 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Scalable Primitives for Generalized Sensor Fusion in Autonomous Vehicles
Dec 01, 2021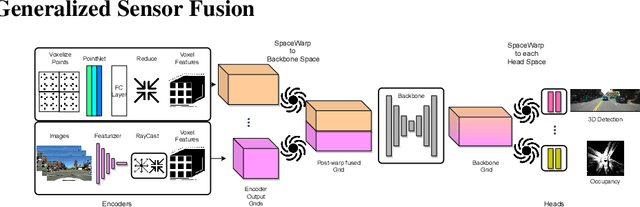
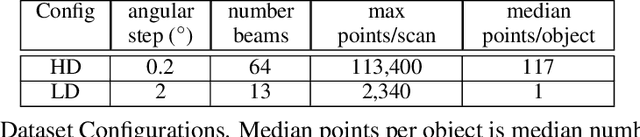
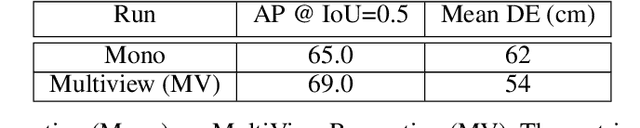
In autonomous driving, there has been an explosion in the use of deep neural networks for perception, prediction and planning tasks. As autonomous vehicles (AVs) move closer to production, multi-modal sensor inputs and heterogeneous vehicle fleets with different sets of sensor platforms are becoming increasingly common in the industry. However, neural network architectures typically target specific sensor platforms and are not robust to changes in input, making the problem of scaling and model deployment particularly difficult. Furthermore, most players still treat the problem of optimizing software and hardware as entirely independent problems. We propose a new end to end architecture, Generalized Sensor Fusion (GSF), which is designed in such a way that both sensor inputs and target tasks are modular and modifiable. This enables AV system designers to easily experiment with different sensor configurations and methods and opens up the ability to deploy on heterogeneous fleets using the same models that are shared across a large engineering organization. Using this system, we report experimental results where we demonstrate near-parity of an expensive high-density (HD) LiDAR sensor with a cheap low-density (LD) LiDAR plus camera setup in the 3D object detection task. This paves the way for the industry to jointly design hardware and software architectures as well as large fleets with heterogeneous configurations.