 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Virtual Intraoperative CT for Image Guided Surgery
Dec 05, 2021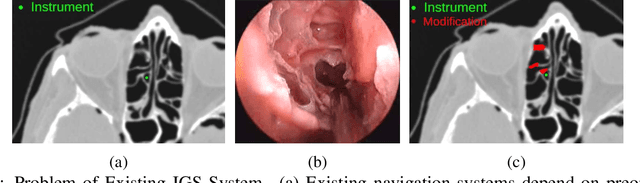
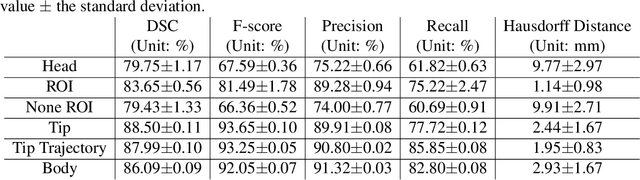
Abstract. Purpose: This paper presents a scheme for generating virtual intraoperative CT scans in order to improve surgical completeness in Endoscopic Sinus Surgeries (ESS). Approach: The work presents three methods, the tip motion-based, the tip trajectory-based, and the instrument based, along with non-parametric smoothing and Gaussian Process Regression, for virtual intraoperative CT generation. Results: The proposed methods studied and compared on ESS performed on cadavers. Surgical results show all three methods improve the Dice Similarity Coefficients > 86%, with F-score > 92% and precision > 89.91%. The tip trajectory-based method was found to have best performance and reached 96.87% precision in surgical completeness evaluation. Conclusions: This work demonstrated that virtual intraoperative CT scans improves the consistency between the actual surgical scene and the reference model, and improves surgical completeness in ESS. Comparing with actual intraoperative CT scans, the proposed scheme has no impact on existing surgical protocols, does not require extra hardware other than the one is already available in most ESS overcome the high costs, the repeated radiation, and the elongated anesthesia caused by actual intraoperative CTs, and is practical in ESS.
Real-time Informative Surgical Skill Assessment with Gaussian Process Learning
Dec 05, 2021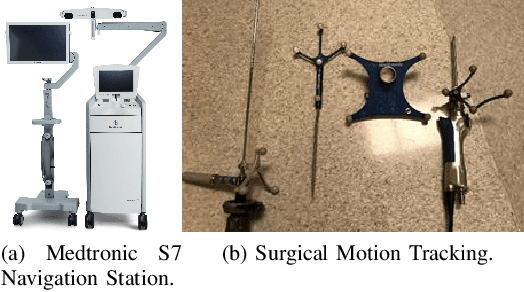
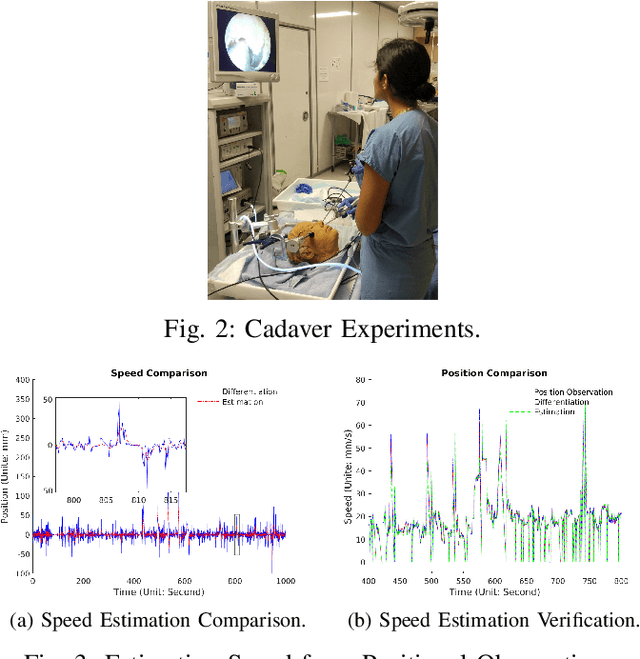
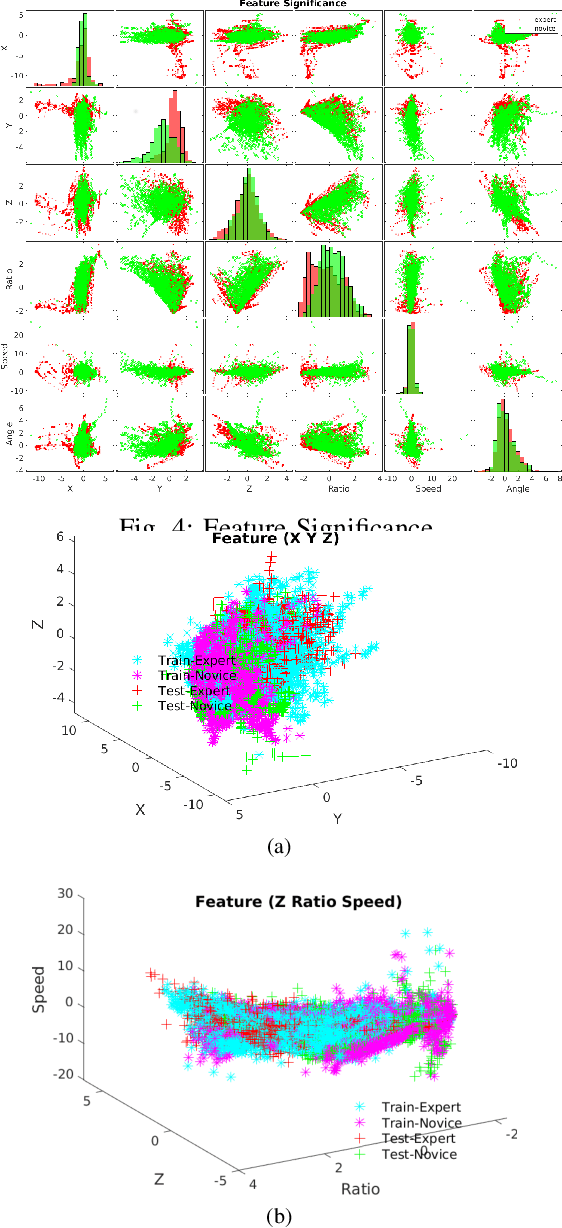
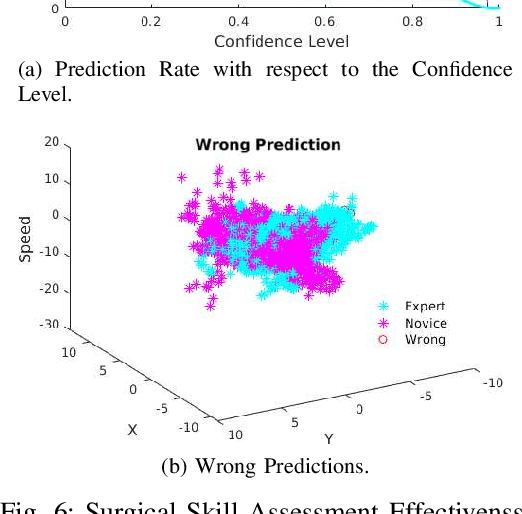
Endoscopic Sinus and Skull Base Surgeries (ESSBSs) is a challenging and potentially dangerous surgical procedure, and objective skill assessment is the key components to improve the effectiveness of surgical training, to re-validate surgeons' skills, and to decrease surgical trauma and the complication rate in operating rooms. Because of the complexity of surgical procedures, the variation of operation styles, and the fast development of new surgical skills, the surgical skill assessment remains a challenging problem. This work presents a novel Gaussian Process Learning-based heuristic automatic objective surgical skill assessment method for ESSBSs. Different with classical surgical skill assessment algorithms, the proposed method 1) utilizes the kinematic features in surgical instrument relative movements, instead of using specific surgical tasks or the statistics to assess skills in real-time; 2) provide informative feedback, instead of a summative scores; 3) has the ability to incrementally learn from new data, instead of depending on a fixed dataset. The proposed method projects the instrument movements into the endoscope coordinate to reduce the data dimensionality. It then extracts the kinematic features of the projected data and learns the relationship between surgical skill levels and the features with the Gaussian Process learning technique. The proposed method was verified in full endoscopic skull base and sinus surgeries on cadavers. These surgeries have different pathology, requires different treatment and has different complexities. The experimental results show that the proposed method reaches 100\% prediction precision for complete surgical procedures and 90\% precision for real-time prediction assessment.