 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPAD-Based Optical Wireless Communication with ACO-OFDM
Oct 25, 2022



The sensitivity of the optical wireless communication (OWC) can be effectively improved by employing the highly sensitive single-photon avalanche diode (SPAD) arrays. However, the nonlinear distortion introduced by the dead time strongly limits the throughput of the SPAD-based OWC systems. Optical orthogonal frequency division multiplexing (OFDM) can be employed in the systems with SPAD arrays to improve the spectral efficiency. In this work, a theoretical performance analysis of SPAD-based OWC system with asymmetrically-clipped optical OFDM (ACO-OFDM) is presented. The impact of the SPAD nonlinearity on the system performance is investigated. In addition, the comparison of the considered scheme with direct-current-biased optical OFDM (DCO-OFDM) is presented showing the distinct reliable operation regimes of the two schemes. In the low power regimes, ACO-OFDM outperforms DCO-OFDM; whereas, the latter is more preferable in the high power regimes.
Performance Analysis of SPAD-Based Optical Wireless Communication with OFDM
Jun 04, 2022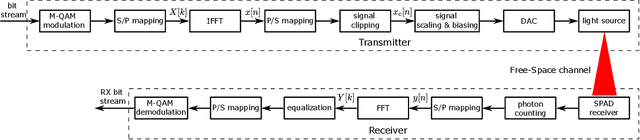



In recent years, there has been a growing interest in the use of single-photon avalanche diode (SPAD) in optical wireless communication (OWC). SPAD operates in the Geiger mode and can act as a photon counting receiver obviating the need for a transimpedance amplifier (TIA). Although a SPAD receiver can provide higher sensitivity compared to the traditional linear photodetectors, it suffers from the dead-time-induced nonlinearity. To improve the data rates of SPAD-based OWC systems, optical orthogonal frequency division multiplexing (OFDM) can be employed. This paper provides a comprehensive theoretical analysis of the SPAD-based OWC systems using OFDM signalling considering the effects of signal clipping, SPAD nonlinearity, and signal-dependent shot noise. An equivalent additive Gaussian noise channel model is proposed to describe the performance of the SPAD-based OFDM system. The statistics of the proposed channel model and the analytical expressions of the signal-to-noise ratio (SNR) and bit error rate (BER) are derived in closed forms. By means of extensive numerical results, the impact of the unique receiver nonlinearity on the system performance is investigated. The results demonstrate new insights into different optical power regimes of reliable operation for SPAD-based OFDM systems even well beyond SPAD saturation level.
High-speed object detection with a single-photon time-of-flight image sensor
Jul 28, 2021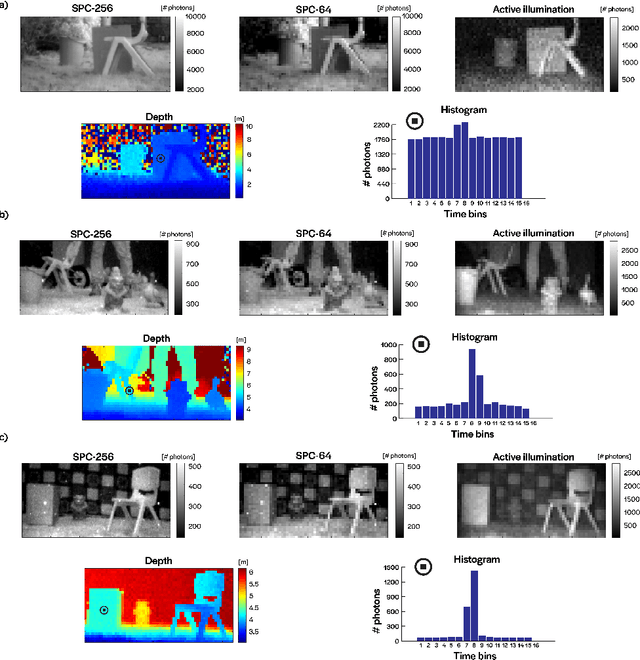
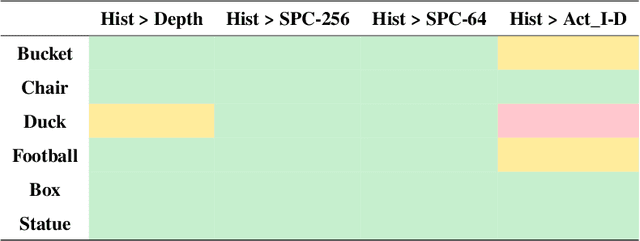
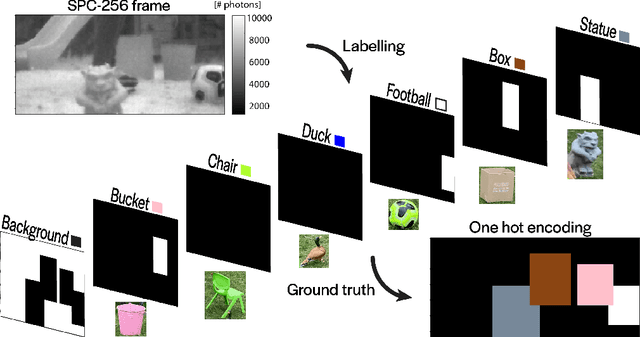

3D time-of-flight (ToF) imaging is used in a variety of applications such as augmented reality (AR), computer interfaces, robotics and autonomous systems. Single-photon avalanche diodes (SPADs) are one of the enabling technologies providing accurate depth data even over long ranges. By developing SPADs in array format with integrated processing combined with pulsed, flood-type illumination, high-speed 3D capture is possible. However, array sizes tend to be relatively small, limiting the lateral resolution of the resulting depth maps, and, consequently, the information that can be extracted from the image for applications such as object detection. In this paper, we demonstrate that these limitations can be overcome through the use of convolutional neural networks (CNNs) for high-performance object detection. We present outdoor results from a portable SPAD camera system that outputs 16-bin photon timing histograms with 64x32 spatial resolution. The results, obtained with exposure times down to 2 ms (equivalent to 500 FPS) and in signal-to-background (SBR) ratios as low as 0.05, point to the advantages of providing the CNN with full histogram data rather than point clouds alone. Alternatively, a combination of point cloud and active intensity data may be used as input, for a similar level of performance. In either case, the GPU-accelerated processing time is less than 1 ms per frame, leading to an overall latency (image acquisition plus processing) in the millisecond range, making the results relevant for safety-critical computer vision applications which would benefit from faster than human reaction times.
Neural network identification of people hidden from view with a single-pixel, single-photon detector
Sep 21, 2017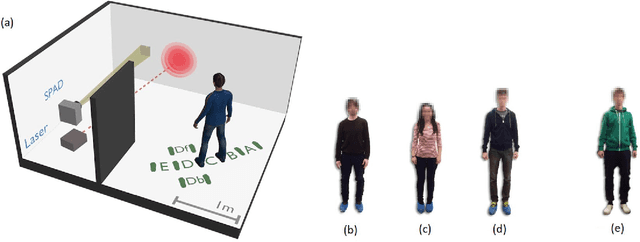
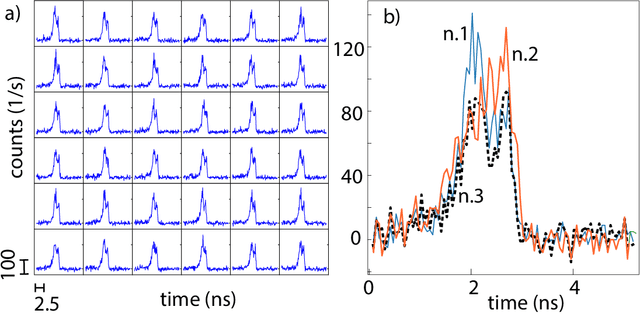
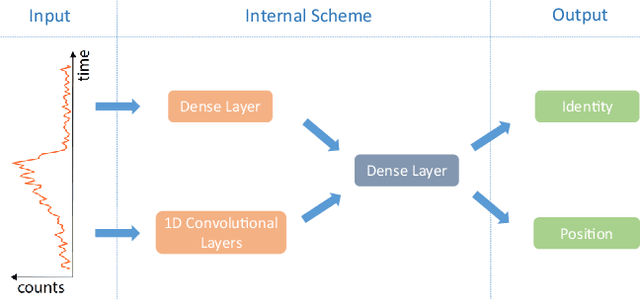
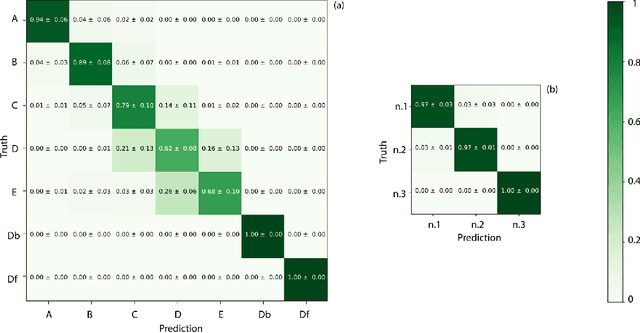
Light scattered from multiple surfaces can be used to retrieve information of hidden environments. However, full three-dimensional retrieval of an object hidden from view by a wall has only been achieved with scanning systems and requires intensive computational processing of the retrieved data. Here we use a non-scanning, single-photon single-pixel detector in combination with an artificial neural network: this allows us to locate the position and to also simultaneously provide the actual identity of a hidden person, chosen from a database of people (N=3). Artificial neural networks applied to specific computational imaging problems can therefore enable novel imaging capabilities with hugely simplified hardware and processing times