 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus-based Recursive Multi-Output Gaussian Process
Apr 11, 2026Multi-output Gaussian Processes provide principled uncertainty-aware learning of vector-valued fields but are difficult to deploy in large-scale, distributed, and streaming settings due to their computational and centralized nature. This paper proposes a Consensus-based Recursive Multi-Output Gaussian Process (CRMGP) framework that combines recursive inference on shared basis vectors with neighbour-to-neighbour information-consensus updates. The resulting method supports parallel, fully distributed learning with bounded per-step computation while preserving inter-output correlations and calibrated uncertainty. Experiments on synthetic wind fields and real LiDAR data demonstrate that CRMGP achieves competitive predictive performance and reliable uncertainty calibration, offering a scalable alternative to centralized Gaussian process models for multi-agent sensing applications.
Multicluster Design and Control of Large-Scale Affine Formations
Mar 27, 2026Conventional affine formation control (AFC) empowers a network of agents with flexible but collective motions - a potential which has not yet been exploited for large-scale swarms. One of the key bottlenecks lies in the design of an interaction graph, characterized by the Laplacian-like stress matrix. Efficient and scalable design solutions often yield suboptimal solutions on various performance metrics, e.g., convergence speed and communication cost, to name a few. The current state-of-the-art algorithms for finding optimal solutions are computationally expensive and therefore not scalable. In this work, we propose a more efficient optimal design for any generic configuration, with the potential to further reduce complexity for a large class of nongeneric rotationally symmetric configurations. Furthermore, we introduce a multicluster control framework that offers an additional scalability improvement, enabling not only collective affine motions as in conventional AFC but also partially independent motions naturally desired for large-scale swarms. The overall design is compatible with a swarm size of several hundred agents with fast formation convergence, as compared to up to only a few dozen agents by existing methods. Experimentally, we benchmark the performance of our algorithm compared with several state-of-the-art solutions and demonstrate the capabilities of our proposed control strategies.
Graph Topology Identification Based on Covariance Matching
Jan 22, 2026Graph topology identification (GTI) is a central challenge in networked systems, where the underlying structure is often hidden, yet nodal data are available. Conventional solutions to address these challenges rely on probabilistic models or complex optimization formulations, commonly suffering from non-convexity or requiring restrictive assumptions on acyclicity or positivity. In this paper, we propose a novel covariance matching (CovMatch) framework that directly aligns the empirical covariance of the observed data with the theoretical covariance implied by an underlying graph. We show that as long as the data-generating process permits an explicit covariance expression, CovMatch offers a unified route to topology inference. We showcase our methodology on linear structural equation models (SEMs), showing that CovMatch naturally handles both undirected and general sparse directed graphs - whether acyclic or positively weighted - without explicit knowledge of these structural constraints. Through appropriate reparameterizations, CovMatch simplifies the graph learning problem to either a conic mixed integer program for undirected graphs or an orthogonal matrix optimization for directed graphs. Numerical results confirm that, even for relatively large graphs, our approach efficiently recovers the true topology and outperforms standard baselines in accuracy. These findings highlight CovMatch as a powerful alternative to log-determinant or Bayesian methods for GTI, paving the way for broader research on learning complex network topologies with minimal assumptions.
Autonomous Navigation Of Quadrupeds Using Coverage Path Planning
Apr 24, 2025This paper proposes a novel method of coverage path planning for the purpose of scanning an unstructured environment autonomously. The method uses the morphological skeleton of the prior 2D navigation map via SLAM to generate a sequence of points of interest (POIs). This sequence is then ordered to create an optimal path given the robot's current position. To control the high-level operation, a finite state machine is used to switch between two modes: navigating towards a POI using Nav2, and scanning the local surrounding. We validate the method in a leveled indoor obstacle-free non-convex environment on time efficiency and reachability over five trials. The map reader and the path planner can quickly process maps of width and height ranging between [196,225] pixels and [185,231] pixels in 2.52 ms/pixel and 1.7 ms/pixel, respectively, where their computation time increases with 22.0 ns/pixel and 8.17 $\mu$s/pixel, respectively. The robot managed to reach 86.5\% of all waypoints over all five runs. The proposed method suffers from drift occurring in the 2D navigation map.
Robust Affine Formation Control of Multiagent Systems
Jul 04, 2024
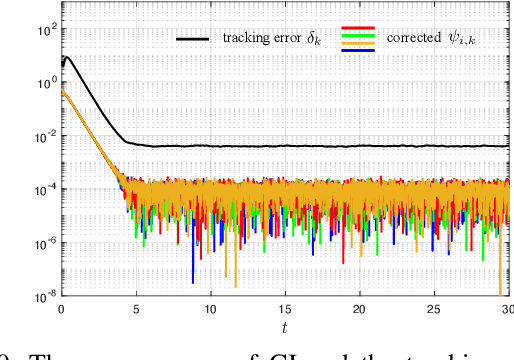
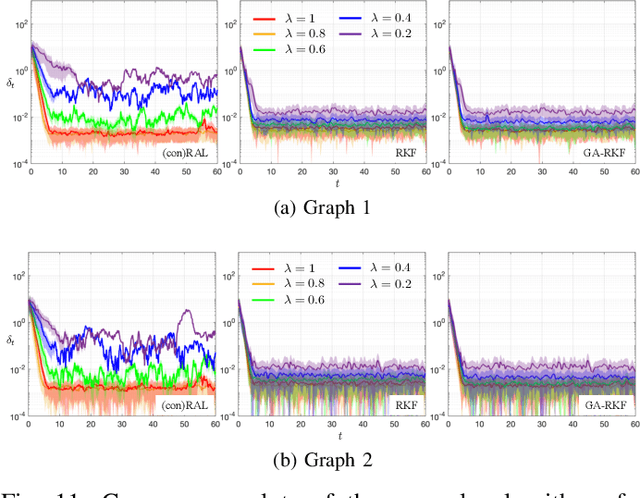
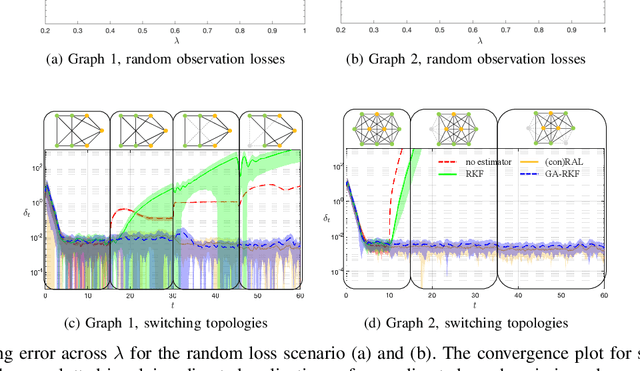
Affine formation control is a subset of formation control methods, which has gained increasing popularity for its flexibility and maneuverability in diverse applications. Affine formation control is inherently distributed in nature, where the local controllers onboard each agent are linearly dependent on the relative position measurements of the neighboring agents. The unavailability of these measurements in practice, due to node failure or missing links, leads to a change in the underlying graph topology, and subsequently causes instability and sub-optimal performance. In this paper, we propose an estimation framework to enhance the robustness of distributed affine formation control systems against these topology changes. Our estimation framework features an adaptive fusion of both temporal information from the dynamics of agents and spatial information which is derived from the geometry of the affine formations. We propose a suite of algorithms under this framework to tackle various practical scenarios, and numerically verify our proposed estimator on stability, convergence rate, and optimality criterion. Simulations show the performance of our proposed algorithms as compared to the state-of-the-art methods, and we summarize them with future research directions.
RAPF: Efficient path planning for lunar microrovers
May 26, 2024



Efficient path planning is key for safe autonomous navigation over complex and unknown terrains. Lunar Zebro (LZ), a project of the Delft University of Technology, aims to deploy a compact rover, no larger than an A4 sheet of paper and weighing not more than 3 kilograms. In this work, we introduce a Robust Artificial Potential Field (RAPF) algorithm, a new path-planning algorithm for reliable local navigation solution for lunar microrovers. RAPF leverages and improves state of the art Artificial Potential Field (APF)-based methods by incorporating the position of the robot in the generation of bacteria points and considering local minima as regions to avoid. We perform both simulations and on field experiments to validate the performance of RAPF, which outperforms state-of-the-art APF-based algorithms by over 15% in reachability within a similar or shorter planning time. The improvements resulted in a 200% higher success rate and 50% lower computing time compared to the conventional APF algorithm. Near-optimal paths are computed in real-time with limited available processing power. The bacterial approach of the RAPF algorithm proves faster to execute and smaller to store than path planning algorithms used in existing planetary rovers, showcasing its potential for reliable lunar exploration with computationally constrained and energy constrained robotic systems.
Improving GPS-VIO Fusion with Adaptive Rotational Calibration
Sep 21, 2023
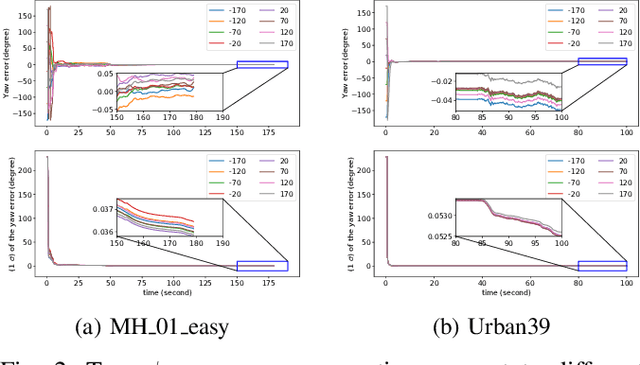

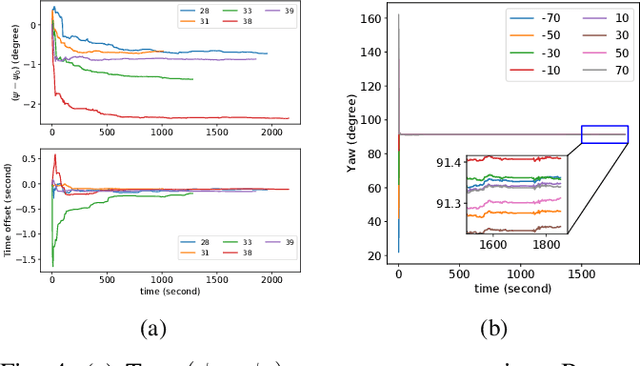
Accurate global localization is crucial for autonomous navigation and planning. To this end, GPS-aided Visual-Inertial Odometry (GPS-VIO) fusion algorithms are proposed in the literature. This paper presents a novel GPS-VIO system that is able to significantly benefit from the online adaptive calibration of the rotational extrinsic parameter between the GPS reference frame and the VIO reference frame. The behind reason is this parameter is observable. This paper provides novel proof through nonlinear observability analysis. We also evaluate the proposed algorithm extensively on diverse platforms, including flying UAV and driving vehicle. The experimental results support the observability analysis and show increased localization accuracy in comparison to state-of-the-art (SOTA) tightly-coupled algorithms.
Cooperative Sense and Avoid for UAVs using Secondary Radar
Jun 05, 2023A new Sense and Avoid (SAA) method for safe navigation of small-sized UAVs within an airspace is proposed in this paper. The proposed method relies upon cooperation between the UAV and the surrounding transponder-equipped aviation obstacles. To do so, the aviation obstacles share their altitude and their identification code with the UAV by using a miniaturized Mode S operation Secondary surveillance radar (SSR) after interrogation. The proposed SAA algorithm removes the need for a primary radar and a clock synchronization since it relies on the estimate of the aviation obstacle's elevation angle for ranging. This results in more accurate ranging compared to the round-trip time-based ranging. We also propose a new radial velocity estimator for the Mode S operation of the SSR which is employed in the proposed SAA system. The root-mean-square error (RMSE) of the proposed estimators are analytically derived. Moreover, by considering the pulse-position modulation (PPM) of the transponder reply as a waveform of pulse radar with staggered multiple pulse repetition frequencies, the maximum unambiguous radial velocity is obtained. Given these estimated parameters, our proposed SAA method classifies the aviation obstacles into high-, medium-, and low-risk intruders. The output of the classifier enables the UAV to plan its path or maneuver for safe navigation accordingly. The effectiveness of the proposed estimators and the SAA method is confirmed through simulation experiments.
On the choice of reference in sensor offset calibration
Dec 25, 2022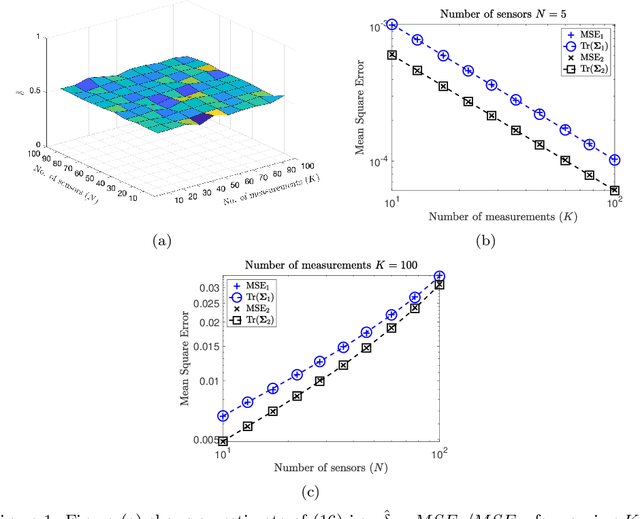
Sensor calibration is an indispensable feature in any networked cyberphysical system. In this paper we consider a sensor network plagued with offset errors measuring a rank-1 signal subspace where each sensor collects measurements under additive zero-mean Gaussian noise. Under varying assumptions on the underlying noise covariance, we investigate the effect of using an arbitrary reference for estimating the sensor offsets in contrast to the mean of all the unknown sensor offsets as a reference. We show that the mean reference yields an efficient estimator in the mean square error sense. If the underlying noise is homoscedastic in nature then the mean reference yields a factor 2 improvement on the variance as compared any arbitrarily chosen reference within the network. Furthermore when the underlying noise is independent, but not identical, we derive an expression for the improvement offered by the mean reference. We demonstrate our results using the problem of clock synchronization in sensor networks, and present directions for future work.
Multi-FEAT: Multi-Feature Edge AlignmenT for Targetless Camera-LiDAR Calibration
Jul 14, 2022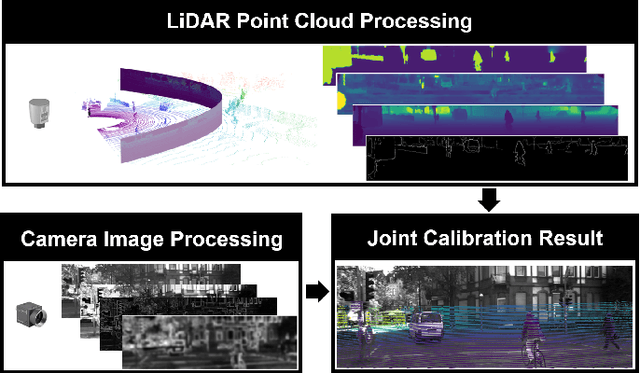
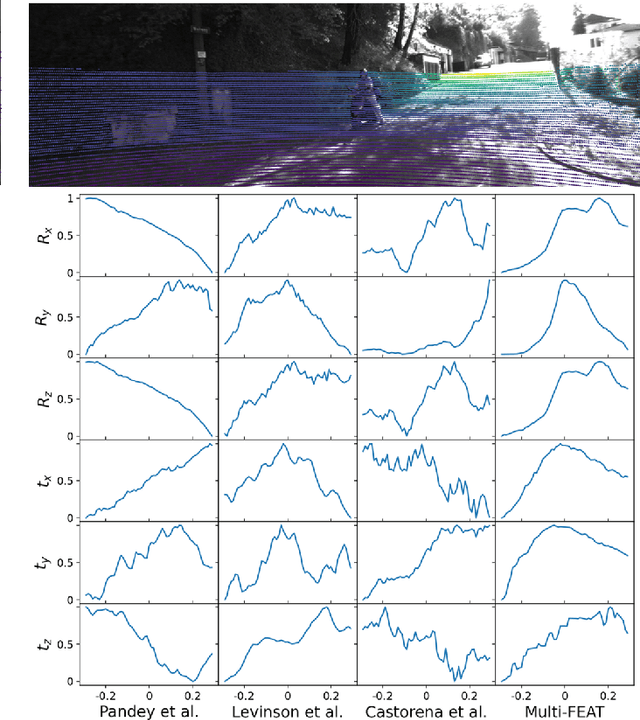
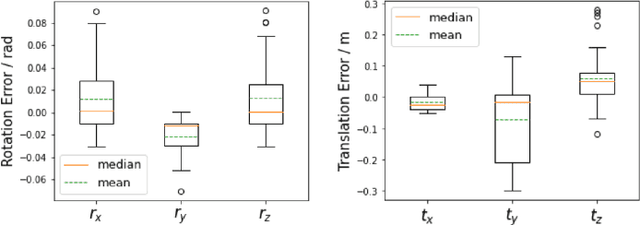
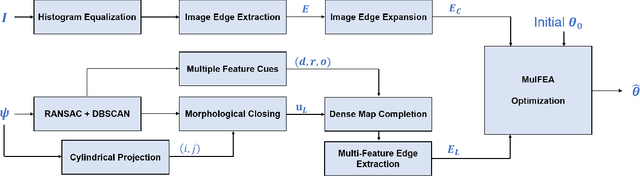
The accurate environment perception of automobiles and UAVs (Unmanned Ariel Vehicles) relies on the precision of onboard sensors, which require reliable in-field calibration. This paper introduces a novel approach for targetless camera-LiDAR extrinsic calibration called Multi-FEAT (Multi-Feature Edge AlignmenT). Multi-FEAT uses the cylindrical projection model to transform the 2D(Camera)-3D(LiDAR) calibration problem into a 2D-2D calibration problem, and exploits various LiDAR feature information to supplement the sparse LiDAR point cloud boundaries. In addition, a feature matching function with a precision factor is designed to improve the smoothness of the solution space. The performance of the proposed Multi-FEAT algorithm is evaluated using the KITTI dataset, and our approach shows more reliable results, as compared with several existing targetless calibration methods. We summarize our results and present potential directions for future work.