Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Accurate Filter-based Visual Inertial External Force Estimator via Instantaneous Accelerometer Update
Paper and Code
Aug 29, 2024
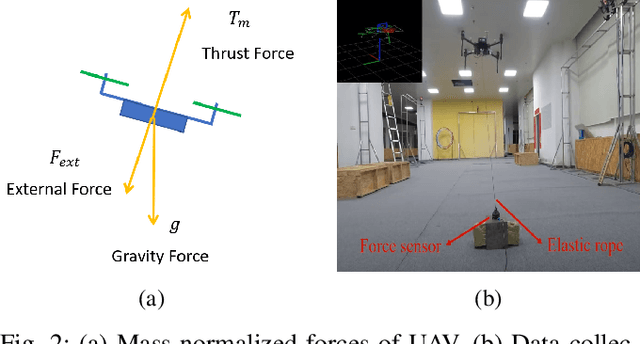
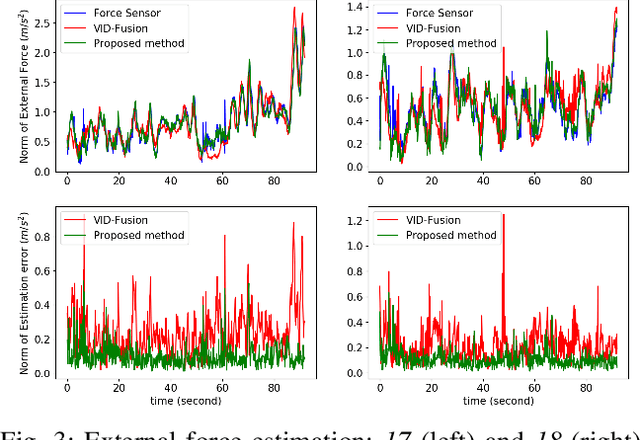
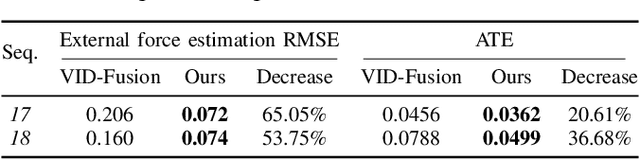
Accurate disturbance estimation is crucial for reliable robotic physical interaction. To estimate environmental interference in a low-cost and sensorless way (without force sensor), a variety of tightly-coupled visual inertial external force estimators are proposed in the literature. However, existing solutions may suffer from relatively low-frequency preintegration. In this paper, a novel estimator is designed to overcome this issue via high-frequency instantaneous accelerometer update.
* Accepted by the 40th Anniversary of the IEEE Conference on Robotics
and Automation (ICRA@40)
View paper on