 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Microgravity Simulation Experimental Platform For Small Space Robots In Orbit
Apr 26, 2025This study describes the development and validation of a novel microgravity experimental platform that is mainly applied to small robots such as modular self-reconfigurable robots. This platform mainly consists of an air supply system, a microporous platform and glass. By supplying air to the microporous platform to form an air film, the influence of the weight of the air foot and the ventilation hose of traditional air-float platforms on microgravity experiments is solved. The contribution of this work is to provide a platform with less external interference for microgravity simulation experiments on small robots.
Physical design optimization for automated drug dispensing systems in a human-machine interaction environment
Dec 18, 2023Automated drug dispensing systems (ADDSs) are increasingly in demand in today's pharmacies due to the growing aging population. Recognizing the practical needs faced by hospitals utilizing ADDSs, this study focuses on optimizing the physical design of ADDSs in a human-machine interaction environment. Specifically, we investigate the retrieval sequencing of drugs among successive prescription orders. To compare the efficiency of ADDSs with the different number of input/output designs, we formulate dual command retrieval sequencing models that optimize the retrieval sequence of drugs in adjacent prescription orders. In particular, we consider the stochastic service time of pharmacists in the 0-1 integer programming models to analyze the impact on humans. Through experimental comparisons of average picking times for prescription orders under different layout designs, the system layout with two input/output points significantly enhances the efficiency of prescription order fulfillment within a human-machine interaction environment. Furthermore, the proposed retrieval sequence method outperforms dynamic programming, greedy, and random strategies in improving prescription order-picking efficiency.
A Quick Response Algorithm for Dynamic Autonomous Mobile Robot Routing Problem with Time Windows
Nov 26, 2023



This paper investigates the optimization problem of scheduling autonomous mobile robots (AMRs) in hospital settings, considering dynamic requests with different priorities. The primary objective is to minimize the daily service cost by dynamically planning routes for the limited number of available AMRs. The total cost consists of AMR's purchase cost, transportation cost, delay penalty cost, and loss of denial of service. To address this problem, we have established a two-stage mathematical programming model. In the first stage, a tabu search algorithm is employed to plan prior routes for all known medical requests. The second stage involves planning for real-time received dynamic requests using the efficient insertion algorithm with decision rules, which enables quick response based on the time window and demand constraints of the dynamic requests. One of the main contributions of this study is to make resource allocation decisions based on the present number of service AMRs for dynamic requests with different priorities. Computational experiments using Lackner instances demonstrate the efficient insertion algorithm with decision rules is very fast and robust in solving the dynamic AMR routing problem with time windows and request priority. Additionally, we provide managerial insights concerning the AMR's safety stock settings, which can aid in decision-making processes.
The Multi-trip Autonomous Mobile Robots Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals
Jul 30, 2023



Autonomous Mobile Robots (AMRs) play a crucial role in transportation and service tasks at hospitals, contributing to enhanced efficiency and meeting medical demands. This paper investigates the optimization problem of scheduling strategies for AMRs at smart hospitals, where the service and travel times of AMRs are stochastic. We formulate a stochastic mixed integer programming model to minimize the total cost of the hospital by reducing the number of AMRs and travel distance while satisfying constraints such as AMR battery state of charge, AMR capacity, and time windows for medical requests. To address this objective, we identify several properties for generating high-quality solutions efficiently. We improve the Variable Neighborhood Search (VNS) algorithm by incorporating the properties of the AMR scheduling problem to solve the model. Experimental results demonstrate that VNS generates higher-quality solutions compared to existing methods. By intelligently arranging the driving routes of AMRs for both charging and service requests, we achieve substantial cost reductions for hospitals, enhancing the utilization of medical resources.
Fully Automated Deep Learning-enabled Detection for Hepatic Steatosis on Computed Tomography: A Multicenter International Validation Study
Nov 06, 2022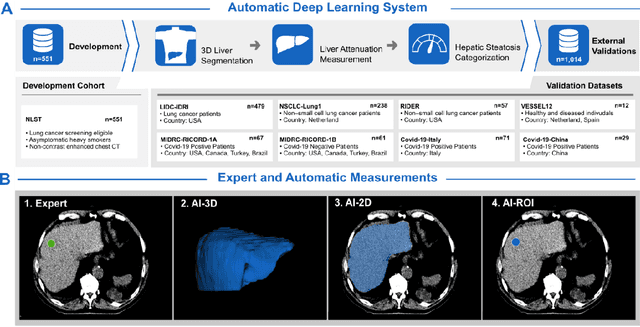

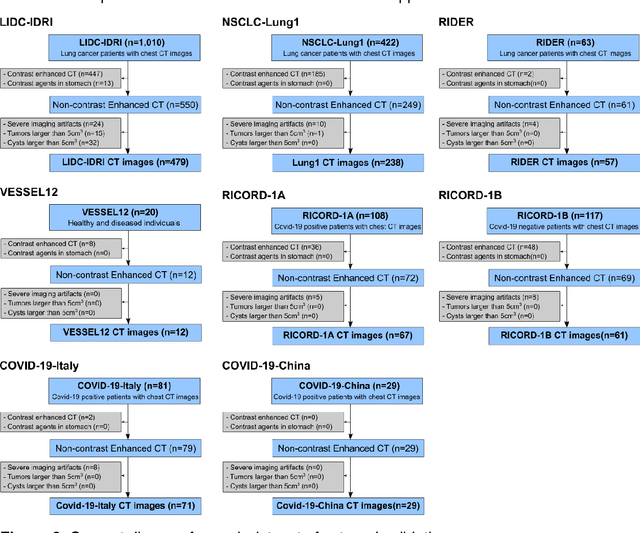

Despite high global prevalence of hepatic steatosis, no automated diagnostics demonstrated generalizability in detecting steatosis on multiple international datasets. Traditionally, hepatic steatosis detection relies on clinicians selecting the region of interest (ROI) on computed tomography (CT) to measure liver attenuation. ROI selection demands time and expertise, and therefore is not routinely performed in populations. To automate the process, we validated an existing artificial intelligence (AI) system for 3D liver segmentation and used it to purpose a novel method: AI-ROI, which could automatically select the ROI for attenuation measurements. AI segmentation and AI-ROI method were evaluated on 1,014 non-contrast enhanced chest CT images from eight international datasets: LIDC-IDRI, NSCLC-Lung1, RIDER, VESSEL12, RICORD-1A, RICORD-1B, COVID-19-Italy, and COVID-19-China. AI segmentation achieved a mean dice coefficient of 0.957. Attenuations measured by AI-ROI showed no significant differences (p = 0.545) and a reduction of 71% time compared to expert measurements. The area under the curve (AUC) of the steatosis classification of AI-ROI is 0.921 (95% CI: 0.883 - 0.959). If performed as a routine screening method, our AI protocol could potentially allow early non-invasive, non-pharmacological preventative interventions for hepatic steatosis. 1,014 expert-annotated liver segmentations of patients with hepatic steatosis annotations can be downloaded here: https://drive.google.com/drive/folders/1-g_zJeAaZXYXGqL1OeF6pUjr6KB0igJX.
Is the Skip Connection Provable to Reform the Neural Network Loss Landscape?
Jun 10, 2020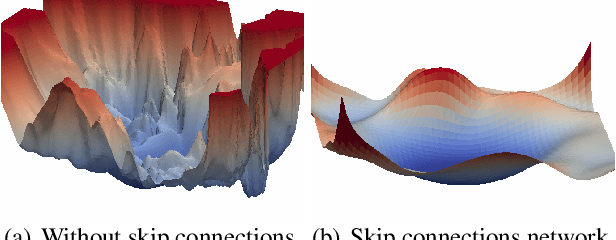
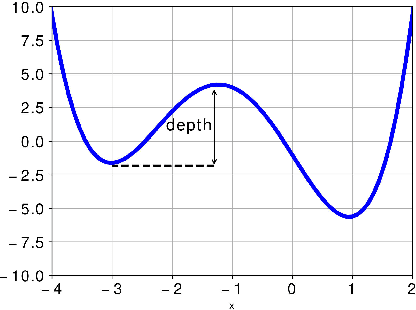
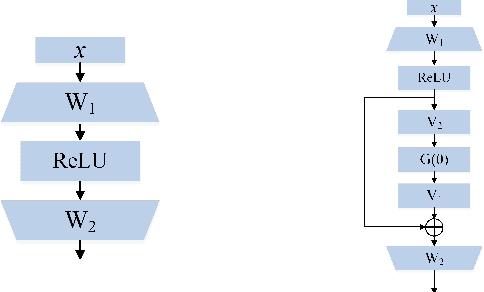
The residual network is now one of the most effective structures in deep learning, which utilizes the skip connections to ``guarantee" the performance will not get worse. However, the non-convexity of the neural network makes it unclear whether the skip connections do provably improve the learning ability since the nonlinearity may create many local minima. In some previous works \cite{freeman2016topology}, it is shown that despite the non-convexity, the loss landscape of the two-layer ReLU network has good properties when the number $m$ of hidden nodes is very large. In this paper, we follow this line to study the topology (sub-level sets) of the loss landscape of deep ReLU neural networks with a skip connection and theoretically prove that the skip connection network inherits the good properties of the two-layer network and skip connections can help to control the connectedness of the sub-level sets, such that any local minima worse than the global minima of some two-layer ReLU network will be very ``shallow". The ``depth" of these local minima are at most $O(m^{(\eta-1)/n})$, where $n$ is the input dimension, $\eta<1$. This provides a theoretical explanation for the effectiveness of the skip connection in deep learning.
On the Convergence of Perturbed Distributed Asynchronous Stochastic Gradient Descent to Second Order Stationary Points in Non-convex Optimization
Oct 21, 2019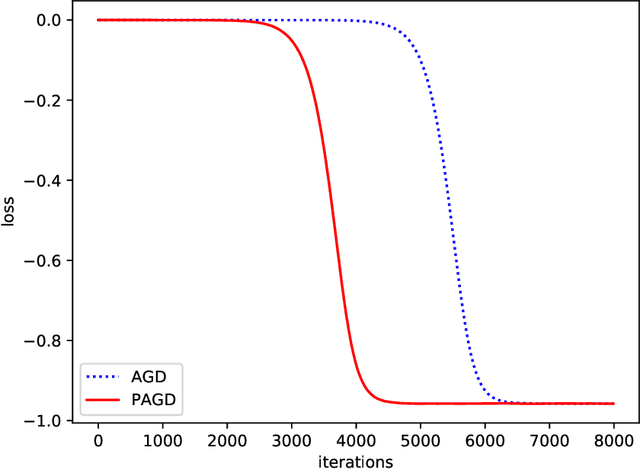
In this paper, the second order convergence of non-convex optimization in the asynchronous stochastic gradient descent (ASGD) algorithm is studied systematically. We investigate the behavior of ASGD near and away from saddle points. Different from the general stochastic gradient descent(SGD), we show that ASGD might return back even if it has escaped the saddle points, yet after staying near a strict saddle point for a long enough time ($O(T)$), ASGD will finally go away from strict saddle points. An inequality is given to describe the process of ASGD to escape saddle points. Using a novel Razumikhin-Lyapunov method, we show the exponential instability of the perturbed gradient dynamics near the strict saddle points and give a more detailed estimation about how the time delay parameter $T$ influences the speed to escape. In particular, we consider the optimization of smooth nonconvex functions, and propose a perturbed asynchronous stochastic gradient descent algorithm with guarantee of convergence to second order stationary points with high probability in $O(1/\epsilon^4)$ iterations. To the best of our knowledge, this is the first work on the second order convergence of asynchronous algorithm.