 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbsorption-Based, Passive Range Imaging from Hyperspectral Thermal Measurements
Aug 10, 2023Passive hyperspectral long-wave infrared measurements are remarkably informative about the surroundings, such as remote object material composition, temperature, and range; and air temperature and gas concentrations. Remote object material and temperature determine the spectrum of thermal radiance, and range, air temperature, and gas concentrations determine how this spectrum is modified by propagation to the sensor. We computationally separate these phenomena, introducing a novel passive range imaging method based on atmospheric absorption of ambient thermal radiance. Previously demonstrated passive absorption-based ranging methods assume hot and highly emitting objects. However, the temperature variation in natural scenes is usually low, making range imaging challenging. Our method benefits from explicit consideration of air emission and parametric modeling of atmospheric absorption. To mitigate noise in low-contrast scenarios, we jointly estimate range and intrinsic object properties by exploiting a variety of absorption lines spread over the infrared spectrum. Along with Monte Carlo simulations that demonstrate the importance of regularization, temperature differentials, and availability of many spectral bands, we apply this method to long-wave infrared (8--13 $\mu$m) hyperspectral image data acquired from natural scenes with no active illumination. Range features from 15m to 150m are recovered, with good qualitative match to unaligned lidar data.
Non-Line-of-Sight Tracking and Mapping with an Active Corner Camera
Aug 02, 2022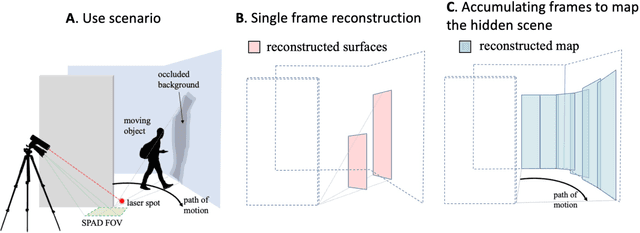
The ability to form non-line-of-sight (NLOS) images of changing scenes could be transformative in a variety of fields, including search and rescue, autonomous vehicle navigation, and reconnaissance. Most existing active NLOS methods illuminate the hidden scene using a pulsed laser directed at a relay surface and collect time-resolved measurements of returning light. The prevailing approaches include raster scanning of a rectangular grid on a vertical wall opposite the volume of interest to generate a collection of confocal measurements. These are inherently limited by the need for laser scanning. Methods that avoid laser scanning track the moving parts of the hidden scene as one or two point targets. In this work, based on more complete optical response modeling yet still without multiple illumination positions, we demonstrate accurate reconstructions of objects in motion and a 'map' of the stationary scenery behind them. The ability to count, localize, and characterize the sizes of hidden objects in motion, combined with mapping of the stationary hidden scene, could greatly improve indoor situational awareness in a variety of applications.