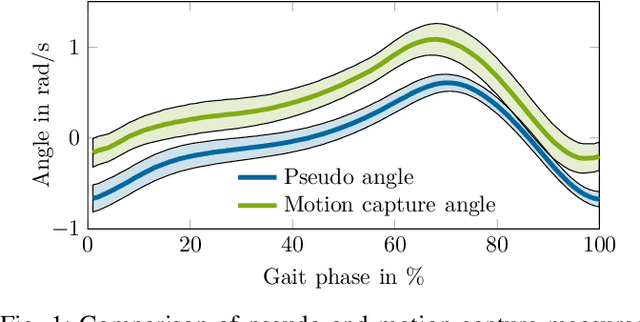
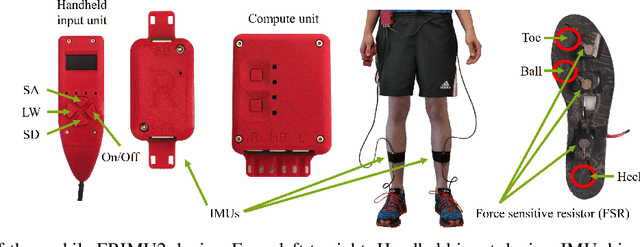
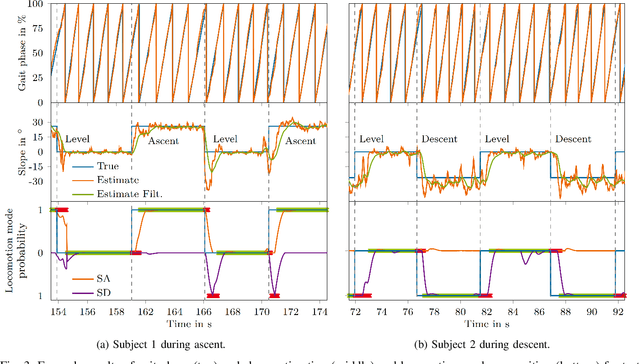
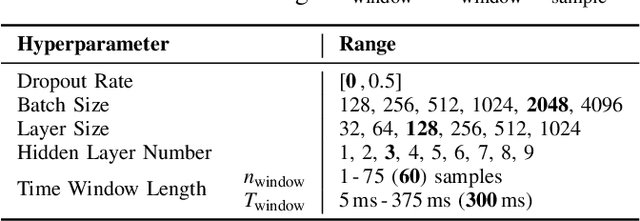
To improve the control of wearable robotics for gait assistance, we present an approach for continuous locomotion mode recognition as well as gait phase and stair slope estimation based on artificial neural networks that include time history information. The input features consist exclusively of processed variables that can be measured with a single shank-mounted inertial measurement unit. We introduce a wearable device to acquire real-world environment test data to demonstrate the performance and the robustness of the approach. Mean absolute error (gait phase, stair slope) and accuracy (locomotion mode) were determined for steady level walking and steady stair ambulation. Robustness was assessed using test data from different sensor hardware, sensor fixations, ambulation environments and subjects. The mean absolute error from the steady gait test data for the gait phase was 2.0-3.5 % for gait phase estimation and 3.3-3.8{\deg} for stair slope estimation. The accuracy of classifying the correct locomotion mode on the test data with the utilization of time history information was in between 98.51 % and 99.67 %. Results show high performance and robustness for continuously predicting gait phase, stair slope and locomotion mode during steady gait. As hypothesized, time history information improves the locomotion mode recognition. However, while the gait phase estimation performed well for untrained transitions between locomotion modes, our qualitative analysis revealed that it may be beneficial to include transition data into the training of the neural network to improve the prediction of the slope and the locomotion mode. Our results suggest that artificial neural networks could be used for high level control of wearable lower limb robotics.