 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVDB-EDT: An Efficient Euclidean Distance Transform Algorithm Based on VDB Data Structure
May 10, 2021
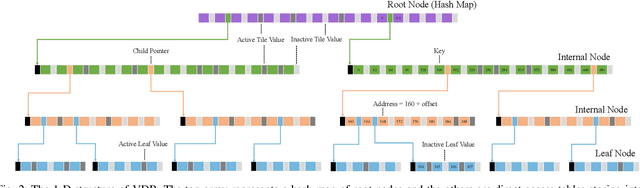


This paper presents a fundamental algorithm, called VDB-EDT, for Euclidean distance transform (EDT) based on the VDB data structure. The algorithm executes on grid maps and generates the corresponding distance field for recording distance information against obstacles, which forms the basis of numerous motion planning algorithms. The contributions of this work mainly lie in three folds. Firstly, we propose a novel algorithm that can facilitate distance transform procedures by optimizing the scheduling priorities of transform functions, which significantly improves the running speed of conventional EDT algorithms. Secondly, we for the first time introduce the memory-efficient VDB data structure, a customed B+ tree, to represent the distance field hierarchically. Benefiting from the special index and caching mechanism, VDB shows a fast (average \textit{O}(1)) random access speed, and thus is very suitable for the frequent neighbor-searching operations in EDT. Moreover, regarding the small scale of existing datasets, we release a large-scale dataset captured from subterranean environments to benchmark EDT algorithms. Extensive experiments on the released dataset and publicly available datasets show that VDB-EDT can reduce memory consumption by about 30%-85%, depending on the sparsity of the environment, while maintaining a competitive running speed with the fastest array-based implementation. The experiments also show that VDB-EDT can significantly outperform the state-of-the-art EDT algorithm in both runtime and memory efficiency, which strongly demonstrates the advantages of our proposed method. The released dataset and source code are available on https://github.com/zhudelong/VDB-EDT.
Visual Servoing Approach for Autonomous UAV Landing on a Moving Vehicle
Apr 02, 2021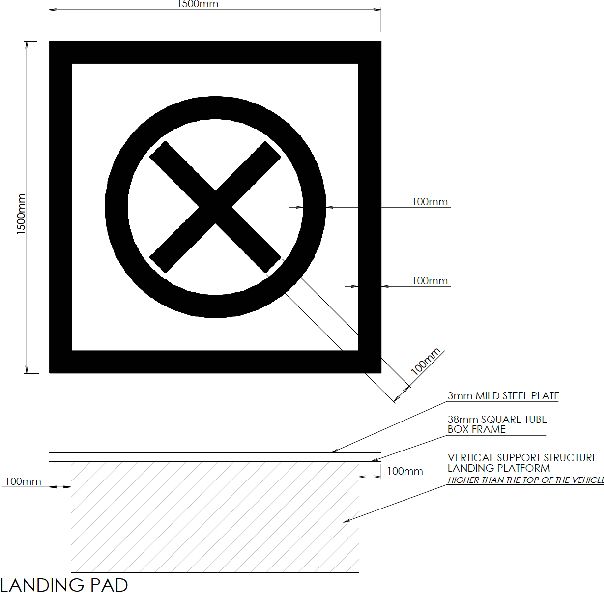
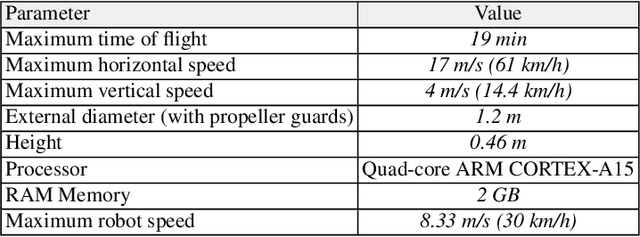
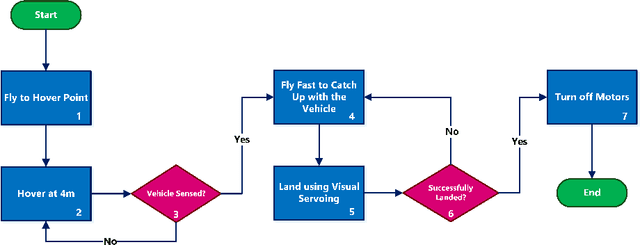
We present a method to autonomously land an Unmanned Aerial Vehicle on a moving vehicle with a circular (or elliptical) pattern on the top. A visual servoing controller approaches the ground vehicle using velocity commands calculated directly in image space. The control laws generate velocity commands in all three dimensions, eliminating the need for a separate height controller. The method has shown the ability to approach and land on the moving deck in simulation, indoor and outdoor environments, and compared to the other available methods, it has provided the fastest landing approach. It does not rely on additional external setup, such as RTK, motion capture system, ground station, offboard processing, or communication with the vehicle, and it requires only a minimal set of hardware and localization sensors. The videos and source codes can be accessed from http://theairlab.org/landing-on-vehicle.
Monocular and Stereo Cues for Landing Zone Evaluation for Micro UAVs
Dec 09, 2018
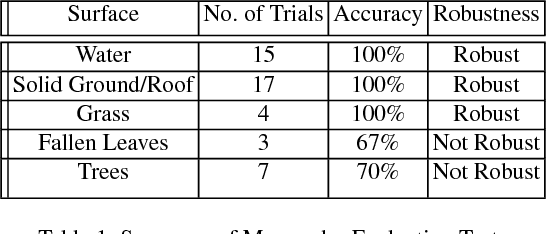
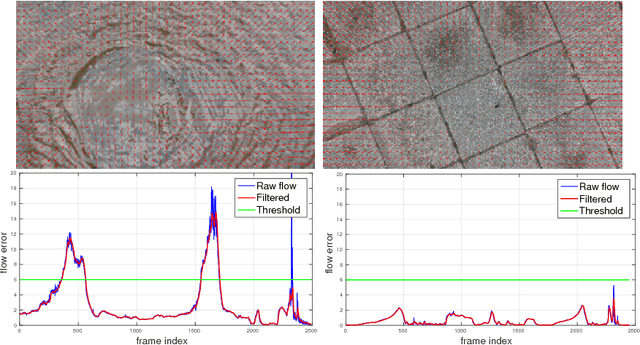
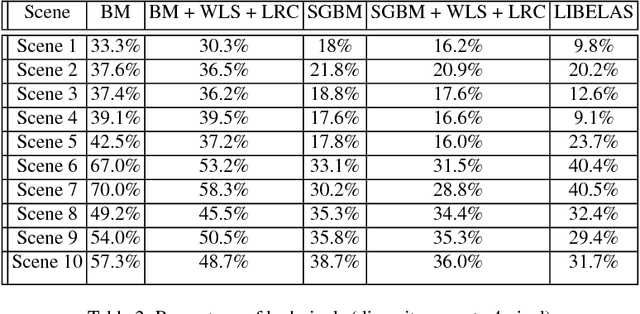
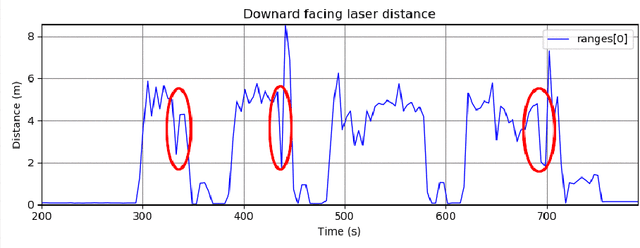
Autonomous and safe landing is important for unmanned aerial vehicles. We present a monocular and stereo image based method for fast and accurate landing zone evaluation for UAVs in various scenarios. Many existing methods rely on Lidar or depth sensor to provide accurate and dense surface reconstruction. We utilize stereo images to evaluate the slope and monocular images to compute homography error. By combining them together, our approach works for both rigid and non-rigid dynamic surfaces. Experiments on many outdoor scenes such as water, grass and roofs, demonstrate the robustness and effectiveness of our approach.