 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Kalman Filters for Relative Formation Control of Mobile Agents
Oct 12, 2021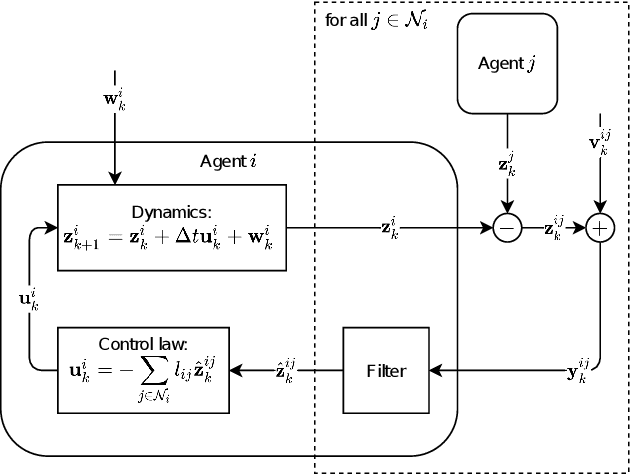
Formation control (FC) of multi-agent plays a critical role in a wide variety of fields. In the absence of absolute positioning, agents in FC systems rely on relative position measurements with respect to their neighbors. In distributed filter design literature, relative observation models are comparatively unexplored, and in FC literature, uncertainty models are rarely considered. In this article, we aim to bridge the gap between these domains, by exploring distributed filters tailored for relative FC of swarms. We propose statistically robust data models for tracking relative positions of agents in a FC network, and subsequently propose optimal Kalman filters for both centralized and distributed scenarios. Our simulations highlight the benefits of these estimators, and we identify future research directions based on our proposed framework.