 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Informative Surgical Skill Assessment with Gaussian Process Learning
Dec 05, 2021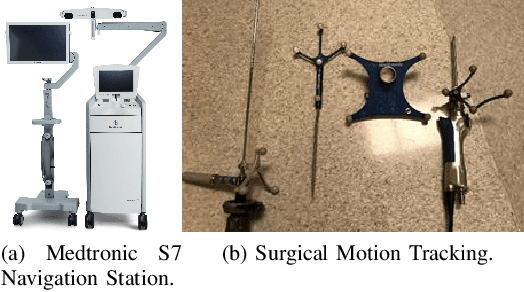
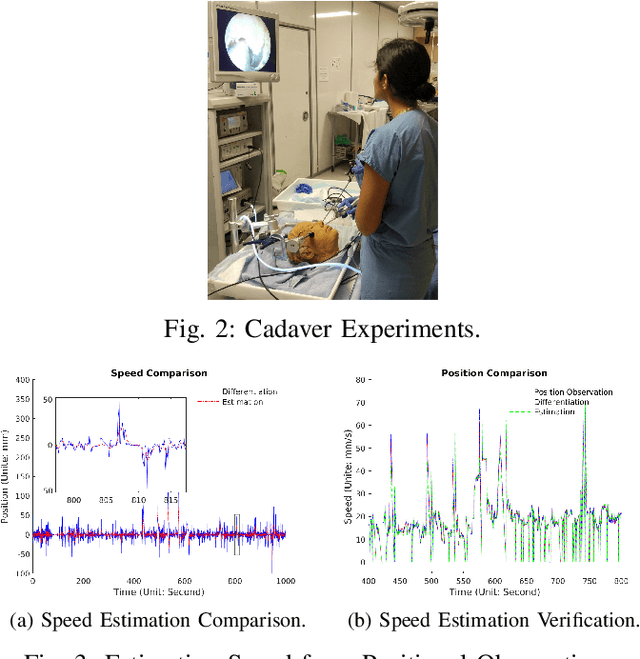
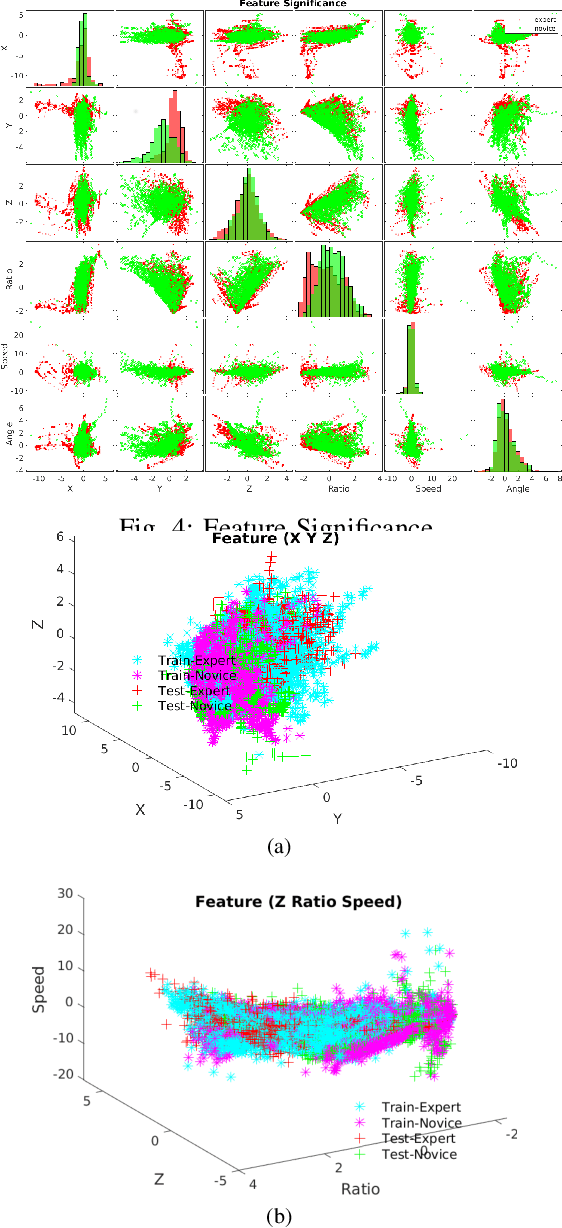
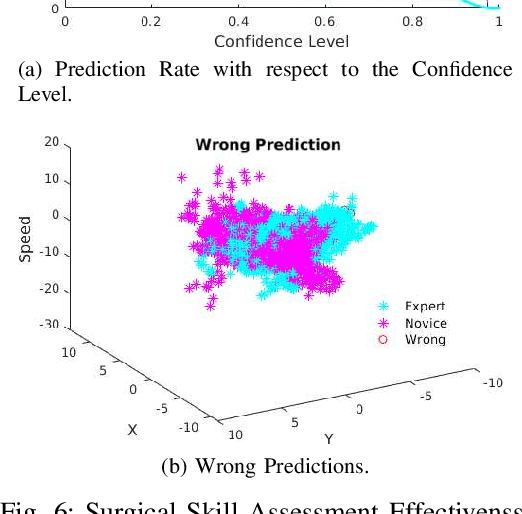
Endoscopic Sinus and Skull Base Surgeries (ESSBSs) is a challenging and potentially dangerous surgical procedure, and objective skill assessment is the key components to improve the effectiveness of surgical training, to re-validate surgeons' skills, and to decrease surgical trauma and the complication rate in operating rooms. Because of the complexity of surgical procedures, the variation of operation styles, and the fast development of new surgical skills, the surgical skill assessment remains a challenging problem. This work presents a novel Gaussian Process Learning-based heuristic automatic objective surgical skill assessment method for ESSBSs. Different with classical surgical skill assessment algorithms, the proposed method 1) utilizes the kinematic features in surgical instrument relative movements, instead of using specific surgical tasks or the statistics to assess skills in real-time; 2) provide informative feedback, instead of a summative scores; 3) has the ability to incrementally learn from new data, instead of depending on a fixed dataset. The proposed method projects the instrument movements into the endoscope coordinate to reduce the data dimensionality. It then extracts the kinematic features of the projected data and learns the relationship between surgical skill levels and the features with the Gaussian Process learning technique. The proposed method was verified in full endoscopic skull base and sinus surgeries on cadavers. These surgeries have different pathology, requires different treatment and has different complexities. The experimental results show that the proposed method reaches 100\% prediction precision for complete surgical procedures and 90\% precision for real-time prediction assessment.
Behavior Trees as a Representation for Medical Procedures
Aug 27, 2018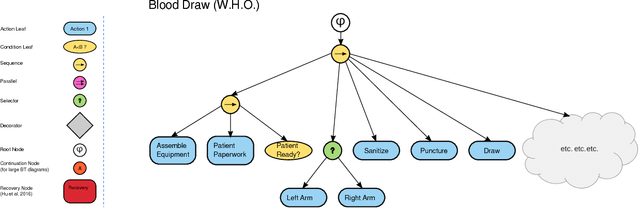
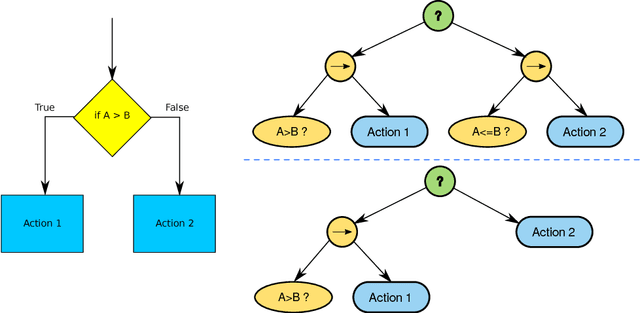
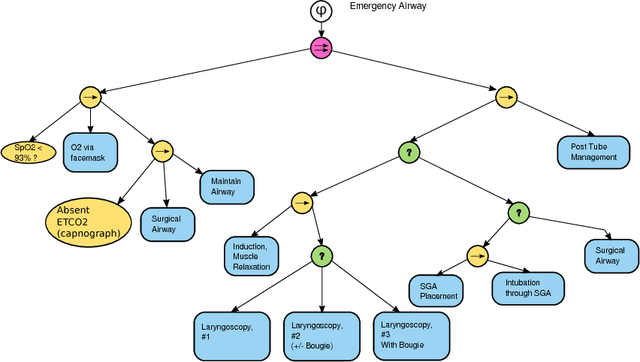
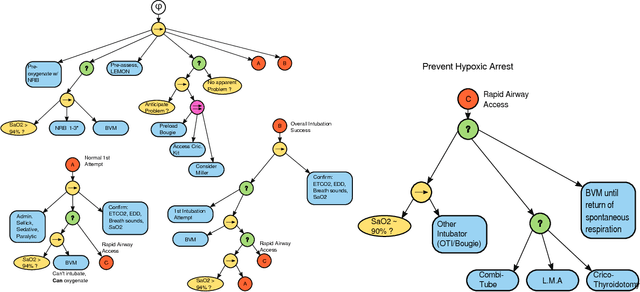
Objective: Effective collaboration between machines and clinicians requires flexible data structures to represent medical processes and clinical practice guidelines. Such a data structure could enable effective turn-taking between human and automated components of a complex treatment, accurate on-line monitoring of clinical treatments (for example to detect medical errors), or automated treatment systems (such as future medical robots) whose overall treatment plan is understandable and auditable by human experts. Materials and Methods: Behavior trees (BTs) emerged from video game development as a graphical language for modeling intelligent agent behavior. BTs have several properties which are attractive for modeling medical procedures including human-readability, authoring tools, and composability. Results: This paper will illustrate construction of BTs for exemplary medical procedures and clinical protocols. Discussion and Conclusion: Behavior Trees thus form a useful, and human authorable/readable bridge between clinical practice guidelines and AI systems.