 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Enabled sensor fusion of time of flight imaging and mmwave for concealed metal detection
Aug 01, 2024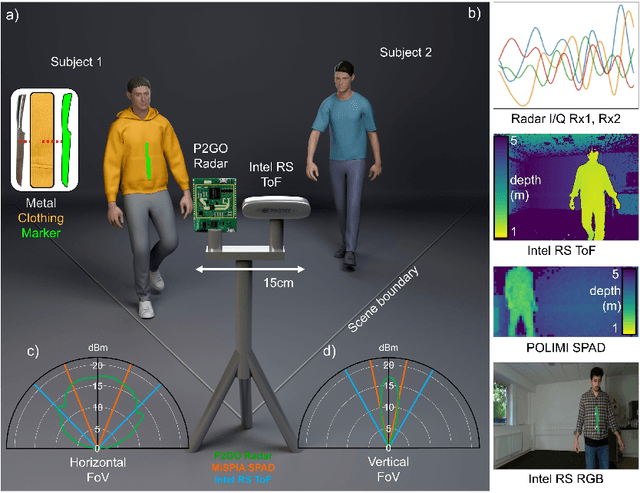
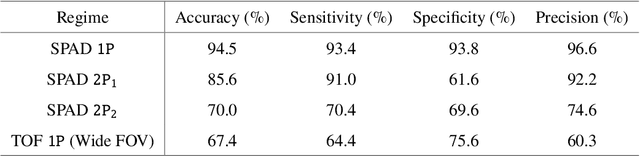
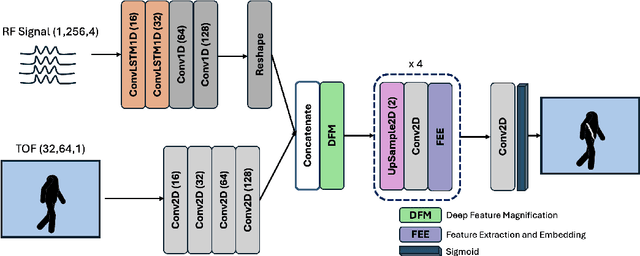
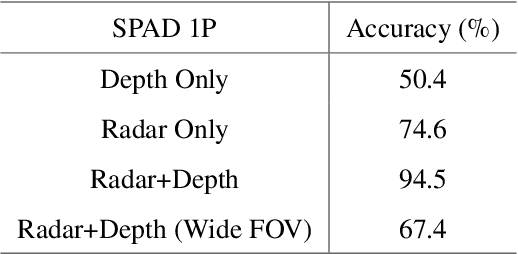
In the field of detection and ranging, multiple complementary sensing modalities may be used to enrich the information obtained from a dynamic scene. One application of this sensor fusion is in public security and surveillance, whose efficacy and privacy protection measures must be continually evaluated. We present a novel deployment of sensor fusion for the discrete detection of concealed metal objects on persons whilst preserving their privacy. This is achieved by coupling off-the-shelf mmWave radar and depth camera technology with a novel neural network architecture that processes the radar signals using convolutional Long Short-term Memory (LSTM) blocks and the depth signal, using convolutional operations. The combined latent features are then magnified using a deep feature magnification to learn cross-modality dependencies in the data. We further propose a decoder, based on the feature extraction and embedding block, to learn an efficient upsampling of the latent space to learn the location of the concealed object in the spatial domain through radar feature guidance. We demonstrate the detection of presence and inference of 3D location of concealed metal objects with an accuracy of up to 95%, using a technique that is robust to multiple persons. This work provides a demonstration of the potential for cost effective and portable sensor fusion, with strong opportunities for further development.
Non-Line-of-Sight Tracking and Mapping with an Active Corner Camera
Aug 02, 2022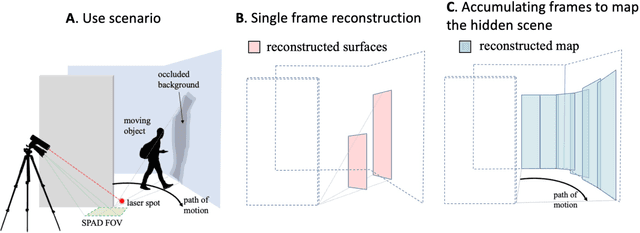
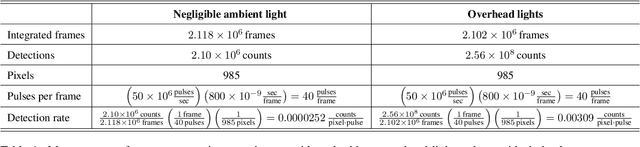
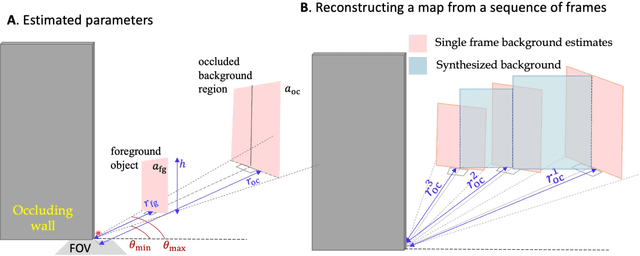
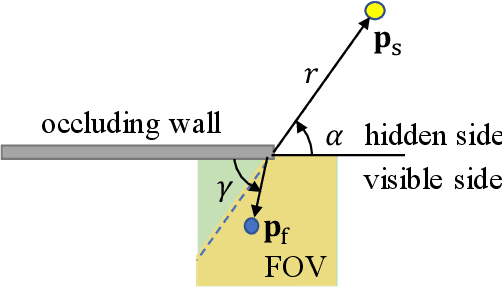
The ability to form non-line-of-sight (NLOS) images of changing scenes could be transformative in a variety of fields, including search and rescue, autonomous vehicle navigation, and reconnaissance. Most existing active NLOS methods illuminate the hidden scene using a pulsed laser directed at a relay surface and collect time-resolved measurements of returning light. The prevailing approaches include raster scanning of a rectangular grid on a vertical wall opposite the volume of interest to generate a collection of confocal measurements. These are inherently limited by the need for laser scanning. Methods that avoid laser scanning track the moving parts of the hidden scene as one or two point targets. In this work, based on more complete optical response modeling yet still without multiple illumination positions, we demonstrate accurate reconstructions of objects in motion and a 'map' of the stationary scenery behind them. The ability to count, localize, and characterize the sizes of hidden objects in motion, combined with mapping of the stationary hidden scene, could greatly improve indoor situational awareness in a variety of applications.
Spatial images from temporal data
Dec 02, 2019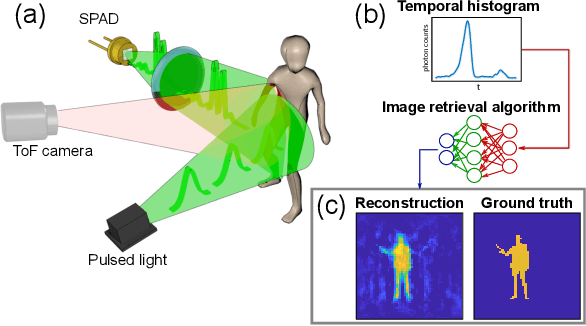
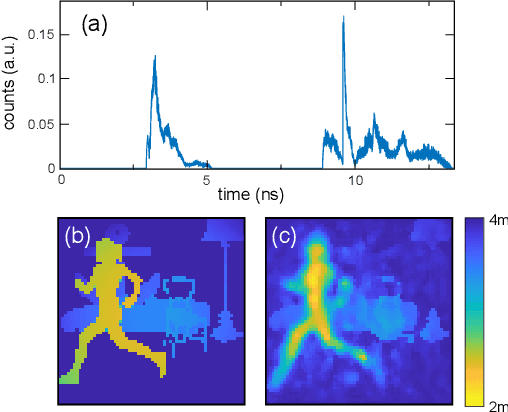
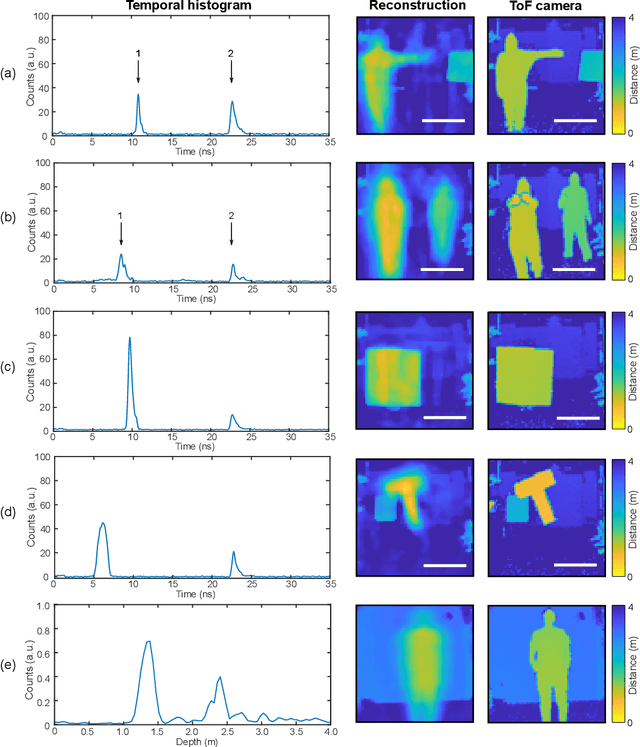
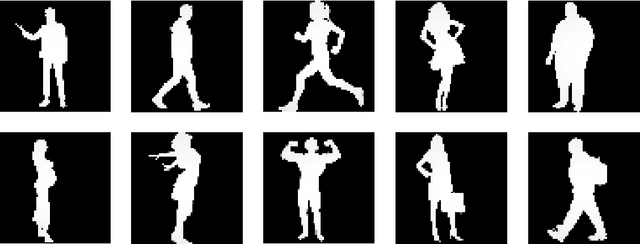
Traditional paradigms for imaging rely on the use of spatial structure either in the detector (pixels arrays) or in the illumination (patterned light). Removal of spatial structure in the detector or illumination, i.e. imaging with just a single-point sensor, would require solving a very strongly ill-posed inverse retrieval problem that to date has not been solved. Here we demonstrate a data-driven approach in which full 3D information is obtained with just a single-point, single-photon avalanche diode that records the arrival time of photons reflected from a scene that is illuminated with short pulses of light. Imaging with single-point time-of-flight (temporal) data opens new routes in terms of speed, size, and functionality. As an example, we show how the training based on an optical time-of-flight camera enables a compact radio-frequency impulse RADAR transceiver to provide 3D images.