 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpurfies: Sparse Surface Reconstruction using Local Geometry Priors
Aug 29, 2024



We introduce Spurfies, a novel method for sparse-view surface reconstruction that disentangles appearance and geometry information to utilize local geometry priors trained on synthetic data. Recent research heavily focuses on 3D reconstruction using dense multi-view setups, typically requiring hundreds of images. However, these methods often struggle with few-view scenarios. Existing sparse-view reconstruction techniques often rely on multi-view stereo networks that need to learn joint priors for geometry and appearance from a large amount of data. In contrast, we introduce a neural point representation that disentangles geometry and appearance to train a local geometry prior using a subset of the synthetic ShapeNet dataset only. During inference, we utilize this surface prior as additional constraint for surface and appearance reconstruction from sparse input views via differentiable volume rendering, restricting the space of possible solutions. We validate the effectiveness of our method on the DTU dataset and demonstrate that it outperforms previous state of the art by 35% in surface quality while achieving competitive novel view synthesis quality. Moreover, in contrast to previous works, our method can be applied to larger, unbounded scenes, such as Mip-NeRF 360.
Recent Trends in 3D Reconstruction of General Non-Rigid Scenes
Mar 22, 2024Reconstructing models of the real world, including 3D geometry, appearance, and motion of real scenes, is essential for computer graphics and computer vision. It enables the synthesizing of photorealistic novel views, useful for the movie industry and AR/VR applications. It also facilitates the content creation necessary in computer games and AR/VR by avoiding laborious manual design processes. Further, such models are fundamental for intelligent computing systems that need to interpret real-world scenes and actions to act and interact safely with the human world. Notably, the world surrounding us is dynamic, and reconstructing models of dynamic, non-rigidly moving scenes is a severely underconstrained and challenging problem. This state-of-the-art report (STAR) offers the reader a comprehensive summary of state-of-the-art techniques with monocular and multi-view inputs such as data from RGB and RGB-D sensors, among others, conveying an understanding of different approaches, their potential applications, and promising further research directions. The report covers 3D reconstruction of general non-rigid scenes and further addresses the techniques for scene decomposition, editing and controlling, and generalizable and generative modeling. More specifically, we first review the common and fundamental concepts necessary to understand and navigate the field and then discuss the state-of-the-art techniques by reviewing recent approaches that use traditional and machine-learning-based neural representations, including a discussion on the newly enabled applications. The STAR is concluded with a discussion of the remaining limitations and open challenges.
Neural Parametric Gaussians for Monocular Non-Rigid Object Reconstruction
Dec 02, 2023Reconstructing dynamic objects from monocular videos is a severely underconstrained and challenging problem, and recent work has approached it in various directions. However, owing to the ill-posed nature of this problem, there has been no solution that can provide consistent, high-quality novel views from camera positions that are significantly different from the training views. In this work, we introduce Neural Parametric Gaussians (NPGs) to take on this challenge by imposing a two-stage approach: first, we fit a low-rank neural deformation model, which then is used as regularization for non-rigid reconstruction in the second stage. The first stage learns the object's deformations such that it preserves consistency in novel views. The second stage obtains high reconstruction quality by optimizing 3D Gaussians that are driven by the coarse model. To this end, we introduce a local 3D Gaussian representation, where temporally shared Gaussians are anchored in and deformed by local oriented volumes. The resulting combined model can be rendered as radiance fields, resulting in high-quality photo-realistic reconstructions of the non-rigidly deforming objects, maintaining 3D consistency across novel views. We demonstrate that NPGs achieve superior results compared to previous works, especially in challenging scenarios with few multi-view cues.
ManhattanSLAM: Robust Planar Tracking and Mapping Leveraging Mixture of Manhattan Frames
Mar 28, 2021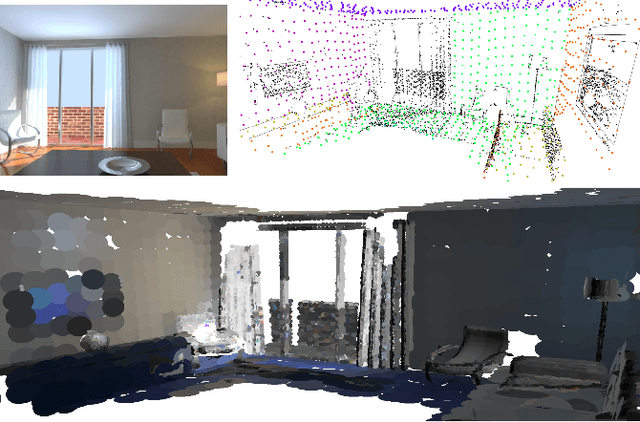
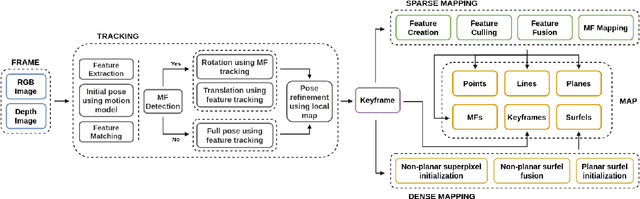
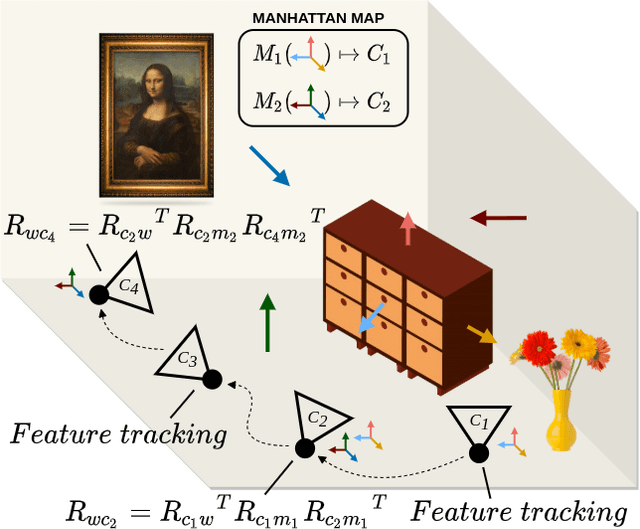
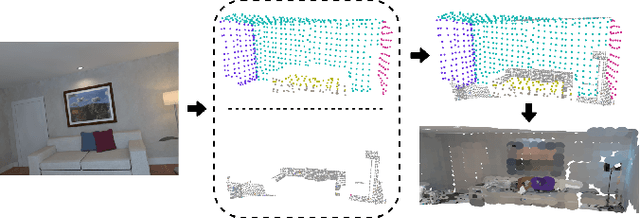
In this paper, a robust RGB-D SLAM system is proposed to utilize the structural information in indoor scenes, allowing for accurate tracking and efficient dense mapping on a CPU. Prior works have used the Manhattan World (MW) assumption to estimate low-drift camera pose, in turn limiting the applications of such systems. This paper, in contrast, proposes a novel approach delivering robust tracking in MW and non-MW environments. We check orthogonal relations between planes to directly detect Manhattan Frames, modeling the scene as a Mixture of Manhattan Frames. For MW scenes, we decouple pose estimation and provide a novel drift-free rotation estimation based on Manhattan Frame observations. For translation estimation in MW scenes and full camera pose estimation in non-MW scenes, we make use of point, line and plane features for robust tracking in challenging scenes. %mapping Additionally, by exploiting plane features detected in each frame, we also propose an efficient surfel-based dense mapping strategy, which divides each image into planar and non-planar regions. Planar surfels are initialized directly from sparse planes in our map while non-planar surfels are built by extracting superpixels. We evaluate our method on public benchmarks for pose estimation, drift and reconstruction accuracy, achieving superior performance compared to other state-of-the-art methods. We will open-source our code in the future.
RGB-D SLAM with Structural Regularities
Oct 15, 2020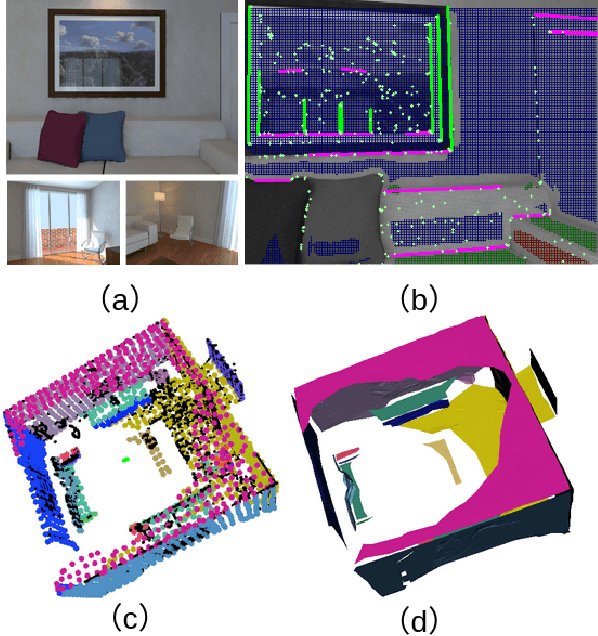
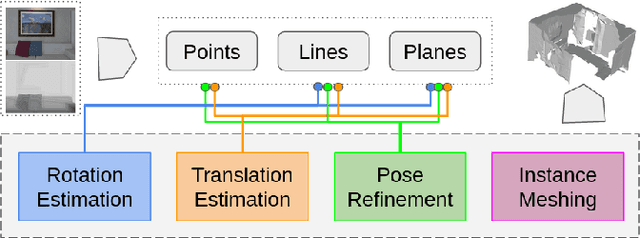
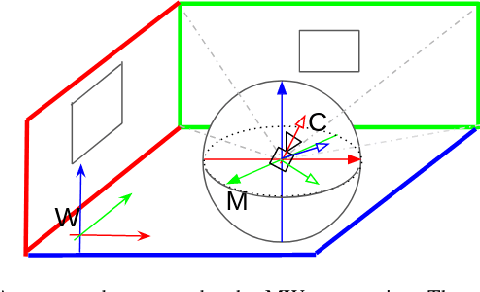
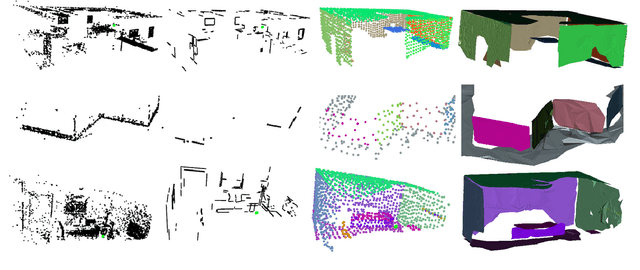
This work proposes a RGB-D SLAM system specifically designed for structured environments and aimed at improved tracking and mapping accuracy by relying on geometric features that are extracted from the surrounding. Structured environments offer, in addition to points, also an abundance of geometrical features such as lines and planes, which we exploit to design both the tracking and mapping components of our SLAM system. For the tracking part, we explore geometric relationships between these features based on the assumption of a Manhattan World (MW). We propose a decoupling-refinement method based on points, lines, and planes, as well as the use of Manhattan relationships in an additional pose refinement module. For the mapping part, different levels of maps from sparse to dense are reconstructed at a low computational cost. We propose an instance-wise meshing strategy to build a dense map by meshing plane instances independently. The overall performance in terms of pose estimation and reconstruction is evaluated on public benchmarks and shows improved performance compared to state-of-the-art methods. We plan to publicly release the code of our SLAM framework.