 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid NeRF-Stereo Vision: Pioneering Depth Estimation and 3D Reconstruction in Endoscopy
Oct 10, 2024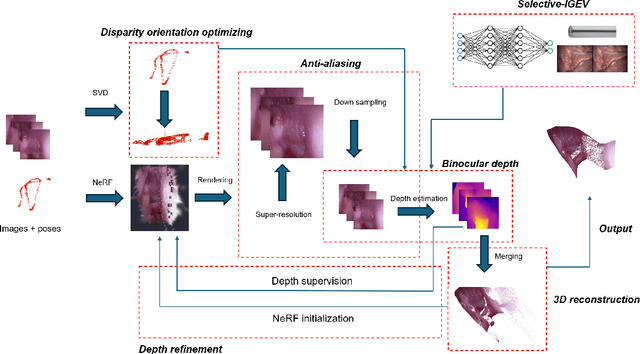
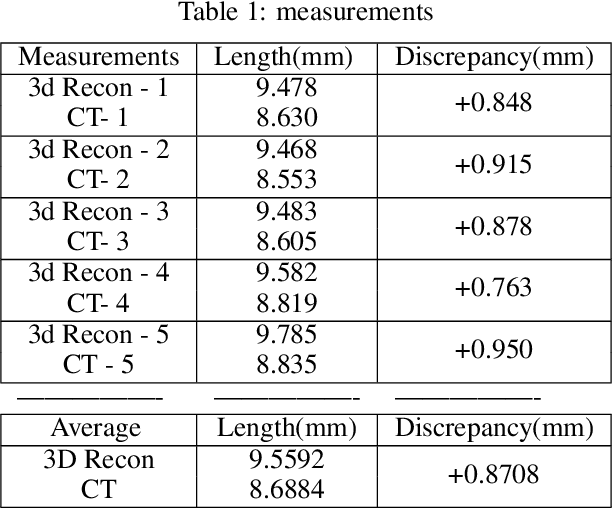
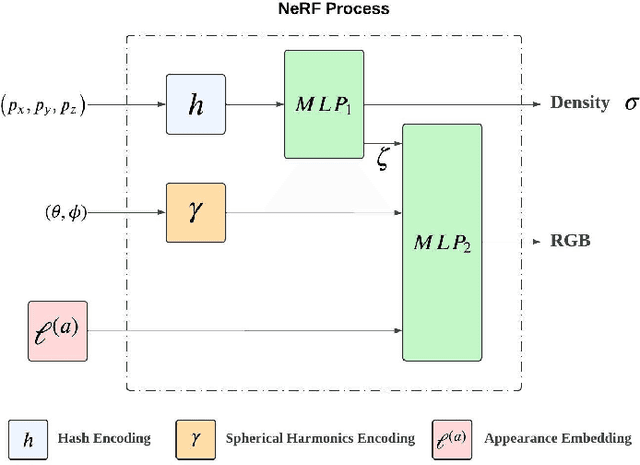
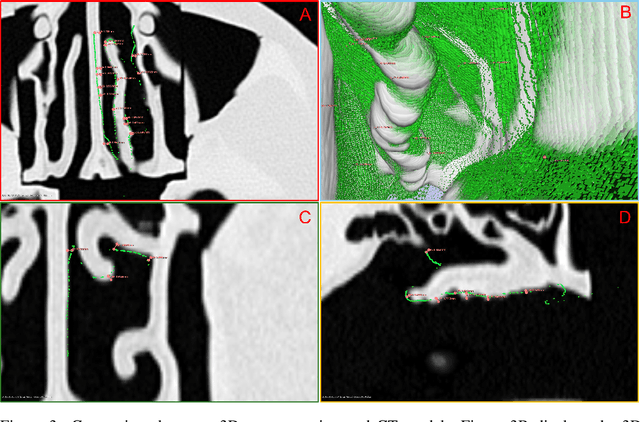
The 3D reconstruction of the surgical field in minimally invasive endoscopic surgery has posed a formidable challenge when using conventional monocular endoscopes. Existing 3D reconstruction methodologies are frequently encumbered by suboptimal accuracy and limited generalization capabilities. In this study, we introduce an innovative pipeline using Neural Radiance Fields (NeRF) for 3D reconstruction. Our approach utilizes a preliminary NeRF reconstruction that yields a coarse model, then creates a binocular scene within the reconstructed environment, which derives an initial depth map via stereo vision. This initial depth map serves as depth supervision for subsequent NeRF iterations, progressively refining the 3D reconstruction with enhanced accuracy. The binocular depth is iteratively recalculated, with the refinement process continuing until the depth map converges, and exhibits negligible variations. Through this recursive process, high-fidelity depth maps are generated from monocular endoscopic video of a realistic cranial phantom. By repeated measures of the final 3D reconstruction compared to X-ray computed tomography, all differences of relevant clinical distances result in sub-millimeter accuracy.
Real-time Virtual Intraoperative CT for Image Guided Surgery
Dec 05, 2021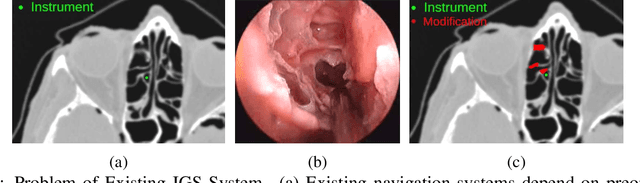
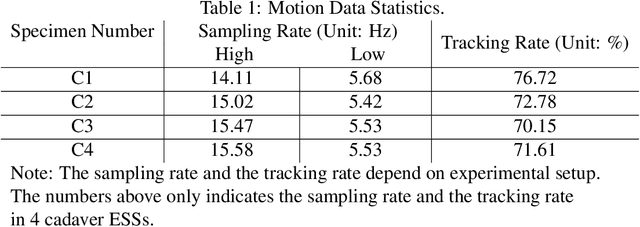
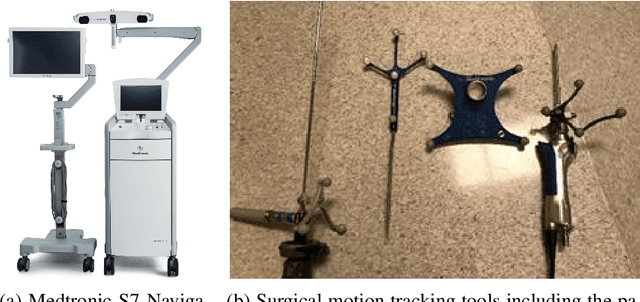
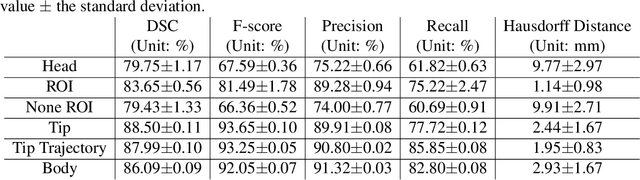
Abstract. Purpose: This paper presents a scheme for generating virtual intraoperative CT scans in order to improve surgical completeness in Endoscopic Sinus Surgeries (ESS). Approach: The work presents three methods, the tip motion-based, the tip trajectory-based, and the instrument based, along with non-parametric smoothing and Gaussian Process Regression, for virtual intraoperative CT generation. Results: The proposed methods studied and compared on ESS performed on cadavers. Surgical results show all three methods improve the Dice Similarity Coefficients > 86%, with F-score > 92% and precision > 89.91%. The tip trajectory-based method was found to have best performance and reached 96.87% precision in surgical completeness evaluation. Conclusions: This work demonstrated that virtual intraoperative CT scans improves the consistency between the actual surgical scene and the reference model, and improves surgical completeness in ESS. Comparing with actual intraoperative CT scans, the proposed scheme has no impact on existing surgical protocols, does not require extra hardware other than the one is already available in most ESS overcome the high costs, the repeated radiation, and the elongated anesthesia caused by actual intraoperative CTs, and is practical in ESS.
Real-time Informative Surgical Skill Assessment with Gaussian Process Learning
Dec 05, 2021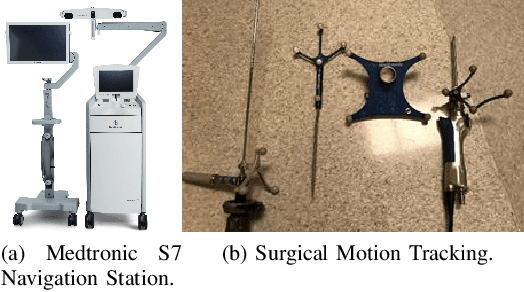
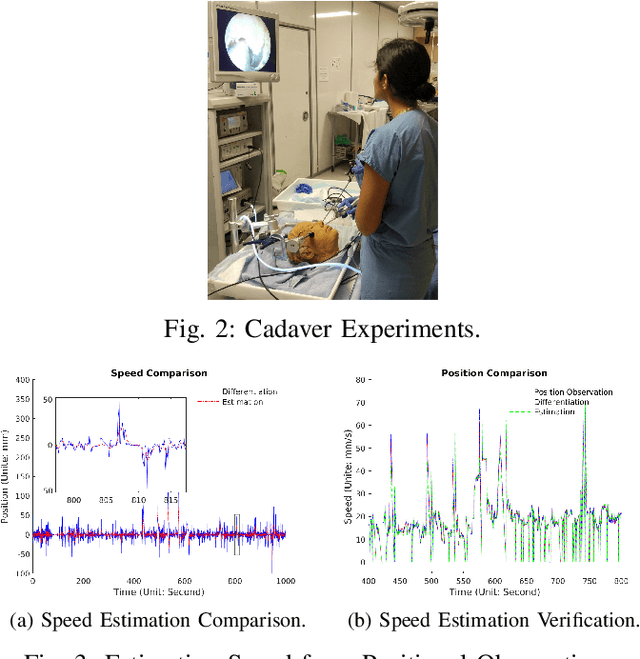
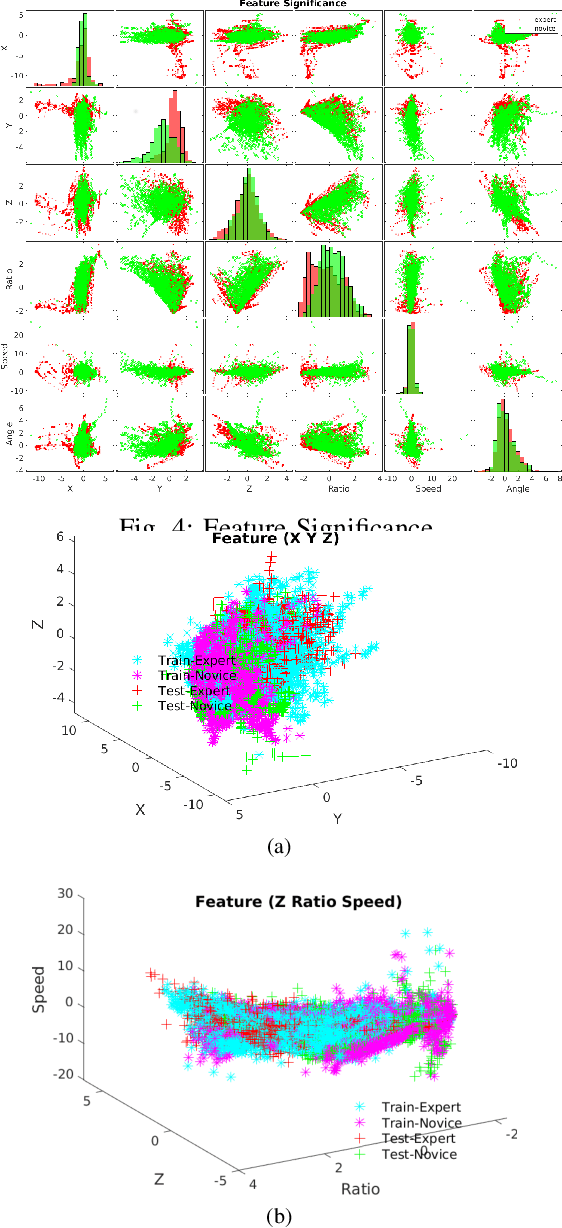
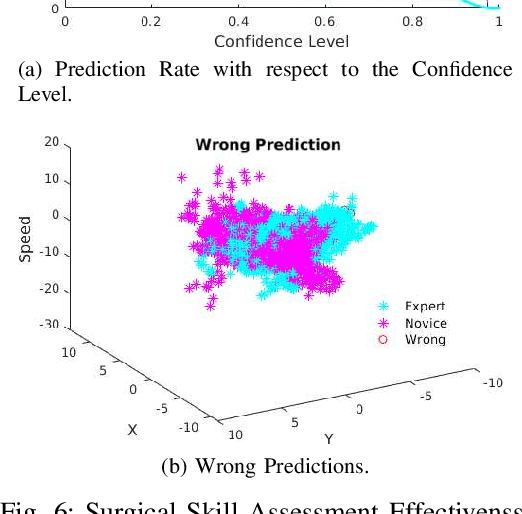
Endoscopic Sinus and Skull Base Surgeries (ESSBSs) is a challenging and potentially dangerous surgical procedure, and objective skill assessment is the key components to improve the effectiveness of surgical training, to re-validate surgeons' skills, and to decrease surgical trauma and the complication rate in operating rooms. Because of the complexity of surgical procedures, the variation of operation styles, and the fast development of new surgical skills, the surgical skill assessment remains a challenging problem. This work presents a novel Gaussian Process Learning-based heuristic automatic objective surgical skill assessment method for ESSBSs. Different with classical surgical skill assessment algorithms, the proposed method 1) utilizes the kinematic features in surgical instrument relative movements, instead of using specific surgical tasks or the statistics to assess skills in real-time; 2) provide informative feedback, instead of a summative scores; 3) has the ability to incrementally learn from new data, instead of depending on a fixed dataset. The proposed method projects the instrument movements into the endoscope coordinate to reduce the data dimensionality. It then extracts the kinematic features of the projected data and learns the relationship between surgical skill levels and the features with the Gaussian Process learning technique. The proposed method was verified in full endoscopic skull base and sinus surgeries on cadavers. These surgeries have different pathology, requires different treatment and has different complexities. The experimental results show that the proposed method reaches 100\% prediction precision for complete surgical procedures and 90\% precision for real-time prediction assessment.
Identifying Pediatric Vascular Anomalies With Deep Learning
Sep 16, 2019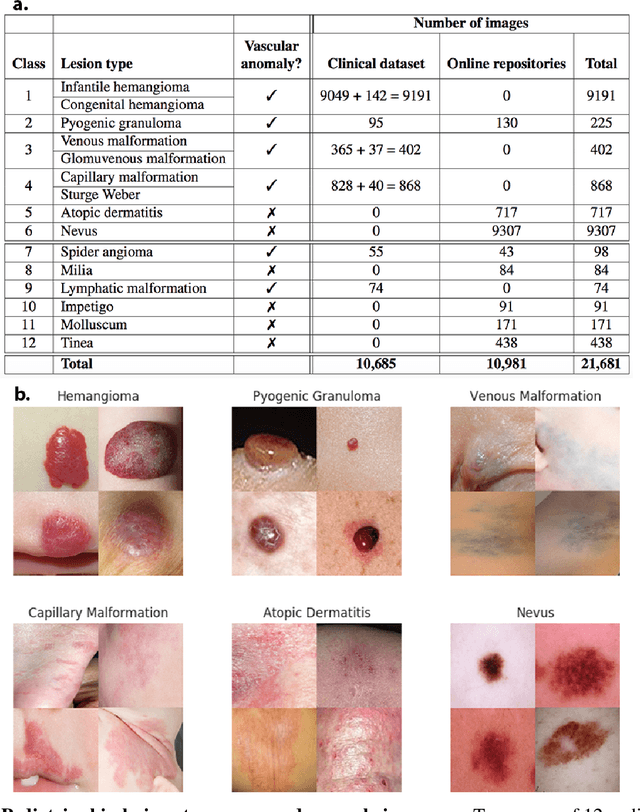
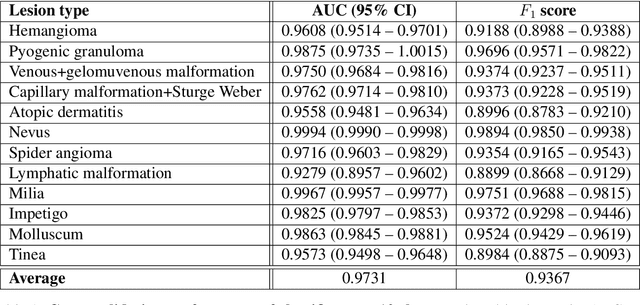
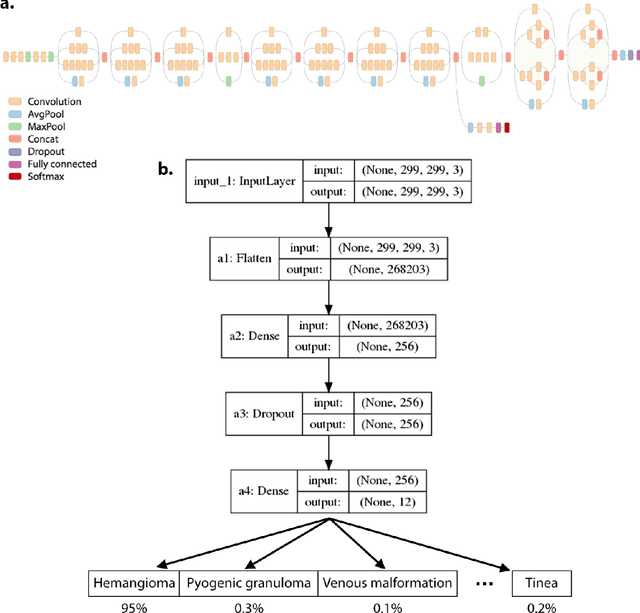

Vascular anomalies, more colloquially known as birthmarks, affect up to 1 in 10 infants. Though many of these lesions self-resolve, some types can result in medical complications or disfigurement without proper diagnosis or management. Accurately diagnosing vascular anomalies is challenging for pediatricians and primary care physicians due to subtle visual differences and similarity to other pediatric dermatologic conditions. This can result in delayed or incorrect referrals for treatment. To address this problem, we developed a convolutional neural network (CNN) to automatically classify images of vascular anomalies and other pediatric skin conditions to aid physicians with diagnosis. We constructed a dataset of 21,681 clinical images, including data collected between 2002-2018 at Seattle Children's hospital as well as five dermatologist-curated online repositories, and built a taxonomy over vascular anomalies and other common pediatric skin lesions. The CNN achieved an average AUC of 0.9731 when ten-fold cross-validation was performed across a taxonomy of 12 classes. The classifier's average AUC and weighted F1 score was 0.9889 and 0.9732 respectively when evaluated on a previously unseen test set of six of these classes. Further, when used as an aid by pediatricians (n = 7), the classifier increased their average visual diagnostic accuracy from 73.10% to 91.67%. The classifier runs in real-time on a smartphone and has the potential to improve diagnosis of these conditions, particularly in resource-limited areas.
Behavior Trees as a Representation for Medical Procedures
Aug 27, 2018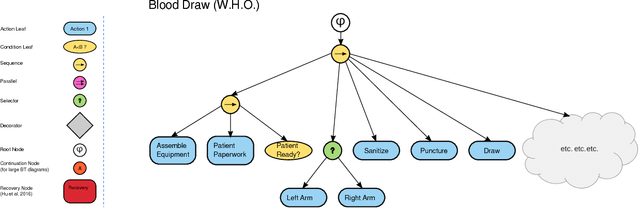
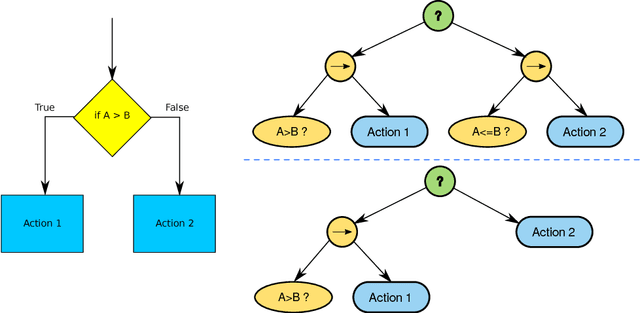
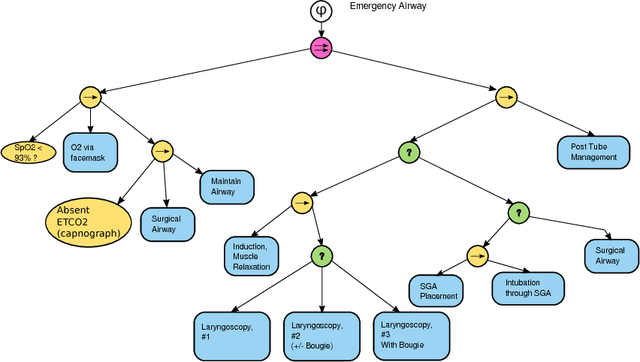
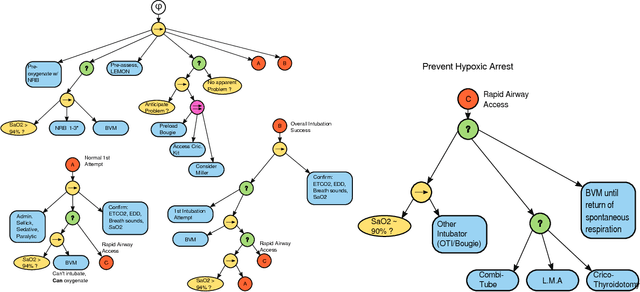
Objective: Effective collaboration between machines and clinicians requires flexible data structures to represent medical processes and clinical practice guidelines. Such a data structure could enable effective turn-taking between human and automated components of a complex treatment, accurate on-line monitoring of clinical treatments (for example to detect medical errors), or automated treatment systems (such as future medical robots) whose overall treatment plan is understandable and auditable by human experts. Materials and Methods: Behavior trees (BTs) emerged from video game development as a graphical language for modeling intelligent agent behavior. BTs have several properties which are attractive for modeling medical procedures including human-readability, authoring tools, and composability. Results: This paper will illustrate construction of BTs for exemplary medical procedures and clinical protocols. Discussion and Conclusion: Behavior Trees thus form a useful, and human authorable/readable bridge between clinical practice guidelines and AI systems.