 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-D SLAM with Structural Regularities
Paper and Code
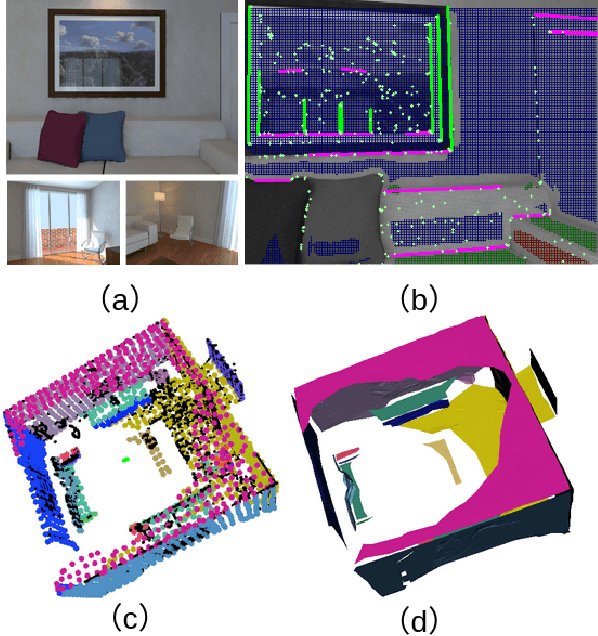
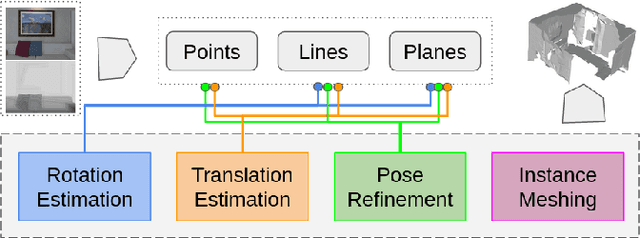
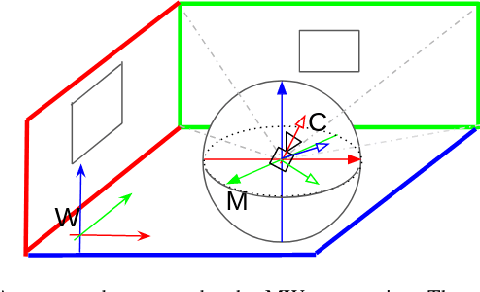
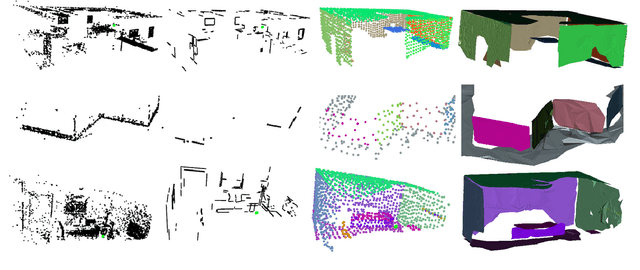
This work proposes a RGB-D SLAM system specifically designed for structured environments and aimed at improved tracking and mapping accuracy by relying on geometric features that are extracted from the surrounding. Structured environments offer, in addition to points, also an abundance of geometrical features such as lines and planes, which we exploit to design both the tracking and mapping components of our SLAM system. For the tracking part, we explore geometric relationships between these features based on the assumption of a Manhattan World (MW). We propose a decoupling-refinement method based on points, lines, and planes, as well as the use of Manhattan relationships in an additional pose refinement module. For the mapping part, different levels of maps from sparse to dense are reconstructed at a low computational cost. We propose an instance-wise meshing strategy to build a dense map by meshing plane instances independently. The overall performance in terms of pose estimation and reconstruction is evaluated on public benchmarks and shows improved performance compared to state-of-the-art methods. We plan to publicly release the code of our SLAM framework.