 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-informed diffusion models in spectral space
Feb 10, 2026We propose a methodology that combines generative latent diffusion models with physics-informed machine learning to generate solutions of parametric partial differential equations (PDEs) conditioned on partial observations, which includes, in particular, forward and inverse PDE problems. We learn the joint distribution of PDE parameters and solutions via a diffusion process in a latent space of scaled spectral representations, where Gaussian noise corresponds to functions with controlled regularity. This spectral formulation enables significant dimensionality reduction compared to grid-based diffusion models and ensures that the induced process in function space remains within a class of functions for which the PDE operators are well defined. Building on diffusion posterior sampling, we enforce physics-informed constraints and measurement conditions during inference, applying Adam-based updates at each diffusion step. We evaluate the proposed approach on Poisson, Helmholtz, and incompressible Navier--Stokes equations, demonstrating improved accuracy and computational efficiency compared with existing diffusion-based PDE solvers, which are state of the art for sparse observations. Code is available at https://github.com/deeplearningmethods/PISD.
Deep Legendre Transform
Dec 22, 2025We introduce a novel deep learning algorithm for computing convex conjugates of differentiable convex functions, a fundamental operation in convex analysis with various applications in different fields such as optimization, control theory, physics and economics. While traditional numerical methods suffer from the curse of dimensionality and become computationally intractable in high dimensions, more recent neural network-based approaches scale better, but have mostly been studied with the aim of solving optimal transport problems and require the solution of complicated optimization or max-min problems. Using an implicit Fenchel formulation of convex conjugation, our approach facilitates an efficient gradient-based framework for the minimization of approximation errors and, as a byproduct, also provides a posteriori error estimates for the approximation quality. Numerical experiments demonstrate our method's ability to deliver accurate results across different high-dimensional examples. Moreover, by employing symbolic regression with Kolmogorov--Arnold networks, it is able to obtain the exact convex conjugates of specific convex functions.
Computing Optimal Transport Maps and Wasserstein Barycenters Using Conditional Normalizing Flows
May 28, 2025We present a novel method for efficiently computing optimal transport maps and Wasserstein barycenters in high-dimensional spaces. Our approach uses conditional normalizing flows to approximate the input distributions as invertible pushforward transformations from a common latent space. This makes it possible to directly solve the primal problem using gradient-based minimization of the transport cost, unlike previous methods that rely on dual formulations and complex adversarial optimization. We show how this approach can be extended to compute Wasserstein barycenters by solving a conditional variance minimization problem. A key advantage of our conditional architecture is that it enables the computation of barycenters for hundreds of input distributions, which was computationally infeasible with previous methods. Our numerical experiments illustrate that our approach yields accurate results across various high-dimensional tasks and compares favorably with previous state-of-the-art methods.
Deep Learning for Continuous-time Stochastic Control with Jumps
May 21, 2025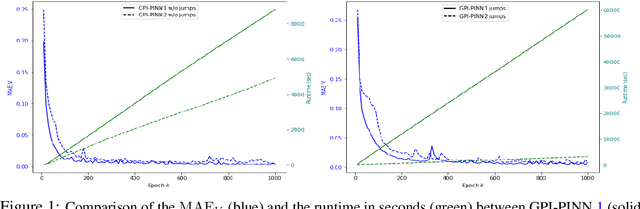
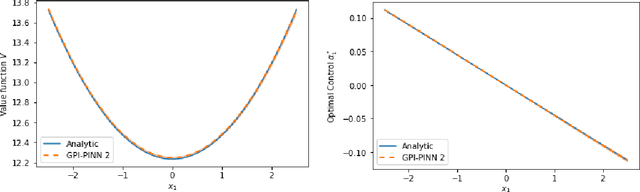
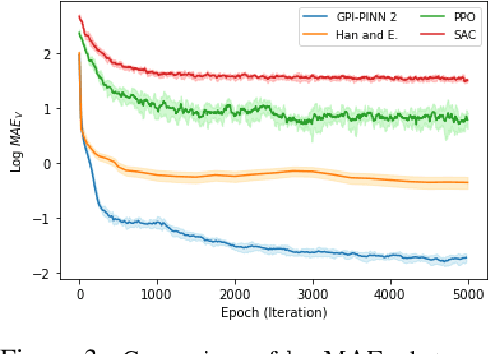
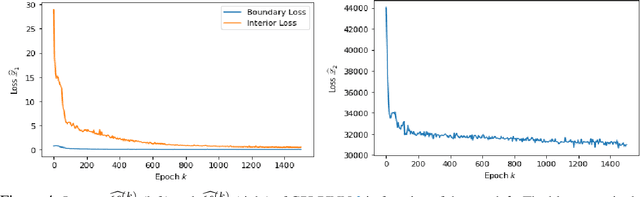
In this paper, we introduce a model-based deep-learning approach to solve finite-horizon continuous-time stochastic control problems with jumps. We iteratively train two neural networks: one to represent the optimal policy and the other to approximate the value function. Leveraging a continuous-time version of the dynamic programming principle, we derive two different training objectives based on the Hamilton-Jacobi-Bellman equation, ensuring that the networks capture the underlying stochastic dynamics. Empirical evaluations on different problems illustrate the accuracy and scalability of our approach, demonstrating its effectiveness in solving complex, high-dimensional stochastic control tasks.
Gradient descent provably escapes saddle points in the training of shallow ReLU networks
Aug 03, 2022Dynamical systems theory has recently been applied in optimization to prove that gradient descent algorithms avoid so-called strict saddle points of the loss function. However, in many modern machine learning applications, the required regularity conditions are not satisfied. In particular, this is the case for rectified linear unit (ReLU) networks. In this paper, we prove a variant of the relevant dynamical systems result, a center-stable manifold theorem, in which we relax some of the regularity requirements. Then, we verify that shallow ReLU networks fit into the new framework. Building on a classification of critical points of the square integral loss of shallow ReLU networks measured against an affine target function, we deduce that gradient descent avoids most saddle points. We proceed to prove convergence to global minima if the initialization is sufficiently good, which is expressed by an explicit threshold on the limiting loss.
Computation of conditional expectations with guarantees
Dec 03, 2021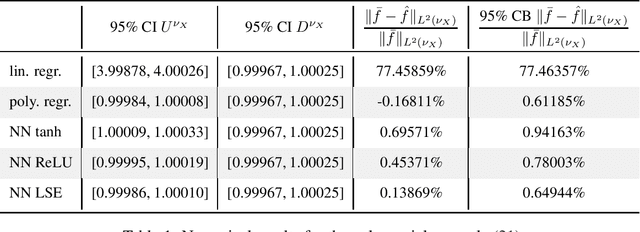
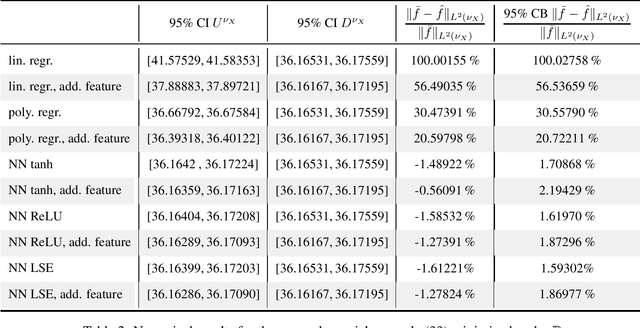
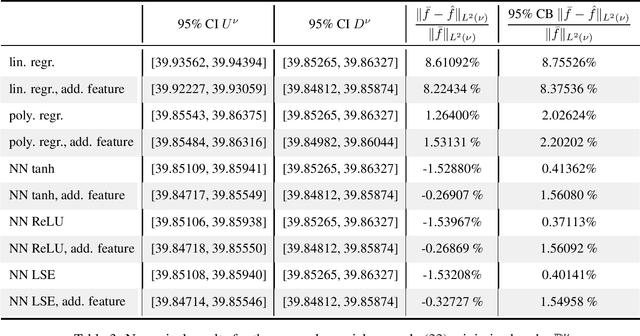
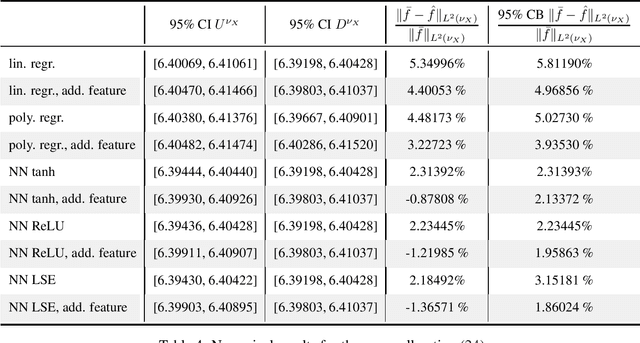
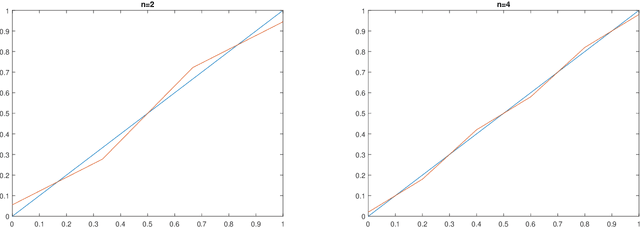
Theoretically, the conditional expectation of a square-integrable random variable $Y$ given a $d$-dimensional random vector $X$ can be obtained by minimizing the mean squared distance between $Y$ and $f(X)$ over all Borel measurable functions $f \colon \mathbb{R}^d \to \mathbb{R}$. However, in many applications this minimization problem cannot be solved exactly, and instead, a numerical method that computes an approximate minimum over a suitable subfamily of Borel functions has to be used. The quality of the result depends on the adequacy of the subfamily and the performance of the numerical method. In this paper, we derive an expected value representation of the minimal mean square distance which in many applications can efficiently be approximated with a standard Monte Carlo average. This enables us to provide guarantees for the accuracy of any numerical approximation of a given conditional expectation. We illustrate the method by assessing the quality of approximate conditional expectations obtained by linear, polynomial as well as neural network regression in different concrete examples.
Landscape analysis for shallow ReLU neural networks: complete classification of critical points for affine target functions
Mar 19, 2021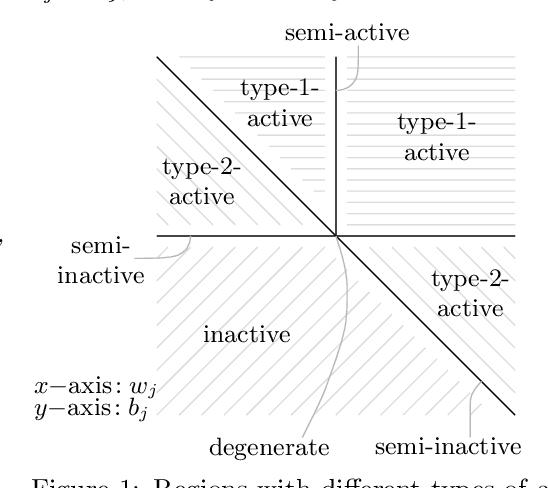
In this paper, we analyze the landscape of the true loss of a ReLU neural network with one hidden layer. We provide a complete classification of the critical points in the case where the target function is affine. In particular, we prove that local minima and saddle points have to be of a special form and show that there are no local maxima. Our approach is of a combinatorial nature and builds on a careful analysis of the different types of hidden neurons that can occur in a ReLU neural network.
A proof of convergence for gradient descent in the training of artificial neural networks for constant target functions
Feb 19, 2021Gradient descent optimization algorithms are the standard ingredients that are used to train artificial neural networks (ANNs). Even though a huge number of numerical simulations indicate that gradient descent optimization methods do indeed convergence in the training of ANNs, until today there is no rigorous theoretical analysis which proves (or disproves) this conjecture. In particular, even in the case of the most basic variant of gradient descent optimization algorithms, the plain vanilla gradient descent method, it remains an open problem to prove or disprove the conjecture that gradient descent converges in the training of ANNs. In this article we solve this problem in the special situation where the target function under consideration is a constant function. More specifically, in the case of constant target functions we prove in the training of rectified fully-connected feedforward ANNs with one-hidden layer that the risk function of the gradient descent method does indeed converge to zero. Our mathematical analysis strongly exploits the property that the rectifier function is the activation function used in the considered ANNs. A key contribution of this work is to explicitly specify a Lyapunov function for the gradient flow system of the ANN parameters. This Lyapunov function is the central tool in our convergence proof of the gradient descent method.
Deep learning based numerical approximation algorithms for stochastic partial differential equations and high-dimensional nonlinear filtering problems
Dec 02, 2020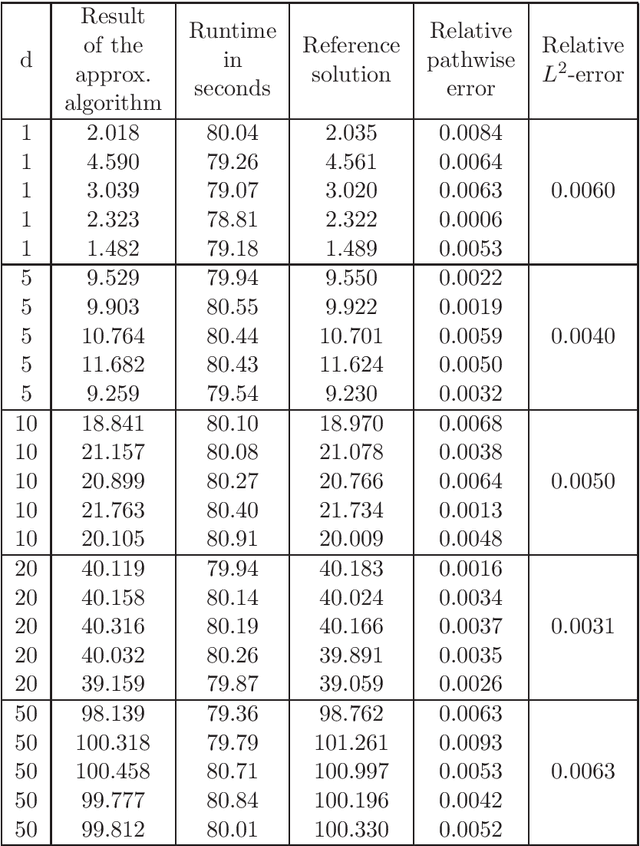
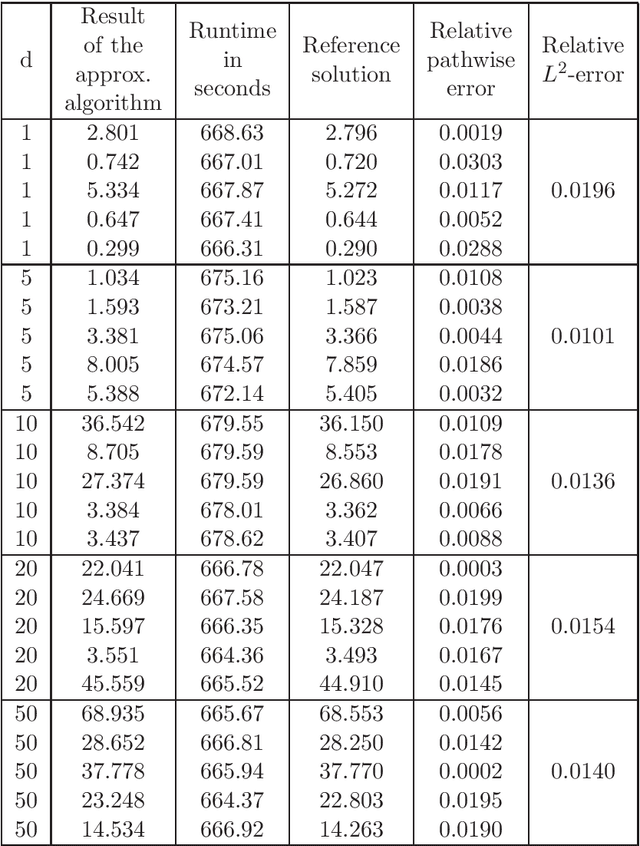
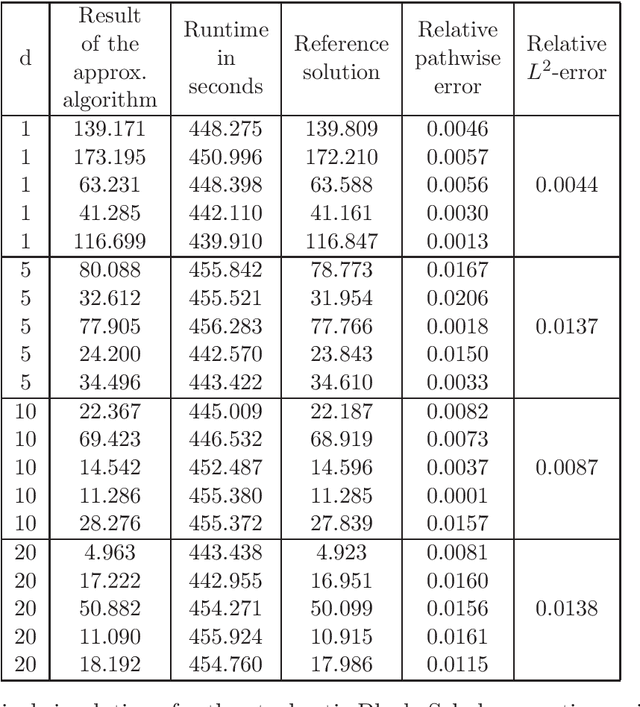
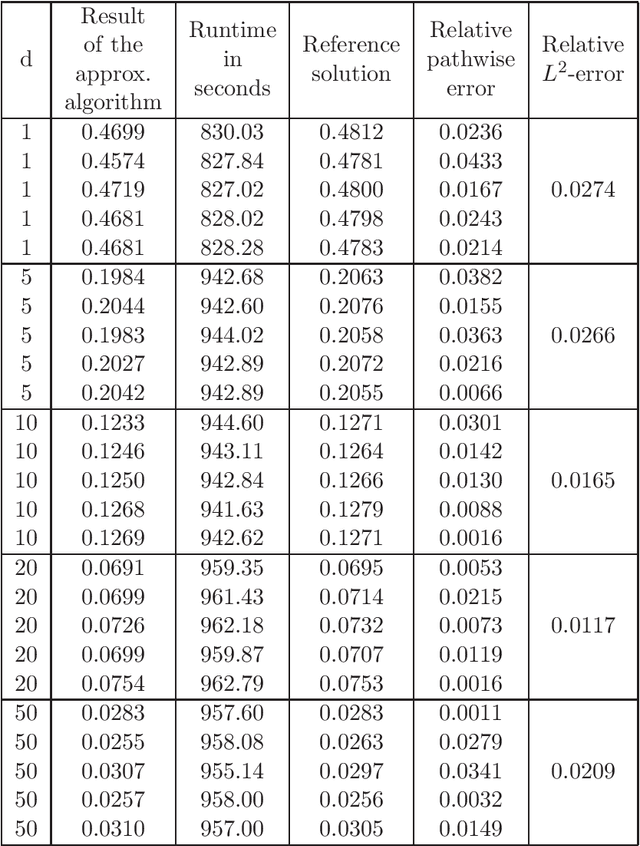
In this article we introduce and study a deep learning based approximation algorithm for solutions of stochastic partial differential equations (SPDEs). In the proposed approximation algorithm we employ a deep neural network for every realization of the driving noise process of the SPDE to approximate the solution process of the SPDE under consideration. We test the performance of the proposed approximation algorithm in the case of stochastic heat equations with additive noise, stochastic heat equations with multiplicative noise, stochastic Black--Scholes equations with multiplicative noise, and Zakai equations from nonlinear filtering. In each of these SPDEs the proposed approximation algorithm produces accurate results with short run times in up to 50 space dimensions.
Non-convergence of stochastic gradient descent in the training of deep neural networks
Jun 12, 2020Deep neural networks have successfully been trained in various application areas with stochastic gradient descent. However, there exists no rigorous mathematical explanation why this works so well. The training of neural networks with stochastic gradient descent has four different discretization parameters: (i) the network architecture; (ii) the size of the training data; (iii) the number of gradient steps; and (iv) the number of randomly initialized gradient trajectories. While it can be shown that the approximation error converges to zero if all four parameters are sent to infinity in the right order, we demonstrate in this paper that stochastic gradient descent fails to converge for rectified linear unit networks if their depth is much larger than their width and the number of random initializations does not increase to infinity fast enough.