 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Conditional Diffusion Model for Electrical Impedance Tomography Image Reconstruction
Dec 22, 2024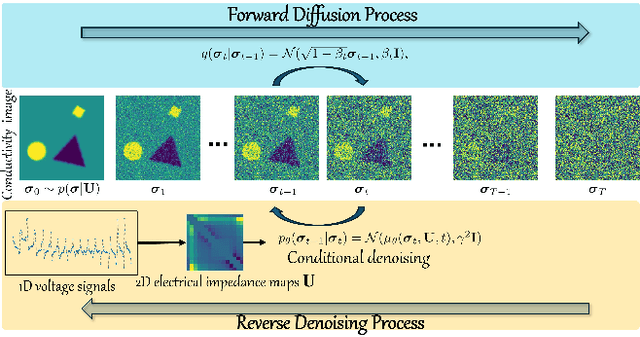
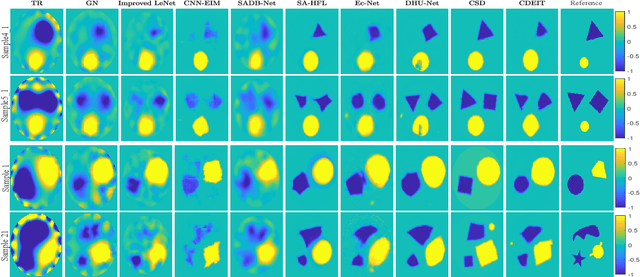
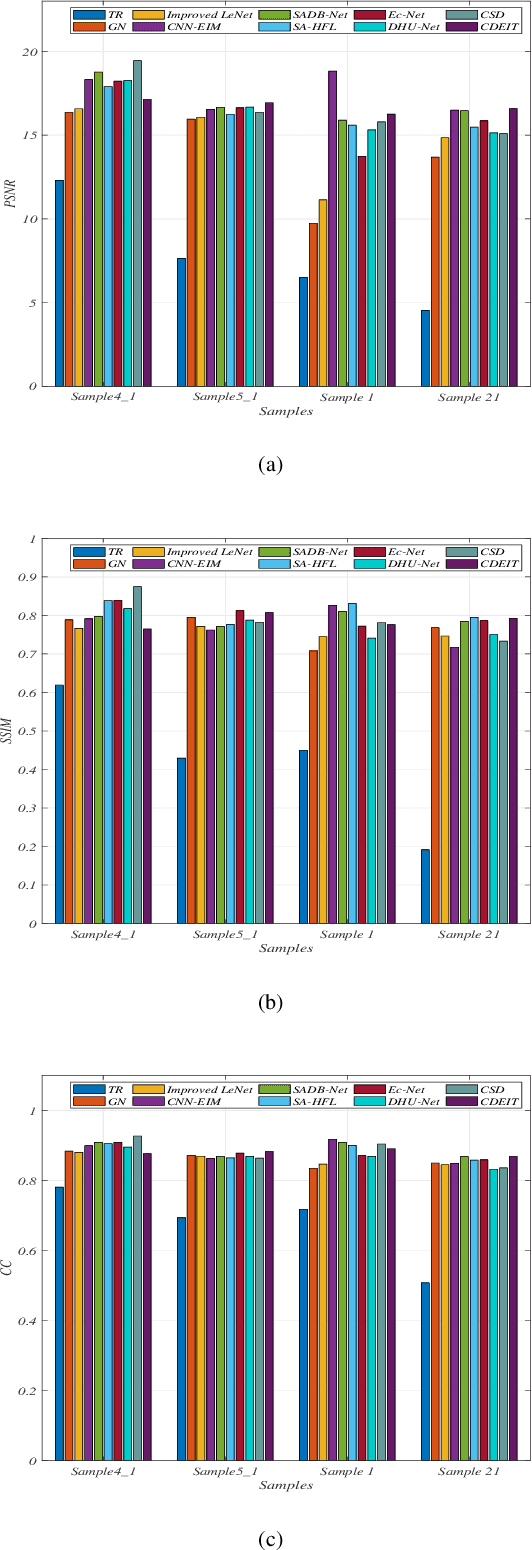
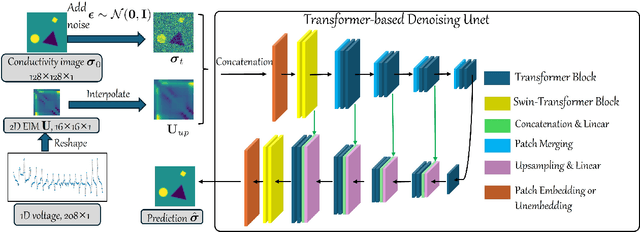
Electrical impedance tomography (EIT) is a non-invasive imaging technique, capable of reconstructing images of the electrical conductivity of tissues and materials. It is popular in diverse application areas, from medical imaging to industrial process monitoring and tactile sensing, due to its low cost, real-time capabilities and non-ionizing nature. EIT visualizes the conductivity distribution within a body by measuring the boundary voltages, given a current injection. However, EIT image reconstruction is ill-posed due to the mismatch between the under-sampled voltage data and the high-resolution conductivity image. A variety of approaches, both conventional and deep learning-based, have been proposed, capitalizing on the use of spatial regularizers, and the paradigm of image regression. In this research, a novel method based on the conditional diffusion model for EIT reconstruction is proposed, termed CDEIT. Specifically, CDEIT consists of the forward diffusion process, which first gradually adds Gaussian noise to the clean conductivity images, and a reverse denoising process, which learns to predict the original conductivity image from its noisy version, conditioned on the boundary voltages. Following model training, CDEIT applies the conditional reverse process on test voltage data to generate the desired conductivities. Moreover, we provide the details of a normalization procedure, which demonstrates how EIT image reconstruction models trained on simulated datasets can be applied on real datasets with varying sizes, excitation currents and background conductivities. Experiments conducted on a synthetic dataset and two real datasets demonstrate that the proposed model outperforms state-of-the-art methods. The CDEIT software is available as open-source (https://github.com/shuaikaishi/CDEIT) for reproducibility purposes.
Physics-Driven AI Correction in Laser Absorption Sensing Quantification
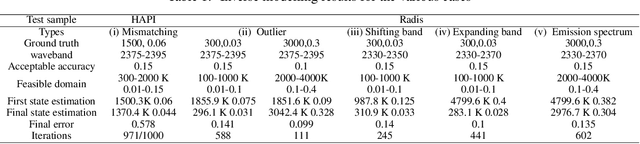
Aug 20, 2024Laser absorption spectroscopy (LAS) quantification is a popular tool used in measuring temperature and concentration of gases. It has low error tolerance, whereas current ML-based solutions cannot guarantee their measure reliability. In this work, we propose a new framework, SPEC, to address this issue. In addition to the conventional ML estimator-based estimation mode, SPEC also includes a Physics-driven Anomaly Detection module (PAD) to assess the error of the estimation. And a Correction mode is designed to correct the unreliable estimation. The correction mode is a network-based optimization algorithm, which uses the guidance of error to iteratively correct the estimation. A hybrid surrogate error model is proposed to estimate the error distribution, which contains an ensemble of networks to simulate reconstruction error, and true feasible error computation. A greedy ensemble search is proposed to find the optimal correction robustly and efficiently from the gradient guidance of surrogate model. The proposed SPEC is validated on the test scenarios which are outside the training distribution. The results show that SPEC can significantly improve the estimation quality, and the correction mode outperforms current network-based optimization algorithms. In addition, SPEC has the reconfigurability, which can be easily adapted to different quantification tasks via changing PAD without retraining the ML estimator.
Physics-Driven ML-Based Modelling for Correcting Inverse Estimation
Sep 25, 2023



When deploying machine learning estimators in science and engineering (SAE) domains, it is critical to avoid failed estimations that can have disastrous consequences, e.g., in aero engine design. This work focuses on detecting and correcting failed state estimations before adopting them in SAE inverse problems, by utilizing simulations and performance metrics guided by physical laws. We suggest to flag a machine learning estimation when its physical model error exceeds a feasible threshold, and propose a novel approach, GEESE, to correct it through optimization, aiming at delivering both low error and high efficiency. The key designs of GEESE include (1) a hybrid surrogate error model to provide fast error estimations to reduce simulation cost and to enable gradient based backpropagation of error feedback, and (2) two generative models to approximate the probability distributions of the candidate states for simulating the exploitation and exploration behaviours. All three models are constructed as neural networks. GEESE is tested on three real-world SAE inverse problems and compared to a number of state-of-the-art optimization/search approaches. Results show that it fails the least number of times in terms of finding a feasible state correction, and requires physical evaluations less frequently in general.
EEE, Remediating the failure of machine learning models via a network-based optimization patch
Apr 22, 2023



A network-based optimization approach, EEE, is proposed for the purpose of providing validation-viable state estimations to remediate the failure of pretrained models. To improve optimization efficiency and convergence, the most important metrics in the context of this research, we follow a three-faceted approach based on the error from the validation process. Firstly, we improve the information content of the error by designing a validation module to acquire high-dimensional error information. Next, we reduce the uncertainty of error transfer by employing an ensemble of error estimators, which only learn implicit errors, and use Constrained Ensemble Exploration to collect high-value data. Finally, the effectiveness of error utilization is improved by using ensemble search to determine the most prosperous state. The benefits of the proposed framework are demonstrated on four real-world engineering problems with diverse state dimensions. It is shown that EEE is either as competitive or outperforms popular optimization methods, in terms of efficiency and convergence.
Spatially-resolved Thermometry from Line-of-Sight Emission Spectroscopy via Machine Learning
Dec 15, 2022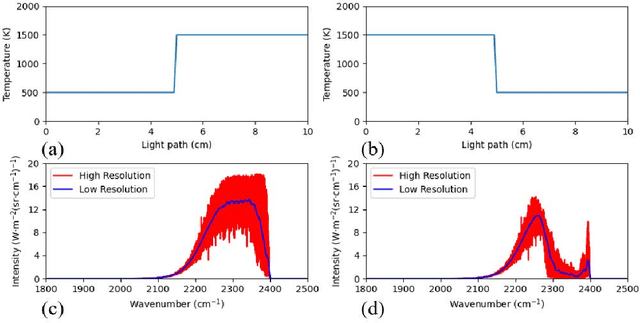

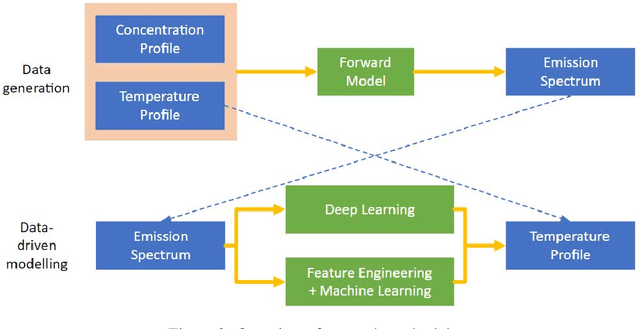

A methodology is proposed, which addresses the caveat that line-of-sight emission spectroscopy presents in that it cannot provide spatially resolved temperature measurements in nonhomogeneous temperature fields. The aim of this research is to explore the use of data-driven models in measuring temperature distributions in a spatially resolved manner using emission spectroscopy data. Two categories of data-driven methods are analyzed: (i) Feature engineering and classical machine learning algorithms, and (ii) end-to-end convolutional neural networks (CNN). In total, combinations of fifteen feature groups and fifteen classical machine learning models, and eleven CNN models are considered and their performances explored. The results indicate that the combination of feature engineering and machine learning provides better performance than the direct use of CNN. Notably, feature engineering which is comprised of physics-guided transformation, signal representation-based feature extraction and Principal Component Analysis is found to be the most effective. Moreover, it is shown that when using the extracted features, the ensemble-based, light blender learning model offers the best performance with RMSE, RE, RRMSE and R values of 64.3, 0.017, 0.025 and 0.994, respectively. The proposed method, based on feature engineering and the light blender model, is capable of measuring nonuniform temperature distributions from low-resolution spectra, even when the species concentration distribution in the gas mixtures is unknown.
Self-Validated Physics-Embedding Network: A General Framework for Inverse Modelling
Oct 17, 2022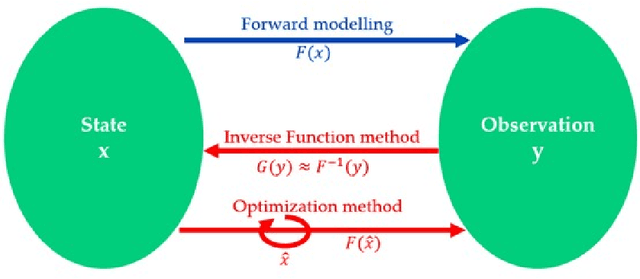
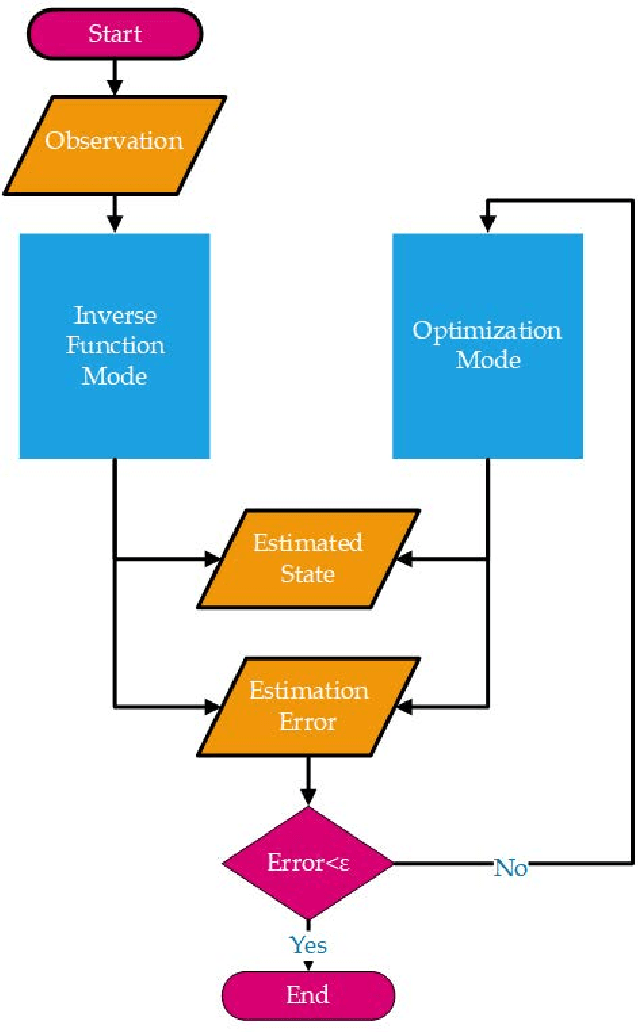
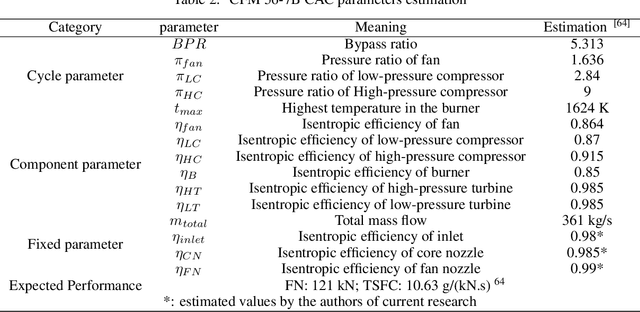
Physics-based inverse modeling techniques are typically restricted to particular research fields, whereas popular machine-learning-based ones are too data-dependent to guarantee the physical compatibility of the solution. In this paper, Self-Validated Physics-Embedding Network (SVPEN), a general neural network framework for inverse modeling is proposed. As its name suggests, the embedded physical forward model ensures that any solution that successfully passes its validation is physically reasonable. SVPEN operates in two modes: (a) the inverse function mode offers rapid state estimation as conventional supervised learning, and (b) the optimization mode offers a way to iteratively correct estimations that fail the validation process. Furthermore, the optimization mode provides SVPEN with reconfigurability i.e., replacing components like neural networks, physical models, and error calculations at will to solve a series of distinct inverse problems without pretraining. More than ten case studies in two highly nonlinear and entirely distinct applications: molecular absorption spectroscopy and Turbofan cycle analysis, demonstrate the generality, physical reliability, and reconfigurability of SVPEN. More importantly, SVPEN offers a solid foundation to use existing physical models within the context of AI, so as to striking a balance between data-driven and physics-driven models.
Realizing Flame State Monitoring with Very Few Visual or Infrared Images via Few-Shot Learning
Oct 14, 2022
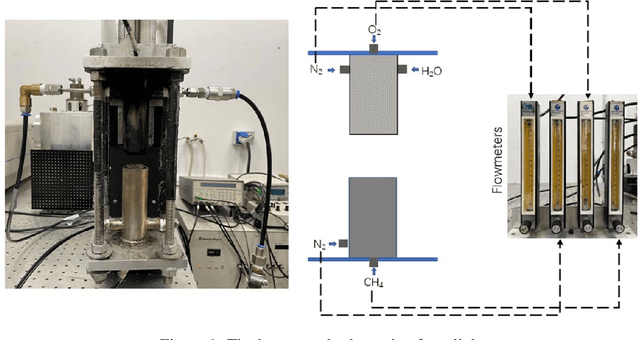
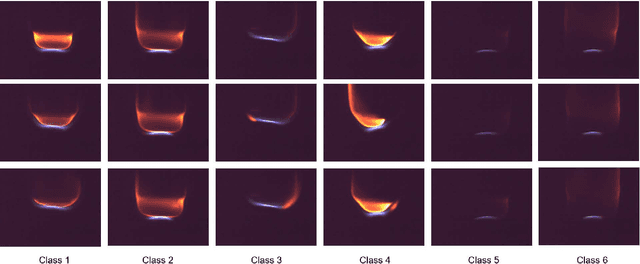
The success of current machine learning on image-based combustion monitoring is based on massive data, which is costly even impossible for industrial applications. To address this conflict, we introduce few-shot learning to combustion monitoring for the first time. Two algorithms, Siamese Network coupled with k Nearest Neighbors (SN-kNN) and Prototypical Network (PN), are attempted. Besides, rather than purely utilizing visual images as previous studies, we also attempt Infrared (IR) images. In this work, we analyze the training process, test performance and inference speed of two algorithms on both image formats, and also use t-SNE to visualize learned features. The results demonstrate that both SN-kNN and PN are capable to distinguish flame states from learning with 20 images per flame state. The worst performance, which is realized by combination of PN and IR images, still possesses precision, accuracy, recall, and F1-score all above 0.95. Through observing images and visualizing features, we realize that visual images have more dramatic differences between classes and have more consistent patterns inside the class, which makes the training speed and model performance on visual images is better. In contrast, the relatively "low-quality" IR images makes PN hard to extract distinguishable prototypes, which causes the relative weak performance, but with the whole training set to support classification, SN-kNN cooperates well with IR images. On the other hand, benefited from the architecture design, PN has a much faster speed in training and inference than SN-kNN. The work here analyzes the characteristics of both algorithms and image formats for the first time, which provides the guidance for further utilizing them in combustion monitoring tasks.
A Novel Transformer Network with Shifted Window Cross-Attention for Spatiotemporal Weather Forecasting
Aug 02, 2022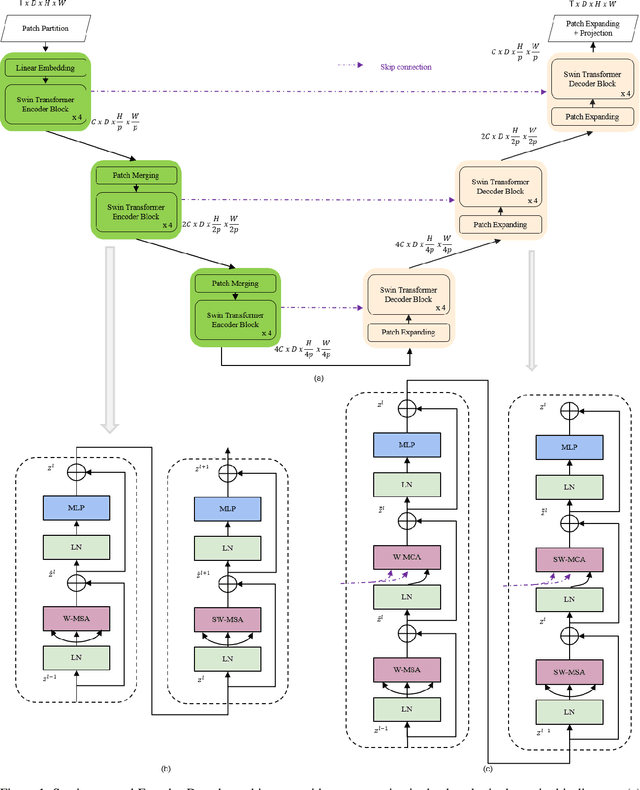
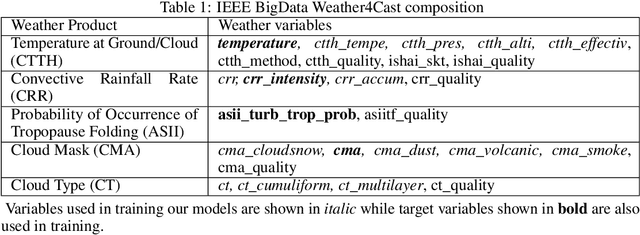
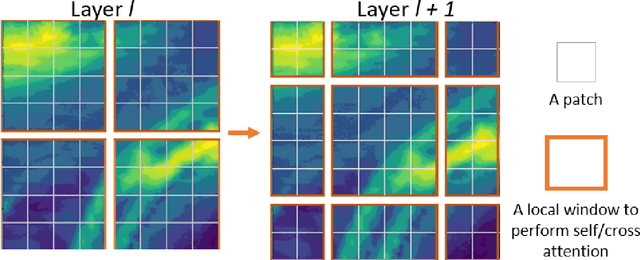

Earth Observatory is a growing research area that can capitalize on the powers of AI for short time forecasting, a Now-casting scenario. In this work, we tackle the challenge of weather forecasting using a video transformer network. Vision transformer architectures have been explored in various applications, with major constraints being the computational complexity of Attention and the data hungry training. To address these issues, we propose the use of Video Swin-Transformer, coupled with a dedicated augmentation scheme. Moreover, we employ gradual spatial reduction on the encoder side and cross-attention on the decoder. The proposed approach is tested on the Weather4Cast2021 weather forecasting challenge data, which requires the prediction of 8 hours ahead future frames (4 per hour) from an hourly weather product sequence. The dataset was normalized to 0-1 to facilitate using the evaluation metrics across different datasets. The model results in an MSE score of 0.4750 when provided with training data, and 0.4420 during transfer learning without using training data, respectively.
Traffic4cast at NeurIPS 2021 -- Temporal and Spatial Few-Shot Transfer Learning in Gridded Geo-Spatial Processes
Apr 01, 2022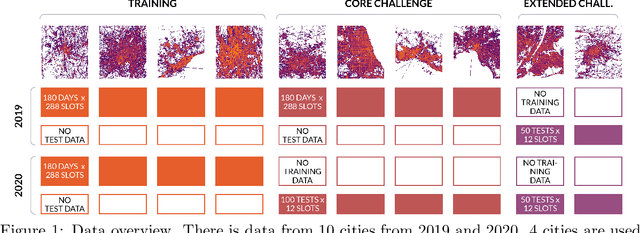
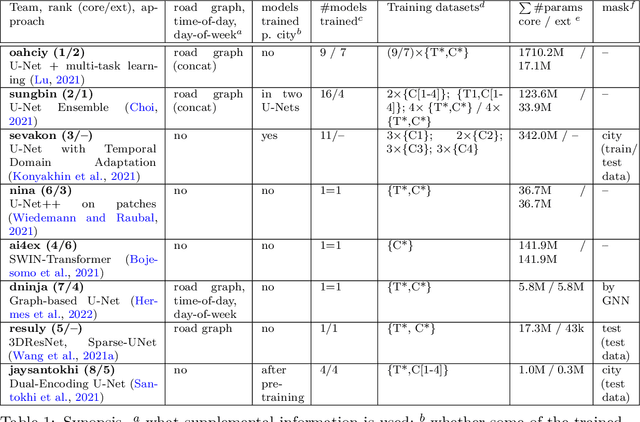

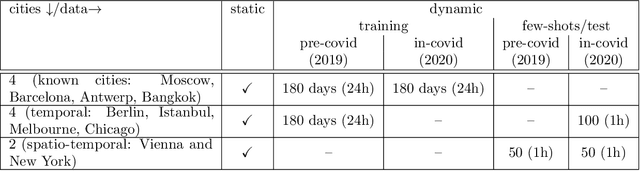
The IARAI Traffic4cast competitions at NeurIPS 2019 and 2020 showed that neural networks can successfully predict future traffic conditions 1 hour into the future on simply aggregated GPS probe data in time and space bins. We thus reinterpreted the challenge of forecasting traffic conditions as a movie completion task. U-Nets proved to be the winning architecture, demonstrating an ability to extract relevant features in this complex real-world geo-spatial process. Building on the previous competitions, Traffic4cast 2021 now focuses on the question of model robustness and generalizability across time and space. Moving from one city to an entirely different city, or moving from pre-COVID times to times after COVID hit the world thus introduces a clear domain shift. We thus, for the first time, release data featuring such domain shifts. The competition now covers ten cities over 2 years, providing data compiled from over 10^12 GPS probe data. Winning solutions captured traffic dynamics sufficiently well to even cope with these complex domain shifts. Surprisingly, this seemed to require only the previous 1h traffic dynamic history and static road graph as input.
SwinUNet3D -- A Hierarchical Architecture for Deep Traffic Prediction using Shifted Window Transformers
Jan 17, 2022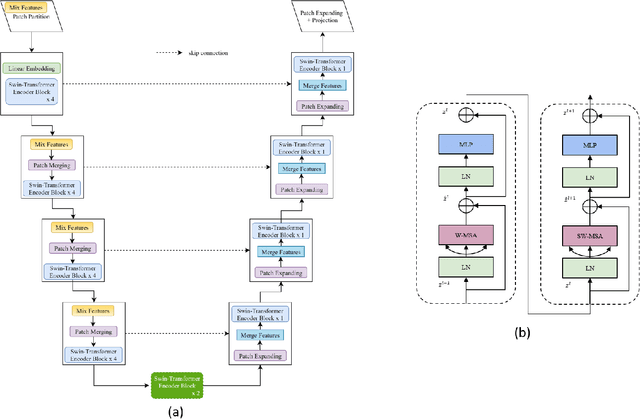
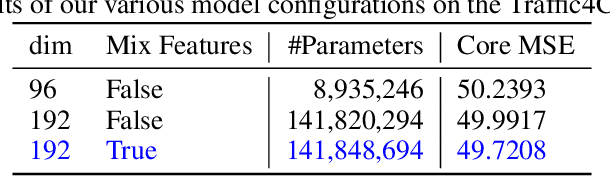
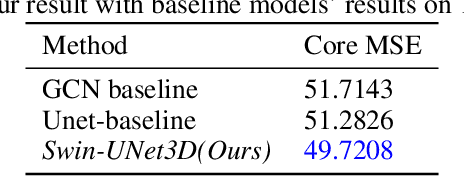
Traffic forecasting is an important element of mobility management, an important key that drives the logistics industry. Over the years, lots of work have been done in Traffic forecasting using time series as well as spatiotemporal dynamic forecasting. In this paper, we explore the use of vision transformer in a UNet setting. We completely remove all convolution-based building blocks in UNet, while using 3D shifted window transformer in both encoder and decoder branches. In addition, we experiment with the use of feature mixing just before patch encoding to control the inter-relationship of the feature while avoiding contraction of the depth dimension of our spatiotemporal input. The proposed network is tested on the data provided by Traffic Map Movie Forecasting Challenge 2021(Traffic4cast2021), held in the competition track of Neural Information Processing Systems (NeurIPS). Traffic4cast2021 task is to predict an hour (6 frames) of traffic conditions (volume and average speed)from one hour of given traffic state (12 frames averaged in 5 minutes time span). Source code is available online at https://github.com/bojesomo/Traffic4Cast2021-SwinUNet3D.