 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Model Predictive Control Parameters via Bayesian Optimization for Battery Fast Charging
Paper and Code
Apr 09, 2024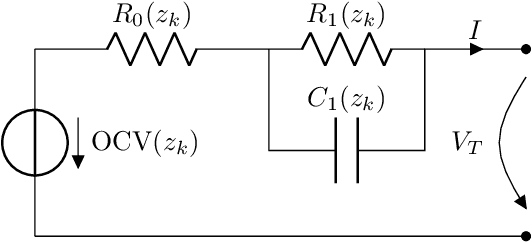
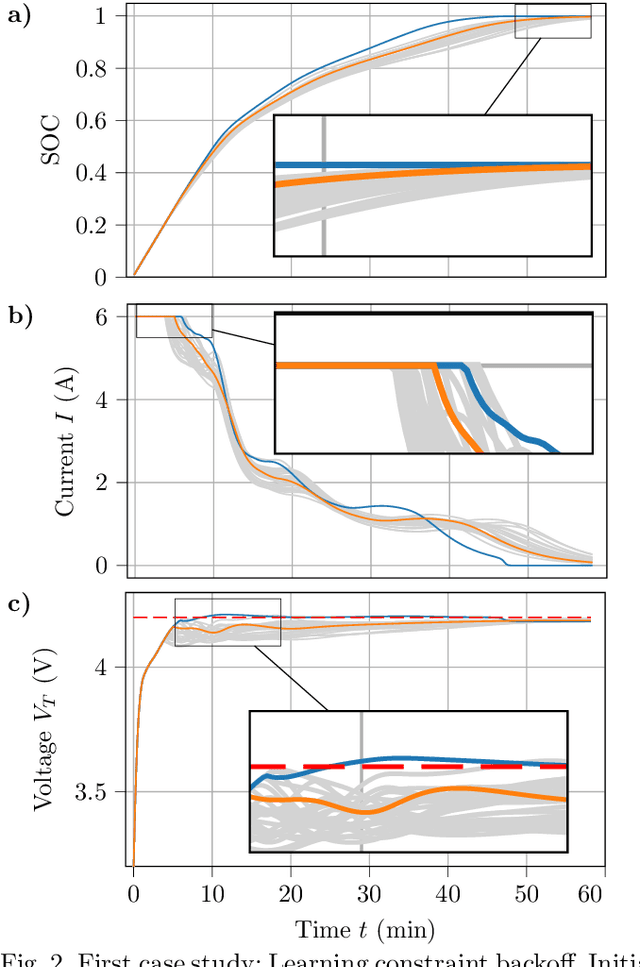
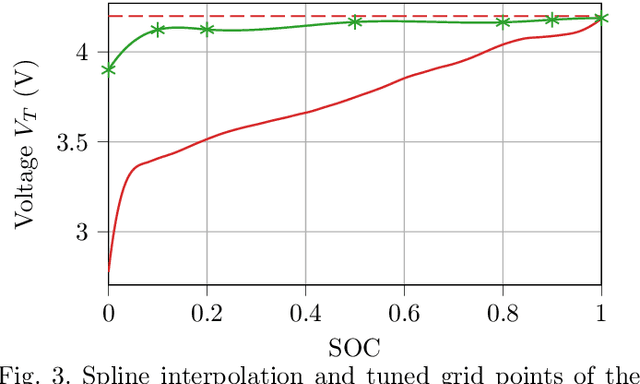
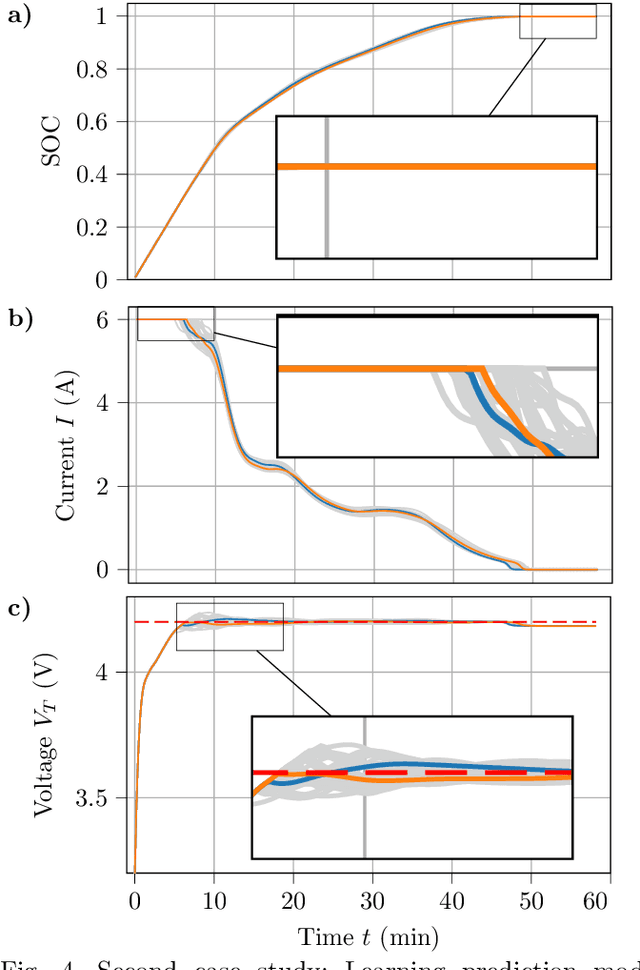
Tuning parameters in model predictive control (MPC) presents significant challenges, particularly when there is a notable discrepancy between the controller's predictions and the actual behavior of the closed-loop plant. This mismatch may stem from factors like substantial model-plant differences, limited prediction horizons that do not cover the entire time of interest, or unforeseen system disturbances. Such mismatches can jeopardize both performance and safety, including constraint satisfaction. Traditional methods address this issue by modifying the finite horizon cost function to better reflect the overall operational cost, learning parts of the prediction model from data, or implementing robust MPC strategies, which might be either computationally intensive or overly cautious. As an alternative, directly optimizing or learning the controller parameters to enhance closed-loop performance has been proposed. We apply Bayesian optimization for efficient learning of unknown model parameters and parameterized constraint backoff terms, aiming to improve closed-loop performance of battery fast charging. This approach establishes a hierarchical control framework where Bayesian optimization directly fine-tunes closed-loop behavior towards a global and long-term objective, while MPC handles lower-level, short-term control tasks. For lithium-ion battery fast charging, we show that the learning approach not only ensures safe operation but also maximizes closed-loop performance. This includes maintaining the battery's operation below its maximum terminal voltage and reducing charging times, all achieved using a standard nominal MPC model with a short horizon and notable initial model-plant mismatch.