 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Pixel Image Classification using an Ultrafast Digital Light Projector
Mar 12, 2026Pattern recognition and image classification are essential tasks in machine vision. Autonomous vehicles, for example, require being able to collect the complex information contained in a changing environment and classify it in real time. Here, we experimentally demonstrate image classification at multi-kHz frame rates combining the technique of single pixel imaging (SPI) with a low complexity machine learning model. The use of a microLED-on-CMOS digital light projector for SPI enables ultrafast pattern generation for sub-ms image encoding. We investigate the classification accuracy of our experimental system against the broadly accepted benchmarking task of the MNIST digits classification. We compare the classification performance of two machine learning models: An extreme learning machine (ELM) and a backpropagation trained deep neural network. The complexity of both models is kept low so the overhead added to the inference time is comparable to the image generation time. Crucially, our single pixel image classification approach is based on a spatiotemporal transformation of the information, entirely bypassing the need for image reconstruction. By exploring the performance of our SPI based ELM as binary classifier we demonstrate its potential for efficient anomaly detection in ultrafast imaging scenarios.
Resolution Limit of Single-Photon LiDAR
Mar 31, 2024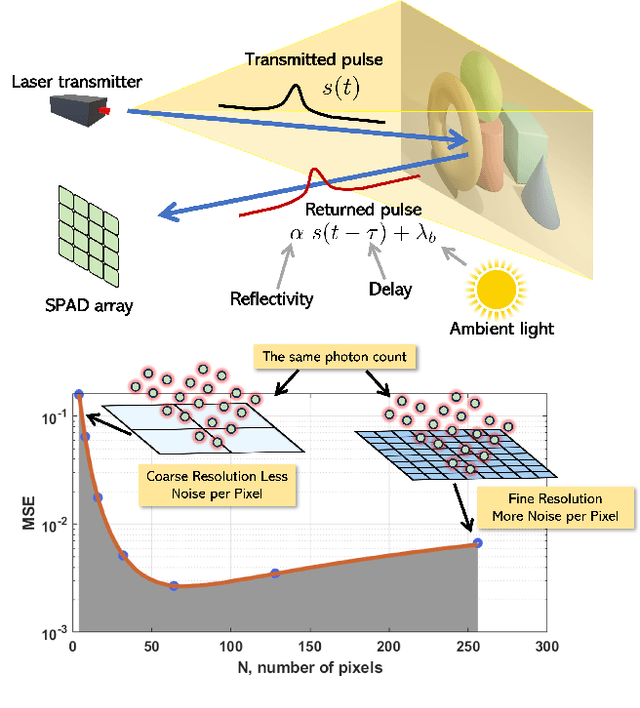

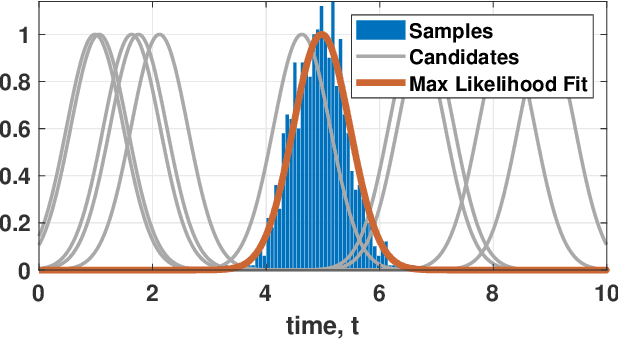
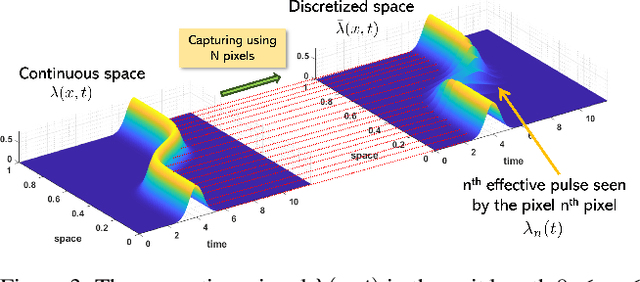
Single-photon Light Detection and Ranging (LiDAR) systems are often equipped with an array of detectors for improved spatial resolution and sensing speed. However, given a fixed amount of flux produced by the laser transmitter across the scene, the per-pixel Signal-to-Noise Ratio (SNR) will decrease when more pixels are packed in a unit space. This presents a fundamental trade-off between the spatial resolution of the sensor array and the SNR received at each pixel. Theoretical characterization of this fundamental limit is explored. By deriving the photon arrival statistics and introducing a series of new approximation techniques, the Mean Squared Error (MSE) of the maximum-likelihood estimator of the time delay is derived. The theoretical predictions align well with simulations and real data.
Single-Photon Counting Receivers for 6G Optical Wireless Communications
May 16, 2023



Optical wireless communication (OWC) offers several complementary advantages to radio-frequency (RF) wireless networks such as its massive available spectrum; hence, it is widely anticipated that OWC will assume a pivotal role in the forthcoming sixth generation (6G) wireless communication networks. Although significant progress has been achieved in OWC over the past decades, the outage induced by occasionally low received optical power continues to pose a key limiting factor for its deployment. In this work, we discuss the potential role of single-photon counting (SPC) receivers as a promising solution to overcome this limitation. We provide an overview of the state-of-the-art of OWC systems utilizing SPC receivers and identify several critical areas of open problems that warrant further research in the future.
Video super-resolution for single-photon LIDAR
Oct 19, 2022
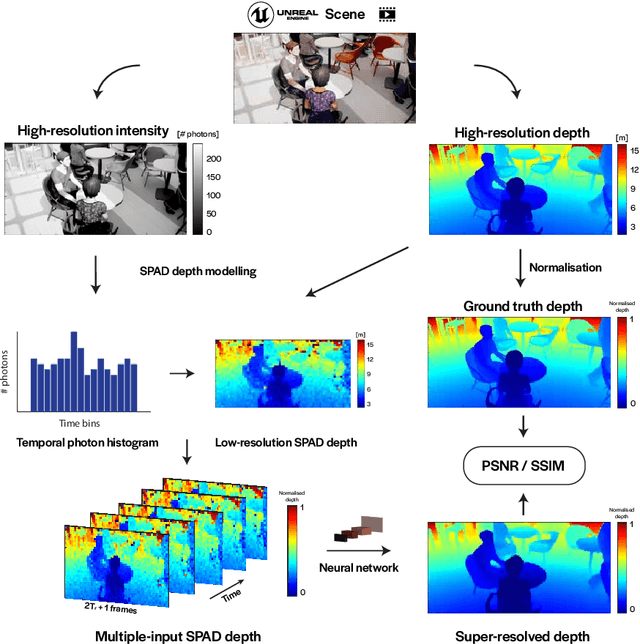
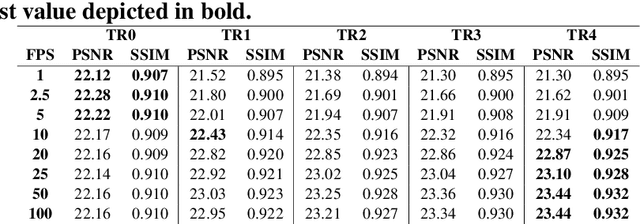
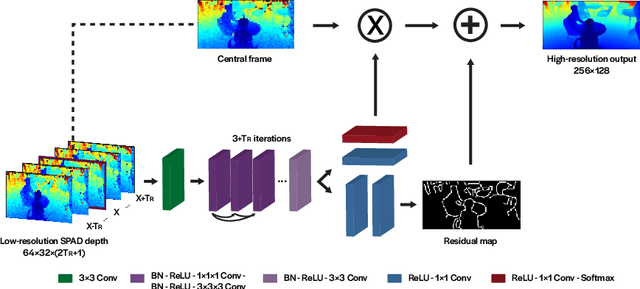
3D Time-of-Flight (ToF) image sensors are used widely in applications such as self-driving cars, Augmented Reality (AR) and robotics. When implemented with Single-Photon Avalanche Diodes (SPADs), compact, array format sensors can be made that offer accurate depth maps over long distances, without the need for mechanical scanning. However, array sizes tend to be small, leading to low lateral resolution, which combined with low Signal-to-Noise Ratio (SNR) levels under high ambient illumination, may lead to difficulties in scene interpretation. In this paper, we use synthetic depth sequences to train a 3D Convolutional Neural Network (CNN) for denoising and upscaling (x4) depth data. Experimental results, based on synthetic as well as real ToF data, are used to demonstrate the effectiveness of the scheme. With GPU acceleration, frames are processed at >30 frames per second, making the approach suitable for low-latency imaging, as required for obstacle avoidance.
A direct time-of-flight image sensor with in-pixel surface detection and dynamic vision
Sep 23, 2022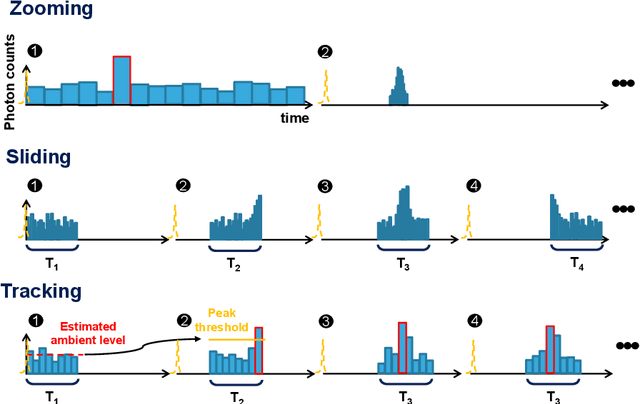
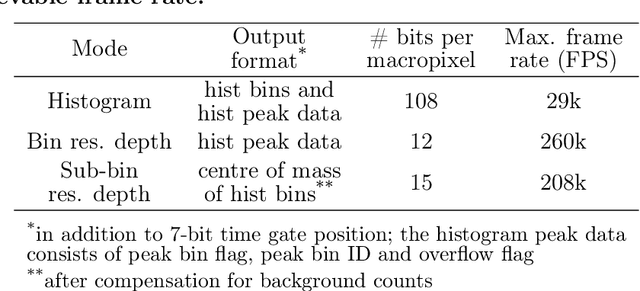
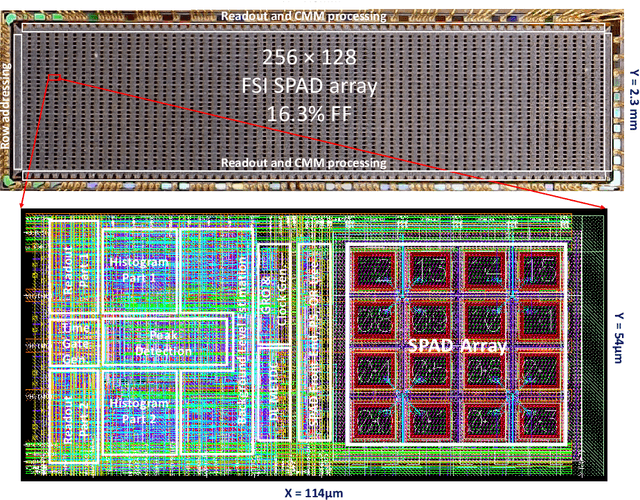
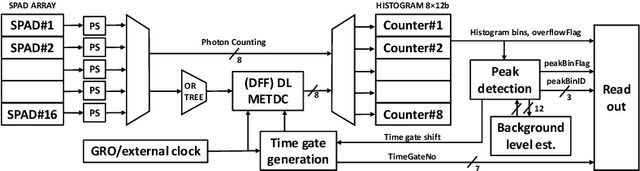
3D flash LIDAR is an alternative to the traditional scanning LIDAR systems, promising precise depth imaging in a compact form factor, and free of moving parts, for applications such as self-driving cars, robotics and augmented reality (AR). Typically implemented using single-photon, direct time-of-flight (dToF) receivers in image sensor format, the operation of the devices can be hindered by the large number of photon events needing to be processed and compressed in outdoor scenarios, limiting frame rates and scalability to larger arrays. We here present a 64x32 pixel (256x128 SPAD) dToF imager that overcomes these limitations by using pixels with embedded histogramming, which lock onto and track the return signal. This reduces the size of output data frames considerably, enabling maximum frame rates in the 10 kFPS range or 100 kFPS for direct depth readings. The sensor offers selective readout of pixels detecting surfaces, or those sensing motion, leading to reduced power consumption and off-chip processing requirements. We demonstrate the application of the sensor in mid-range LIDAR.
Robust super-resolution depth imaging via a multi-feature fusion deep network
Nov 20, 2020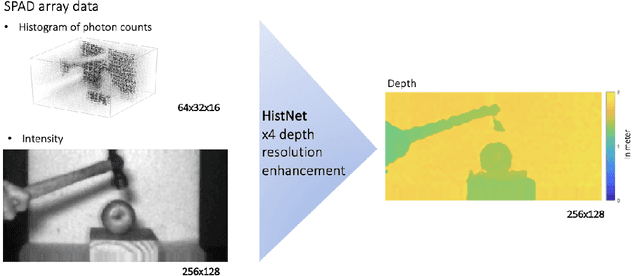
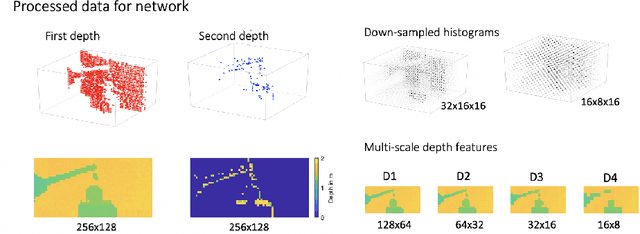
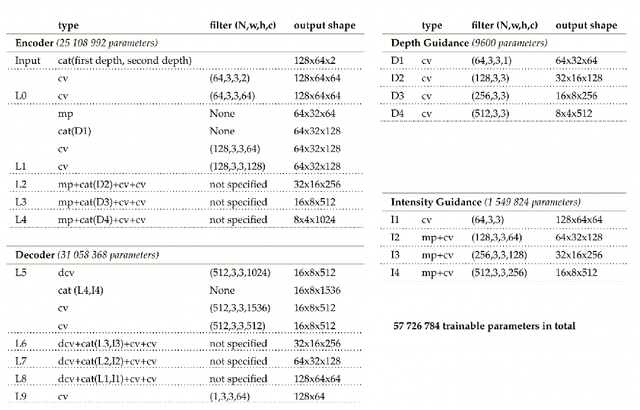
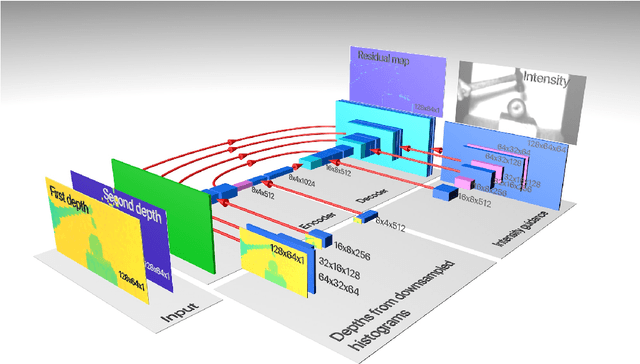
Three-dimensional imaging plays an important role in imaging applications where it is necessary to record depth. The number of applications that use depth imaging is increasing rapidly, and examples include self-driving autonomous vehicles and auto-focus assist on smartphone cameras. Light detection and ranging (LIDAR) via single-photon sensitive detector (SPAD) arrays is an emerging technology that enables the acquisition of depth images at high frame rates. However, the spatial resolution of this technology is typically low in comparison to the intensity images recorded by conventional cameras. To increase the native resolution of depth images from a SPAD camera, we develop a deep network built specifically to take advantage of the multiple features that can be extracted from a camera's histogram data. The network is designed for a SPAD camera operating in a dual-mode such that it captures alternate low resolution depth and high resolution intensity images at high frame rates, thus the system does not require any additional sensor to provide intensity images. The network then uses the intensity images and multiple features extracted from downsampled histograms to guide the upsampling of the depth. Our network provides significant image resolution enhancement and image denoising across a wide range of signal-to-noise ratios and photon levels. We apply the network to a range of 3D data, demonstrating denoising and a four-fold resolution enhancement of depth.