 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Kinematics Estimation Using Accelerometer Measurements
Dec 14, 2021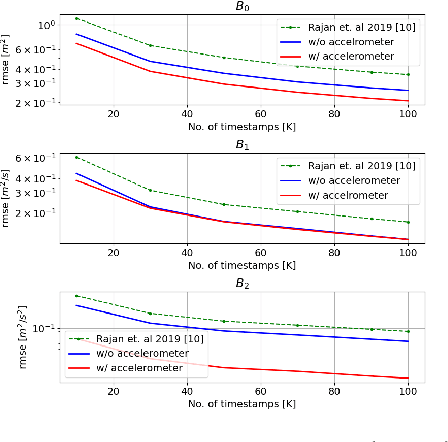
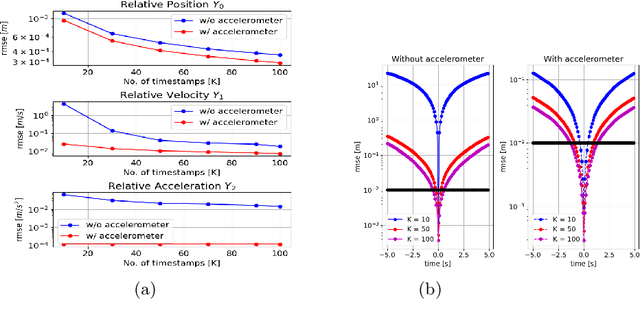
Given a network of $N$ static nodes in $D$-dimensional space and the pairwise distances between them, the challenge of estimating the coordinates of the nodes is a well-studied problem. However, for numerous application domains, the nodes are mobile and the estimation of relative kinematics (e.g., position, velocity and acceleration) is a challenge, which has received limited attention in literature. In this paper, we propose a time-varying Grammian-based data model for estimating the relative kinematics of mobile nodes with polynomial trajectories, given the time-varying pairwise distance measurements between the nodes. Furthermore, we consider a scenario where the nodes have on-board accelerometers, and extend the proposed data model to include these accelerometer measurements. We propose closed-form solutions to estimate the relative kinematics, based on the proposed data models. We conduct simulations to showcase the performance of the proposed estimators, which show improvement against state-of-the-art methods.