 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnleashing the Power of Discrete-Time State Representation: Ultrafast Target-based IMU-Camera Spatial-Temporal Calibration
Sep 16, 2025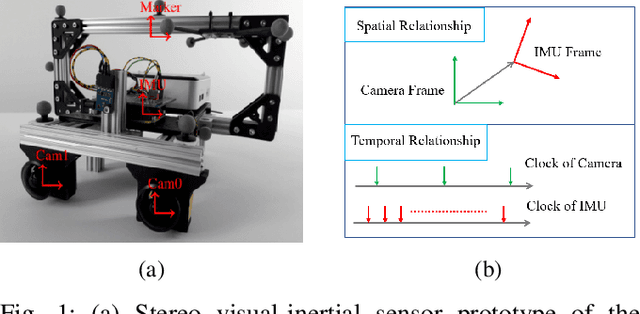
Visual-inertial fusion is crucial for a large amount of intelligent and autonomous applications, such as robot navigation and augmented reality. To bootstrap and achieve optimal state estimation, the spatial-temporal displacements between IMU and cameras must be calibrated in advance. Most existing calibration methods adopt continuous-time state representation, more specifically the B-spline. Despite these methods achieve precise spatial-temporal calibration, they suffer from high computational cost caused by continuous-time state representation. To this end, we propose a novel and extremely efficient calibration method that unleashes the power of discrete-time state representation. Moreover, the weakness of discrete-time state representation in temporal calibration is tackled in this paper. With the increasing production of drones, cellphones and other visual-inertial platforms, if one million devices need calibration around the world, saving one minute for the calibration of each device means saving 2083 work days in total. To benefit both the research and industry communities, our code will be open-source.
Structureless VIO
May 18, 2025
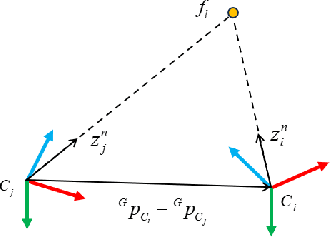
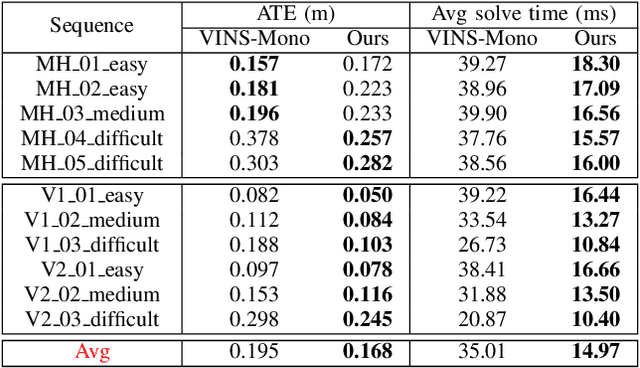
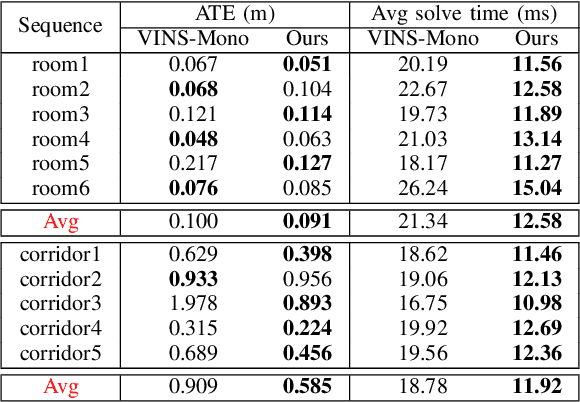
Visual odometry (VO) is typically considered as a chicken-and-egg problem, as the localization and mapping modules are tightly-coupled. The estimation of visual map relies on accurate localization information. Meanwhile, localization requires precise map points to provide motion constraints. This classical design principle is naturally inherited by visual-inertial odometry (VIO). Efficient localization solution that does not require a map has not been fully investigated. To this end, we propose a novel structureless VIO, where the visual map is removed from the odometry framework. Experimental results demonstrated that, compared to the structure-based VIO baseline, our structureless VIO not only substantially improves computational efficiency but also has advantages in accuracy.
Improving Monocular Visual-Inertial Initialization with Structureless Visual-Inertial Bundle Adjustment
Feb 23, 2025Monocular visual inertial odometry (VIO) has facilitated a wide range of real-time motion tracking applications, thanks to the small size of the sensor suite and low power consumption. To successfully bootstrap VIO algorithms, the initialization module is extremely important. Most initialization methods rely on the reconstruction of 3D visual point clouds. These methods suffer from high computational cost as state vector contains both motion states and 3D feature points. To address this issue, some researchers recently proposed a structureless initialization method, which can solve the initial state without recovering 3D structure. However, this method potentially compromises performance due to the decoupled estimation of rotation and translation, as well as linear constraints. To improve its accuracy, we propose novel structureless visual-inertial bundle adjustment to further refine previous structureless solution. Extensive experiments on real-world datasets show our method significantly improves the VIO initialization accuracy, while maintaining real-time performance.
An Accurate Filter-based Visual Inertial External Force Estimator via Instantaneous Accelerometer Update
Aug 29, 2024
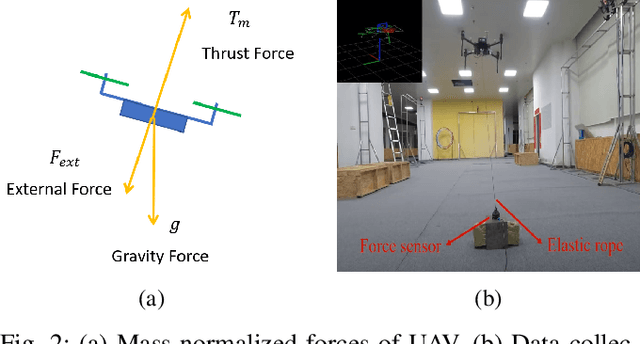
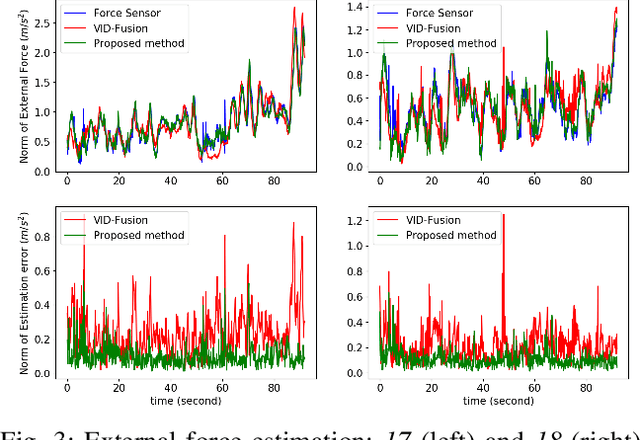
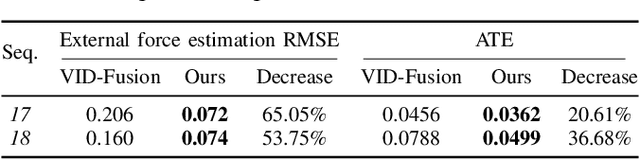
Accurate disturbance estimation is crucial for reliable robotic physical interaction. To estimate environmental interference in a low-cost and sensorless way (without force sensor), a variety of tightly-coupled visual inertial external force estimators are proposed in the literature. However, existing solutions may suffer from relatively low-frequency preintegration. In this paper, a novel estimator is designed to overcome this issue via high-frequency instantaneous accelerometer update.
A novel fault localization with data refinement for hydroelectric units
May 30, 2024Due to the scarcity of fault samples and the complexity of non-linear and non-smooth characteristics data in hydroelectric units, most of the traditional hydroelectric unit fault localization methods are difficult to carry out accurate localization. To address these problems, a sparse autoencoder (SAE)-generative adversarial network (GAN)-wavelet noise reduction (WNR)- manifold-boosted deep learning (SG-WMBDL) based fault localization method for hydroelectric units is proposed. To overcome the data scarcity, a SAE is embedded into the GAN to generate more high-quality samples in the data generation module. Considering the signals involving non-linear and non-smooth characteristics, the improved WNR which combining both soft and hard thresholding and local linear embedding (LLE) are utilized to the data preprocessing module in order to reduce the noise and effectively capture the local features. In addition, to seek higher performance, the novel Adaptive Boost (AdaBoost) combined with multi deep learning is proposed to achieve accurate fault localization. The experimental results show that the SG-WMBDL can locate faults for hydroelectric units under a small number of fault samples with non-linear and non-smooth characteristics on higher precision and accuracy compared to other frontier methods, which verifies the effectiveness and practicality of the proposed method.
Combining Radiomics and Machine Learning Approaches for Objective ASD Diagnosis: Verifying White Matter Associations with ASD
May 25, 2024Autism Spectrum Disorder is a condition characterized by a typical brain development leading to impairments in social skills, communication abilities, repetitive behaviors, and sensory processing. There have been many studies combining brain MRI images with machine learning algorithms to achieve objective diagnosis of autism, but the correlation between white matter and autism has not been fully utilized. To address this gap, we develop a computer-aided diagnostic model focusing on white matter regions in brain MRI by employing radiomics and machine learning methods. This study introduced a MultiUNet model for segmenting white matter, leveraging the UNet architecture and utilizing manually segmented MRI images as the training data. Subsequently, we extracted white matter features using the Pyradiomics toolkit and applied different machine learning models such as Support Vector Machine, Random Forest, Logistic Regression, and K-Nearest Neighbors to predict autism. The prediction sets all exceeded 80% accuracy. Additionally, we employed Convolutional Neural Network to analyze segmented white matter images, achieving a prediction accuracy of 86.84%. Notably, Support Vector Machine demonstrated the highest prediction accuracy at 89.47%. These findings not only underscore the efficacy of the models but also establish a link between white matter abnormalities and autism. Our study contributes to a comprehensive evaluation of various diagnostic models for autism and introduces a computer-aided diagnostic algorithm for early and objective autism diagnosis based on MRI white matter regions.
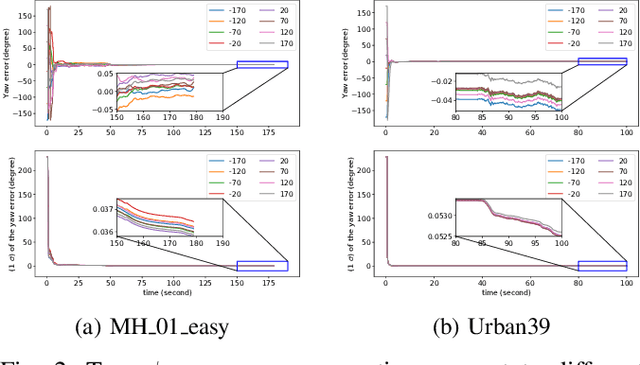
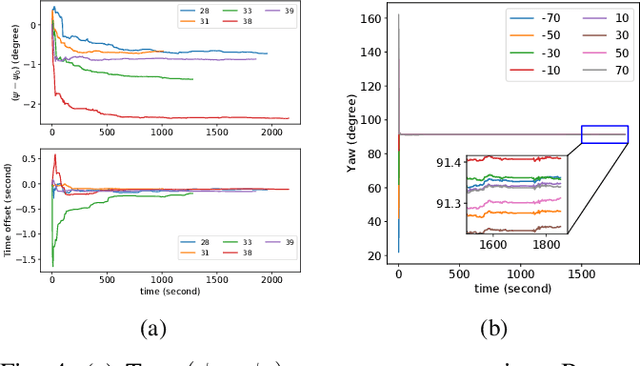
Joint Spatial-Temporal Calibration for Camera and Global Pose Sensor
Mar 01, 2024
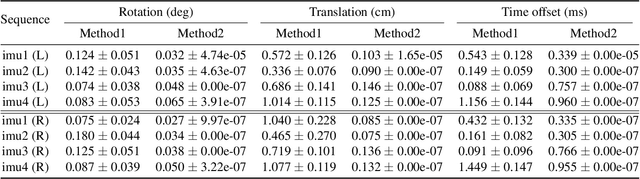


In robotics, motion capture systems have been widely used to measure the accuracy of localization algorithms. Moreover, this infrastructure can also be used for other computer vision tasks, such as the evaluation of Visual (-Inertial) SLAM dynamic initialization, multi-object tracking, or automatic annotation. Yet, to work optimally, these functionalities require having accurate and reliable spatial-temporal calibration parameters between the camera and the global pose sensor. In this study, we provide two novel solutions to estimate these calibration parameters. Firstly, we design an offline target-based method with high accuracy and consistency. Spatial-temporal parameters, camera intrinsic, and trajectory are optimized simultaneously. Then, we propose an online target-less method, eliminating the need for a calibration target and enabling the estimation of time-varying spatial-temporal parameters. Additionally, we perform detailed observability analysis for the target-less method. Our theoretical findings regarding observability are validated by simulation experiments and provide explainable guidelines for calibration. Finally, the accuracy and consistency of two proposed methods are evaluated with hand-held real-world datasets where traditional hand-eye calibration method do not work.
Improving GPS-VIO Fusion with Adaptive Rotational Calibration
Sep 21, 2023

Accurate global localization is crucial for autonomous navigation and planning. To this end, GPS-aided Visual-Inertial Odometry (GPS-VIO) fusion algorithms are proposed in the literature. This paper presents a novel GPS-VIO system that is able to significantly benefit from the online adaptive calibration of the rotational extrinsic parameter between the GPS reference frame and the VIO reference frame. The behind reason is this parameter is observable. This paper provides novel proof through nonlinear observability analysis. We also evaluate the proposed algorithm extensively on diverse platforms, including flying UAV and driving vehicle. The experimental results support the observability analysis and show increased localization accuracy in comparison to state-of-the-art (SOTA) tightly-coupled algorithms.
GPS-aided Visual Wheel Odometry
Aug 29, 2023



This paper introduces a novel GPS-aided visual-wheel odometry (GPS-VWO) for ground robots. The state estimation algorithm tightly fuses visual, wheeled encoder and GPS measurements in the way of Multi-State Constraint Kalman Filter (MSCKF). To avoid accumulating calibration errors over time, the proposed algorithm calculates the extrinsic rotation parameter between the GPS global coordinate frame and the VWO reference frame online as part of the estimation process. The convergence of this extrinsic parameter is guaranteed by the observability analysis and verified by using real-world visual and wheel encoder measurements as well as simulated GPS measurements. Moreover, a novel theoretical finding is presented that the variance of unobservable state could converge to zero for specific Kalman filter system. We evaluate the proposed system extensively in large-scale urban driving scenarios. The results demonstrate that better accuracy than GPS is achieved through the fusion of GPS and VWO. The comparison between extrinsic parameter calibration and non-calibration shows significant improvement in localization accuracy thanks to the online calibration.