 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVDB-EDT: An Efficient Euclidean Distance Transform Algorithm Based on VDB Data Structure
Paper and Code

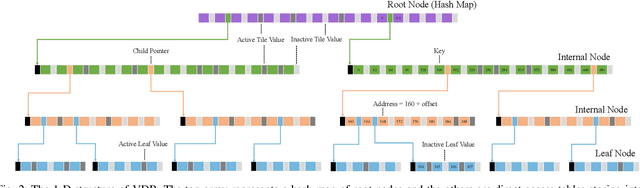


This paper presents a fundamental algorithm, called VDB-EDT, for Euclidean distance transform (EDT) based on the VDB data structure. The algorithm executes on grid maps and generates the corresponding distance field for recording distance information against obstacles, which forms the basis of numerous motion planning algorithms. The contributions of this work mainly lie in three folds. Firstly, we propose a novel algorithm that can facilitate distance transform procedures by optimizing the scheduling priorities of transform functions, which significantly improves the running speed of conventional EDT algorithms. Secondly, we for the first time introduce the memory-efficient VDB data structure, a customed B+ tree, to represent the distance field hierarchically. Benefiting from the special index and caching mechanism, VDB shows a fast (average \textit{O}(1)) random access speed, and thus is very suitable for the frequent neighbor-searching operations in EDT. Moreover, regarding the small scale of existing datasets, we release a large-scale dataset captured from subterranean environments to benchmark EDT algorithms. Extensive experiments on the released dataset and publicly available datasets show that VDB-EDT can reduce memory consumption by about 30%-85%, depending on the sparsity of the environment, while maintaining a competitive running speed with the fastest array-based implementation. The experiments also show that VDB-EDT can significantly outperform the state-of-the-art EDT algorithm in both runtime and memory efficiency, which strongly demonstrates the advantages of our proposed method. The released dataset and source code are available on https://github.com/zhudelong/VDB-EDT.