 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePattern representation and recognition with accelerated analog neuromorphic systems
Jul 03, 2017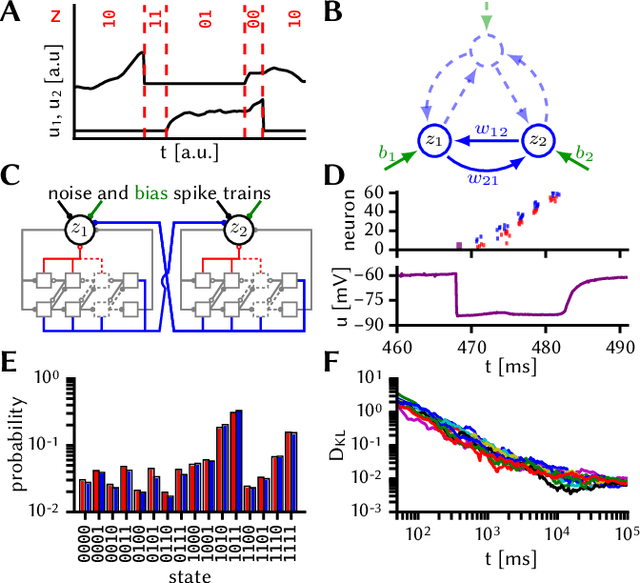

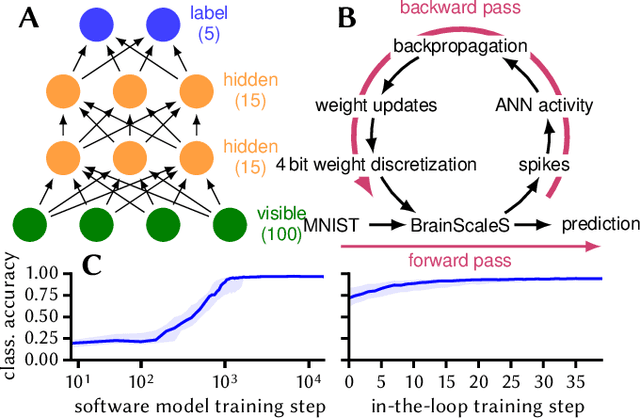
Despite being originally inspired by the central nervous system, artificial neural networks have diverged from their biological archetypes as they have been remodeled to fit particular tasks. In this paper, we review several possibilites to reverse map these architectures to biologically more realistic spiking networks with the aim of emulating them on fast, low-power neuromorphic hardware. Since many of these devices employ analog components, which cannot be perfectly controlled, finding ways to compensate for the resulting effects represents a key challenge. Here, we discuss three different strategies to address this problem: the addition of auxiliary network components for stabilizing activity, the utilization of inherently robust architectures and a training method for hardware-emulated networks that functions without perfect knowledge of the system's dynamics and parameters. For all three scenarios, we corroborate our theoretical considerations with experimental results on accelerated analog neuromorphic platforms.
* accepted at ISCAS 2017
Characterization and Compensation of Network-Level Anomalies in Mixed-Signal Neuromorphic Modeling Platforms
Feb 10, 2015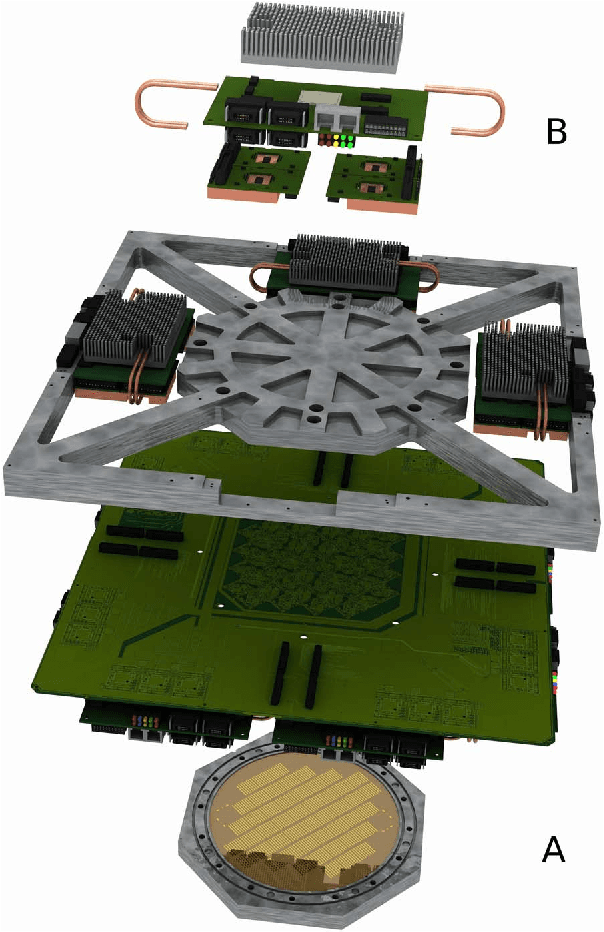
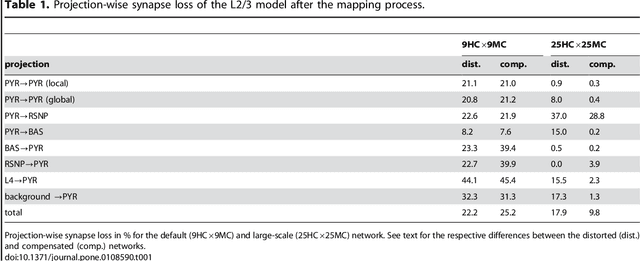
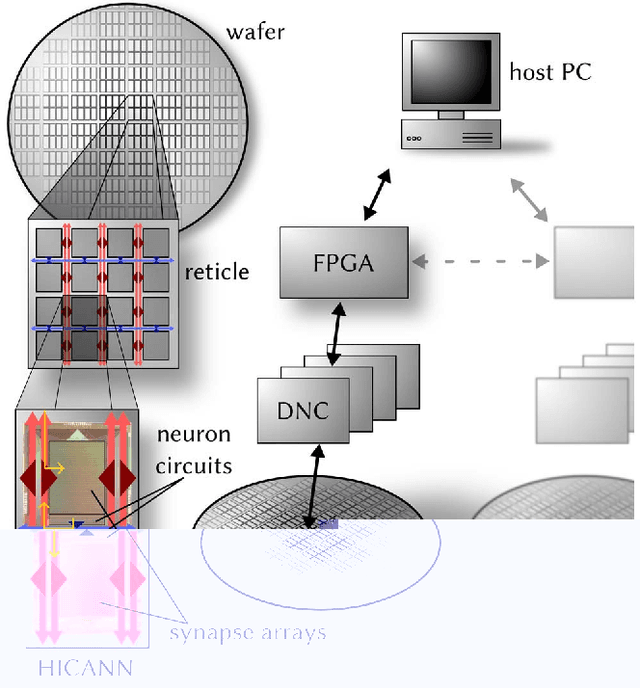
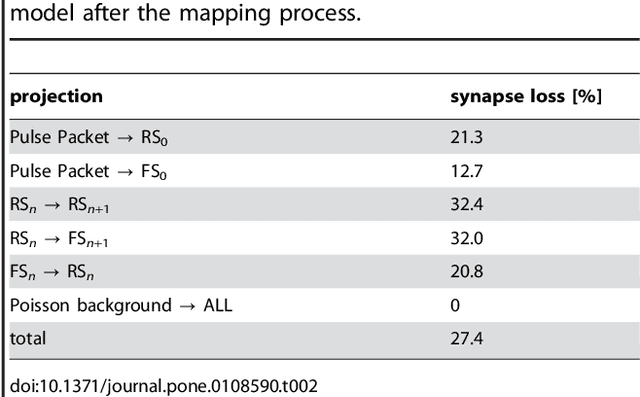
Advancing the size and complexity of neural network models leads to an ever increasing demand for computational resources for their simulation. Neuromorphic devices offer a number of advantages over conventional computing architectures, such as high emulation speed or low power consumption, but this usually comes at the price of reduced configurability and precision. In this article, we investigate the consequences of several such factors that are common to neuromorphic devices, more specifically limited hardware resources, limited parameter configurability and parameter variations. Our final aim is to provide an array of methods for coping with such inevitable distortion mechanisms. As a platform for testing our proposed strategies, we use an executable system specification (ESS) of the BrainScaleS neuromorphic system, which has been designed as a universal emulation back-end for neuroscientific modeling. We address the most essential limitations of this device in detail and study their effects on three prototypical benchmark network models within a well-defined, systematic workflow. For each network model, we start by defining quantifiable functionality measures by which we then assess the effects of typical hardware-specific distortion mechanisms, both in idealized software simulations and on the ESS. For those effects that cause unacceptable deviations from the original network dynamics, we suggest generic compensation mechanisms and demonstrate their effectiveness. Both the suggested workflow and the investigated compensation mechanisms are largely back-end independent and do not require additional hardware configurability beyond the one required to emulate the benchmark networks in the first place. We hereby provide a generic methodological environment for configurable neuromorphic devices that are targeted at emulating large-scale, functional neural networks.