 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-speed object detection with a single-photon time-of-flight image sensor
Jul 28, 2021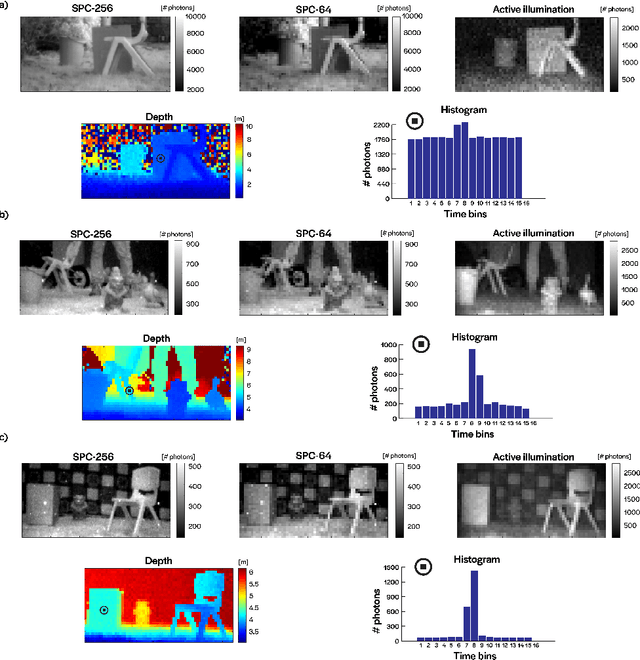
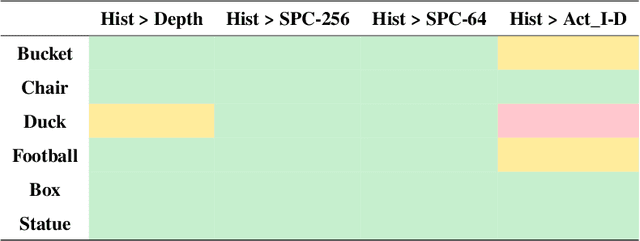
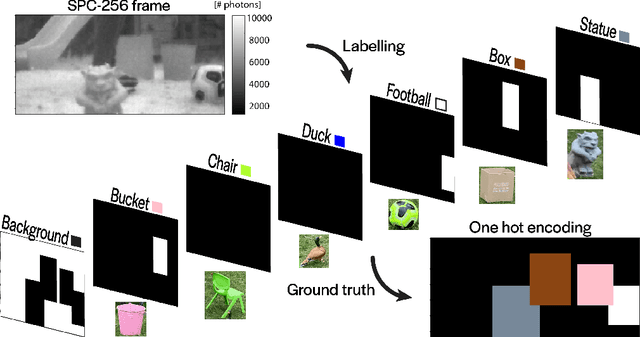

3D time-of-flight (ToF) imaging is used in a variety of applications such as augmented reality (AR), computer interfaces, robotics and autonomous systems. Single-photon avalanche diodes (SPADs) are one of the enabling technologies providing accurate depth data even over long ranges. By developing SPADs in array format with integrated processing combined with pulsed, flood-type illumination, high-speed 3D capture is possible. However, array sizes tend to be relatively small, limiting the lateral resolution of the resulting depth maps, and, consequently, the information that can be extracted from the image for applications such as object detection. In this paper, we demonstrate that these limitations can be overcome through the use of convolutional neural networks (CNNs) for high-performance object detection. We present outdoor results from a portable SPAD camera system that outputs 16-bin photon timing histograms with 64x32 spatial resolution. The results, obtained with exposure times down to 2 ms (equivalent to 500 FPS) and in signal-to-background (SBR) ratios as low as 0.05, point to the advantages of providing the CNN with full histogram data rather than point clouds alone. Alternatively, a combination of point cloud and active intensity data may be used as input, for a similar level of performance. In either case, the GPU-accelerated processing time is less than 1 ms per frame, leading to an overall latency (image acquisition plus processing) in the millisecond range, making the results relevant for safety-critical computer vision applications which would benefit from faster than human reaction times.
Spatial images from temporal data
Dec 02, 2019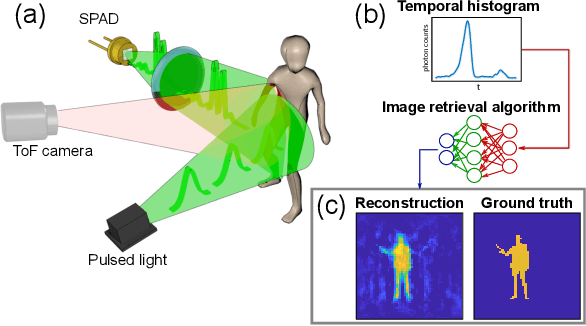
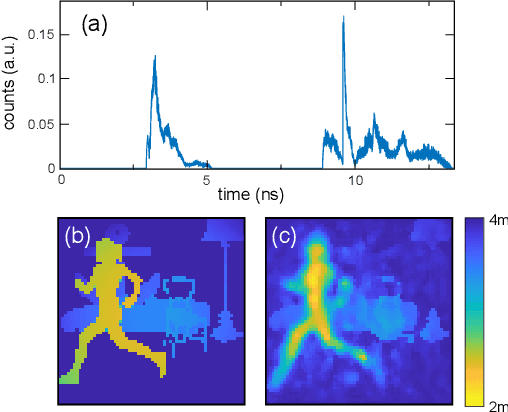
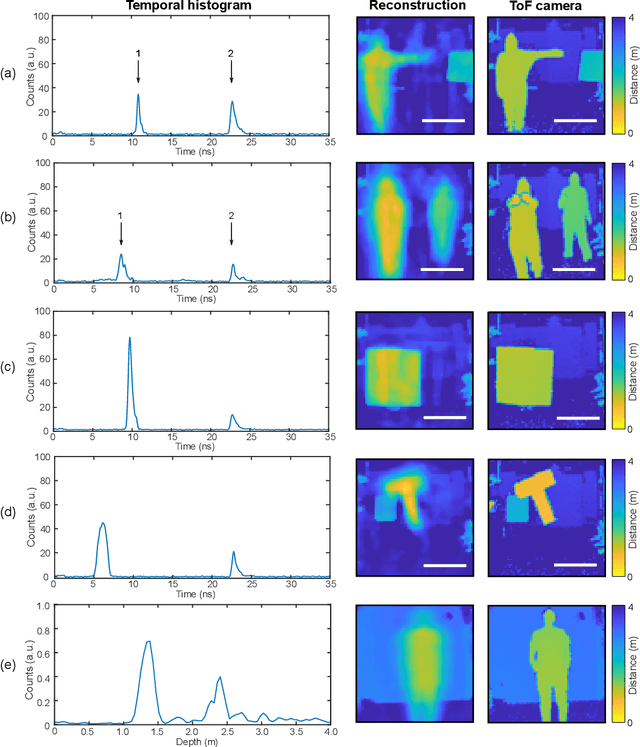
Traditional paradigms for imaging rely on the use of spatial structure either in the detector (pixels arrays) or in the illumination (patterned light). Removal of spatial structure in the detector or illumination, i.e. imaging with just a single-point sensor, would require solving a very strongly ill-posed inverse retrieval problem that to date has not been solved. Here we demonstrate a data-driven approach in which full 3D information is obtained with just a single-point, single-photon avalanche diode that records the arrival time of photons reflected from a scene that is illuminated with short pulses of light. Imaging with single-point time-of-flight (temporal) data opens new routes in terms of speed, size, and functionality. As an example, we show how the training based on an optical time-of-flight camera enables a compact radio-frequency impulse RADAR transceiver to provide 3D images.