 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Geospatial Inference with a Population Dynamics Foundation Model
Nov 13, 2024



Supporting the health and well-being of dynamic populations around the world requires governmental agencies, organizations and researchers to understand and reason over complex relationships between human behavior and local contexts in order to identify high-risk groups and strategically allocate limited resources. Traditional approaches to these classes of problems often entail developing manually curated, task-specific features and models to represent human behavior and the natural and built environment, which can be challenging to adapt to new, or even, related tasks. To address this, we introduce a Population Dynamics Foundation Model (PDFM) that aims to capture the relationships between diverse data modalities and is applicable to a broad range of geospatial tasks. We first construct a geo-indexed dataset for postal codes and counties across the United States, capturing rich aggregated information on human behavior from maps, busyness, and aggregated search trends, and environmental factors such as weather and air quality. We then model this data and the complex relationships between locations using a graph neural network, producing embeddings that can be adapted to a wide range of downstream tasks using relatively simple models. We evaluate the effectiveness of our approach by benchmarking it on 27 downstream tasks spanning three distinct domains: health indicators, socioeconomic factors, and environmental measurements. The approach achieves state-of-the-art performance on all 27 geospatial interpolation tasks, and on 25 out of the 27 extrapolation and super-resolution tasks. We combined the PDFM with a state-of-the-art forecasting foundation model, TimesFM, to predict unemployment and poverty, achieving performance that surpasses fully supervised forecasting. The full set of embeddings and sample code are publicly available for researchers.
Motion Style Transfer: Modular Low-Rank Adaptation for Deep Motion Forecasting
Nov 06, 2022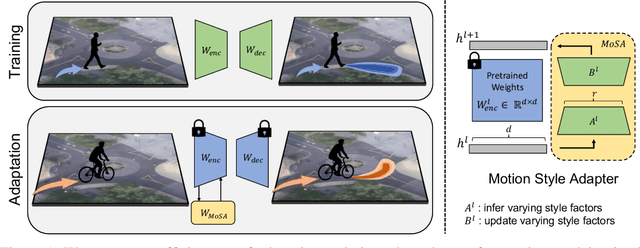
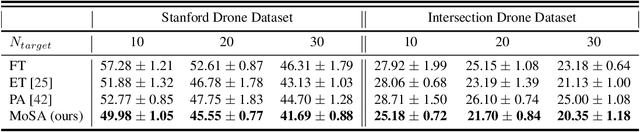
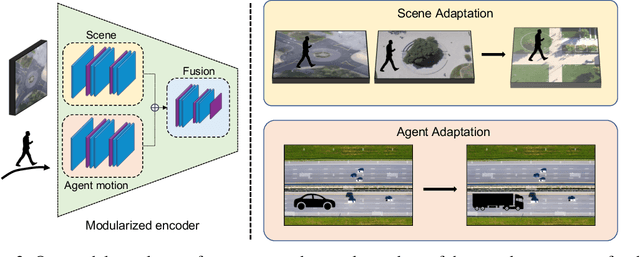

Deep motion forecasting models have achieved great success when trained on a massive amount of data. Yet, they often perform poorly when training data is limited. To address this challenge, we propose a transfer learning approach for efficiently adapting pre-trained forecasting models to new domains, such as unseen agent types and scene contexts. Unlike the conventional fine-tuning approach that updates the whole encoder, our main idea is to reduce the amount of tunable parameters that can precisely account for the target domain-specific motion style. To this end, we introduce two components that exploit our prior knowledge of motion style shifts: (i) a low-rank motion style adapter that projects and adjusts the style features at a low-dimensional bottleneck; and (ii) a modular adapter strategy that disentangles the features of scene context and motion history to facilitate a fine-grained choice of adaptation layers. Through extensive experimentation, we show that our proposed adapter design, coined MoSA, outperforms prior methods on several forecasting benchmarks.
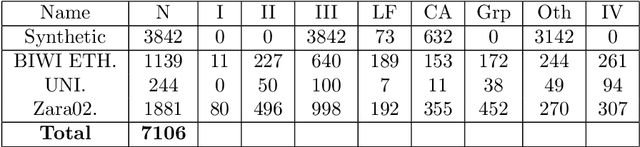
Safety-compliant Generative Adversarial Networks for Human Trajectory Forecasting
Sep 25, 2022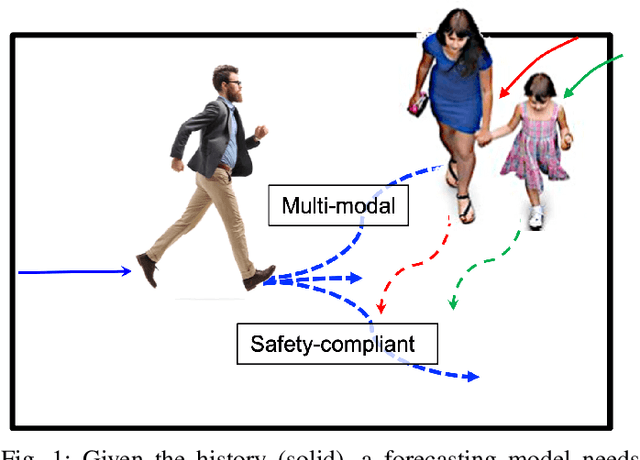
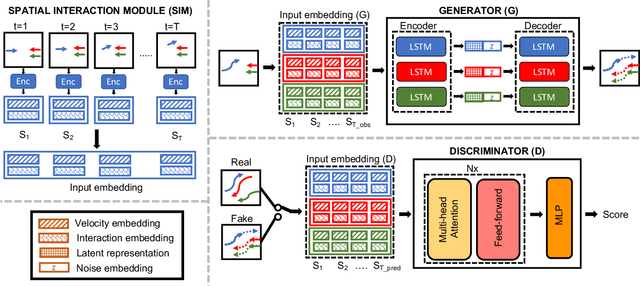
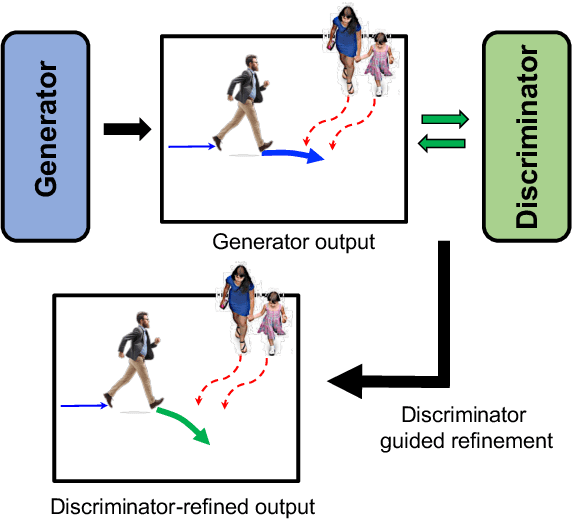
Human trajectory forecasting in crowds presents the challenges of modelling social interactions and outputting collision-free multimodal distribution. Following the success of Social Generative Adversarial Networks (SGAN), recent works propose various GAN-based designs to better model human motion in crowds. Despite superior performance in reducing distance-based metrics, current networks fail to output socially acceptable trajectories, as evidenced by high collisions in model predictions. To counter this, we introduce SGANv2: an improved safety-compliant SGAN architecture equipped with spatio-temporal interaction modelling and a transformer-based discriminator. The spatio-temporal modelling ability helps to learn the human social interactions better while the transformer-based discriminator design improves temporal sequence modelling. Additionally, SGANv2 utilizes the learned discriminator even at test-time via a collaborative sampling strategy that not only refines the colliding trajectories but also prevents mode collapse, a common phenomenon in GAN training. Through extensive experimentation on multiple real-world and synthetic datasets, we demonstrate the efficacy of SGANv2 to provide socially-compliant multimodal trajectories.
DriverGym: Democratising Reinforcement Learning for Autonomous Driving
Nov 12, 2021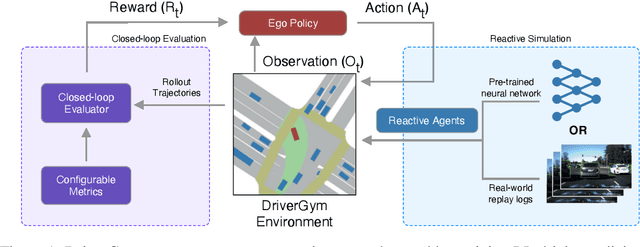
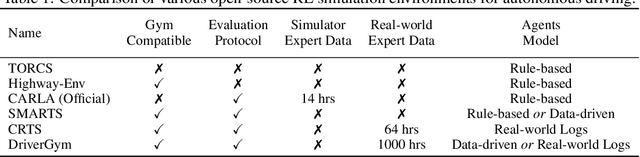
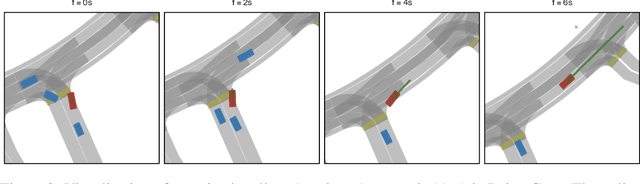
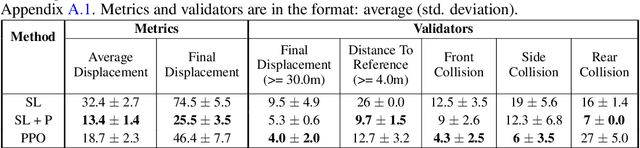
Despite promising progress in reinforcement learning (RL), developing algorithms for autonomous driving (AD) remains challenging: one of the critical issues being the absence of an open-source platform capable of training and effectively validating the RL policies on real-world data. We propose DriverGym, an open-source OpenAI Gym-compatible environment specifically tailored for developing RL algorithms for autonomous driving. DriverGym provides access to more than 1000 hours of expert logged data and also supports reactive and data-driven agent behavior. The performance of an RL policy can be easily validated on real-world data using our extensive and flexible closed-loop evaluation protocol. In this work, we also provide behavior cloning baselines using supervised learning and RL, trained in DriverGym. We make DriverGym code, as well as all the baselines publicly available to further stimulate development from the community.
Interpretable Social Anchors for Human Trajectory Forecasting in Crowds
May 07, 2021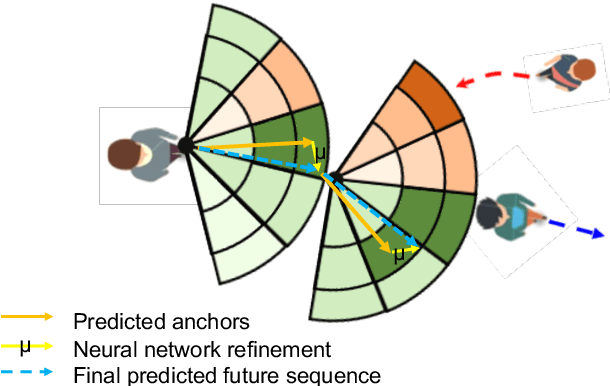
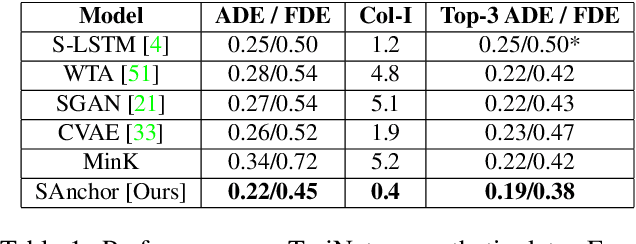
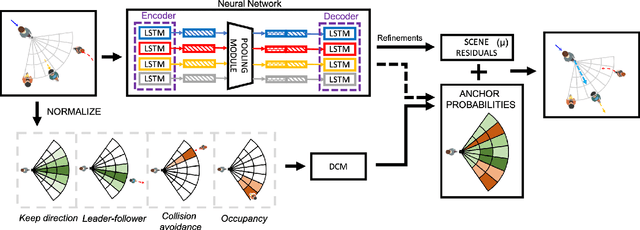
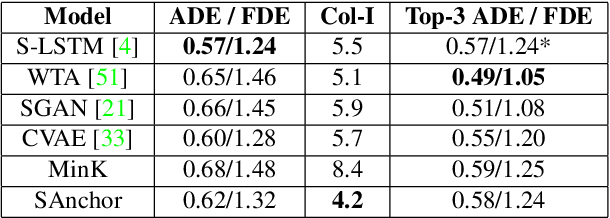
Human trajectory forecasting in crowds, at its core, is a sequence prediction problem with specific challenges of capturing inter-sequence dependencies (social interactions) and consequently predicting socially-compliant multimodal distributions. In recent years, neural network-based methods have been shown to outperform hand-crafted methods on distance-based metrics. However, these data-driven methods still suffer from one crucial limitation: lack of interpretability. To overcome this limitation, we leverage the power of discrete choice models to learn interpretable rule-based intents, and subsequently utilise the expressibility of neural networks to model scene-specific residual. Extensive experimentation on the interaction-centric benchmark TrajNet++ demonstrates the effectiveness of our proposed architecture to explain its predictions without compromising the accuracy.
Human Trajectory Forecasting in Crowds: A Deep Learning Perspective
Jul 07, 2020

Since the past few decades, human trajectory forecasting has been a field of active research owing to its numerous real-world applications: evacuation situation analysis, traffic operations, deployment of social robots in crowded environments, to name a few. In this work, we cast the problem of human trajectory forecasting as learning a representation of human social interactions. Early works handcrafted this representation based on domain knowledge. However, social interactions in crowded environments are not only diverse but often subtle. Recently, deep learning methods have outperformed their handcrafted counterparts, as they learned about human-human interactions in a more generic data-driven fashion. In this work, we present an in-depth analysis of existing deep learning based methods for modelling social interactions. Based on our analysis, we propose a simple yet powerful method for effectively capturing these social interactions. To objectively compare the performance of these interaction-based forecasting models, we develop a large scale interaction-centric benchmark TrajNet++, a significant yet missing component in the field of human trajectory forecasting. We propose novel performance metrics that evaluate the ability of a model to output socially acceptable trajectories. Experiments on TrajNet++ validate the need for our proposed metrics, and our method outperforms competitive baselines on both real-world and synthetic datasets.
Collaborative GAN Sampling
Feb 02, 2019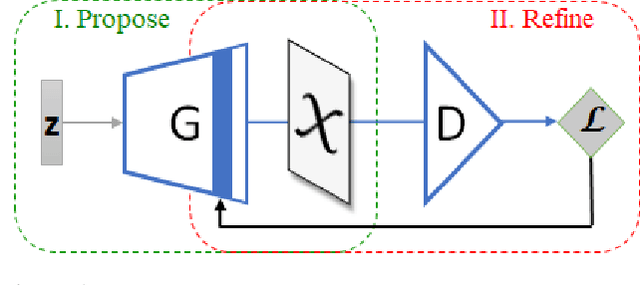

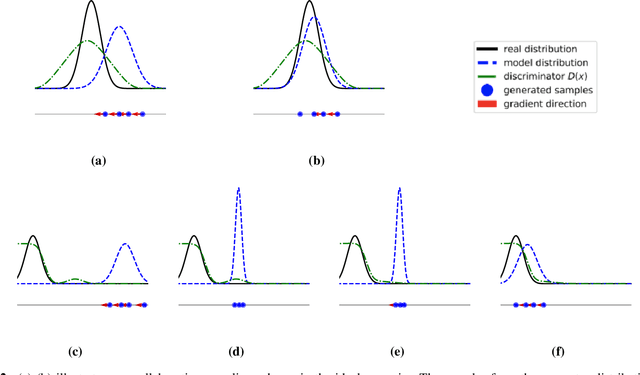

Generative adversarial networks (GANs) have shown great promise in generating complex data such as images. A standard practice in GANs is to discard the discriminator after training and use only the generator for sampling. However, this loses valuable information of real data distribution learned by the discriminator. In this work, we propose a collaborative sampling scheme between the generator and discriminator for improved data generation. Guided by the discriminator, our approach refines generated samples through gradient-based optimization, shifting the generator distribution closer to the real data distribution. Additionally, we present a practical discriminator shaping method that can further improve the sample refinement process. Orthogonal to existing GAN variants, our proposed method offers a new degree of freedom in GAN sampling. We demonstrate its efficacy through experiments on synthetic data and image generation tasks.