 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroducing Semantic Capability in LinkedIn's Content Search Engine
Dec 29, 2024



In the past, most search queries issued to a search engine were short and simple. A keyword based search engine was able to answer such queries quite well. However, members are now developing the habit of issuing long and complex natural language queries. Answering such queries requires evolution of a search engine to have semantic capability. In this paper we present the design of LinkedIn's new content search engine with semantic capability, and its impact on metrics.
Multiple-Hypothesis Path Planning with Uncertain Object Detections
Aug 14, 2023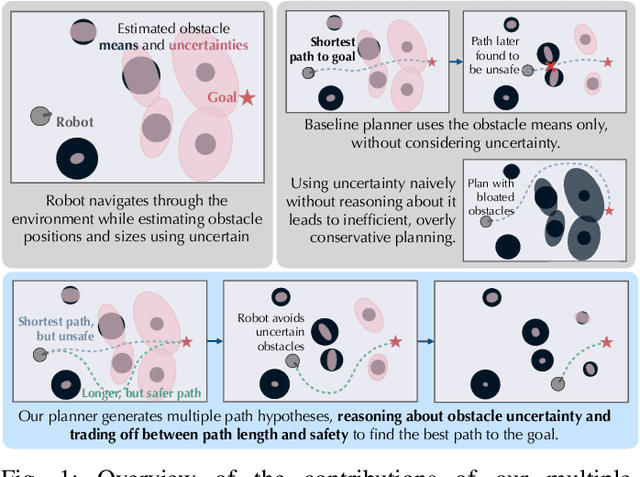
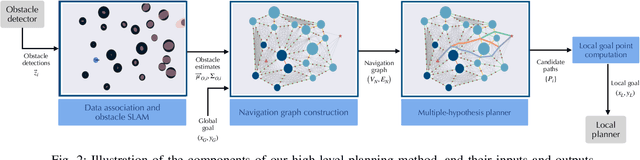
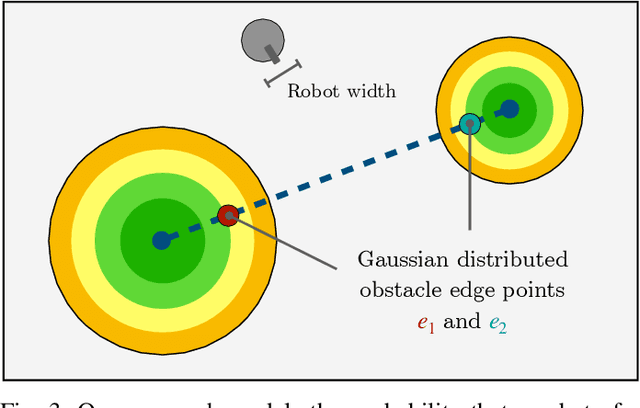
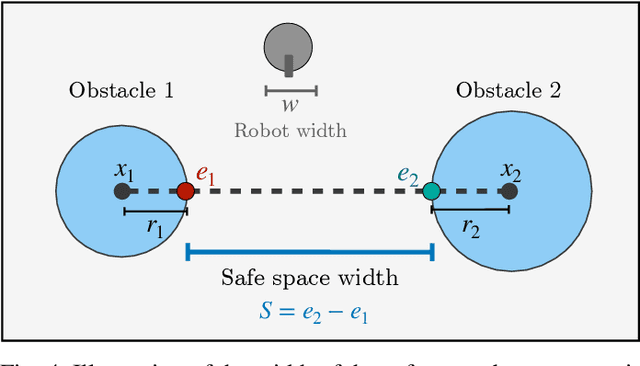
Path planning in obstacle-dense environments is a key challenge in robotics, and depends on inferring scene attributes and associated uncertainties. We present a multiple-hypothesis path planner designed to navigate complex environments using obstacle detections. Path hypotheses are generated by reasoning about uncertainty and range, as initial detections are typically at far ranges with high uncertainty, before subsequent detections reduce this uncertainty. Given estimated obstacles, we build a graph of pairwise connections between objects based on the probability that the robot can safely pass between the pair. The graph is updated in real time and pruned of unsafe paths, providing probabilistic safety guarantees. The planner generates path hypotheses over this graph, then trades between safety and path length to intelligently optimize the best route. We evaluate our planner on randomly generated simulated forests, and find that in the most challenging environments, it increases the navigation success rate over an A* baseline from 20% to 75%. Results indicate that the use of evolving, range-based uncertainty and multiple hypotheses are critical for navigating dense environments.
Graph-based Simultaneous Coverage and Exploration Planning for Fast Multi-robot Search
Mar 03, 2023



In large unknown environments, search operations can be much more time-efficient with the use of multi-robot fleets by parallelizing efforts. This means robots must efficiently perform collaborative mapping (exploration) while simultaneously searching an area for victims (coverage). Previous simultaneous mapping and planning techniques treat these problems as separate and do not take advantage of the possibility for a unified approach. We propose a novel exploration-coverage planner which bridges the mapping and search domains by growing sets of random trees rooted upon a pose graph produced through mapping to generate points of interest, or tasks. Furthermore, it is important for the robots to first prioritize high information tasks to locate the greatest number of victims in minimum time by balancing coverage and exploration, which current methods do not address. Towards this goal, we also present a new multi-robot task allocator that formulates a notion of a hierarchical information heuristic for time-critical collaborative search. Our results show that our algorithm produces 20% more coverage efficiency, defined as average covered area per second, compared to the existing state-of-the-art. Our algorithms and the rest of our multi-robot search stack is based in ROS and made open source
Exploiting Natural Language for Efficient Risk-Aware Multi-robot SaR Planning
Apr 08, 2021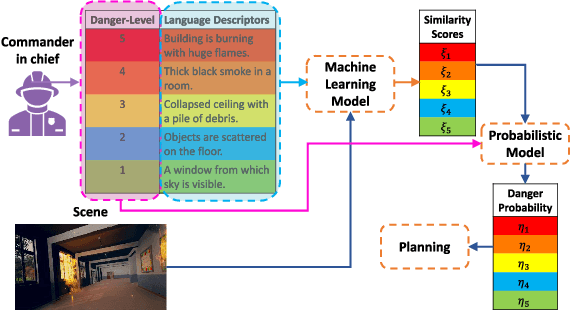
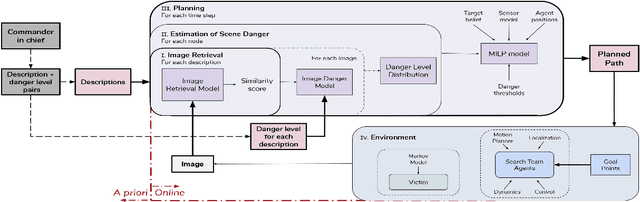


The ability to develop a high-level understanding of a scene, such as perceiving danger levels, can prove valuable in planning multi-robot search and rescue (SaR) missions. In this work, we propose to uniquely leverage natural language descriptions from the mission commander in chief and image data captured by robots to estimate scene danger. Given a description and an image, a state-of-the-art deep neural network is used to assess a corresponding similarity score, which is then converted into a probabilistic distribution of danger levels. Because commonly used visio-linguistic datasets do not represent SaR missions well, we collect a large-scale image-description dataset from synthetic images taken from realistic disaster scenes and use it to train our machine learning model. A risk-aware variant of the Multi-robot Efficient Search Path Planning (MESPP) problem is then formulated to use the danger estimates in order to account for high-risk locations in the environment when planning the searchers' paths. The problem is solved via a distributed approach based on Mixed-Integer Linear Programming. Our experiments demonstrate that our framework allows to plan safer yet highly successful search missions, abiding to the two most important aspects of SaR missions: to ensure both searchers' and victim safety.
* 8 pages, 5 figures. To be presented at the IEEE International Conference on Robotics and Automation, 2021. Dataset available at: https://github.com/vikshree/DISC-L.git